深入理解ResNet原理解析及代码实现
github地址:https://github.com/pytorch/vision/blob/master/torchvision/models/resnet.py
论文地址:https://arxiv.org/pdf/1512.03385.pdf
解决什么问题
Is learning better networks as easy as stacking more layers? An obstacle to answering this question was the notorious problem of vanishing/exploding gradients [1, 9], which hamper convergence(收敛) from the beginning.
This problem, however, has been largely addressed by normalized initialization [23, 9, 37, 13] and intermediate normalization layers [16], which enable networks with tens of layers to start converging for stochastic gradient descent (SGD) with backpropagation [22].
梯度消失和梯度爆炸的问题阻止了刚开始的收敛,这一问题通过初始化归一化和中间层归一化得到了解决。
a degradation problem has been exposed: with the network depth increasing, accuracy gets saturated (which might be unsurprising) and then degrades rapidly. Unexpectedly, such degradation is not caused by overfitting, and adding more layers to a suitably deep model leads to higher training error.
解决了收敛的问题后又出现了退化的现象:随着层数加深,准确率升高然后急剧下降。且这种退化不是由过拟合造成,且向网络中添加适当多层导致了更大的训练误差。
总结一下,随着网络深度的增加,模型精度并不总是提升,并且这个问题并不是由过拟合(overfitting)造成的,因为网络加深后不仅测试误差变高了,它的训练误差竟然也变高了。作者提出,这可能是因为更深的网络会伴随梯度消失/爆炸问题,从而阻碍网络的收敛。这种加深网络深度但网络性能却下降的现象被称为退化问题。
也就是说,随着深度的增加出现了明显的退化,网络的训练误差和测试误差均出现了明显的增长,ResNet就是为了解决这种退化问题而诞生的。
如何解决
Let us consider a shallower architecture and its deeper counterpart that adds more layers onto it. There exists a solution by construction to the deeper model: the added layers are identity mapping and the other layers are copied from the learned shallower model. The existence of this constructed solution indicates that a deeper model should produce no higher training error than its shallower counterpart.
于是作者提出了解决方案:在一个较浅的架构上添加更多层。 对于更深层次的模型:添加的层是恒等映射(identity mapping),其他层则从学习的浅层模型复制。在这种情况下,更深的模型不应该产生比其对应的较浅的网络更高的训练误差。
残差学习基本单元:
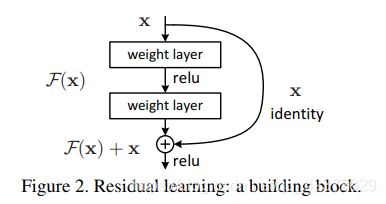
Formally, denoting the desired underlying mapping as H(x), we let the stacked nonlinear layers fit another mapping of F(x) := H(x)−x. The original mapping is recast into F(x)+x. We hypothesize that it is easier to optimize the residual mapping than to optimize the original, unreferenced mapping.
原先的网络输入x,希望输出H(x)。现在我们令H(x)=F(x)+x,那么我们的网络就只需要学习输出一个残差F(x)=H(x)-x。

假设输入为 x,有两层全连接层学习到的映射为H(x),也就是说这两层可以渐进(asymptotically)拟合H(x)。假设 H(x)与x维度相同,那么拟合 H(x) 与拟合残差函数 H(x)-x 等价,令残差函数 F(x)=H(x)-x,则原函数变为 F(x)+x ,于是直接在原网络的基础上加上一个跨层连接,这里的跨层连接也很简单,就是 将x的**恒等映射(Identity Mapping)**传递过去。
本质也就是不改变目标函数 H(x) ,将网络结构拆成两个分支,一个分支是残差映射F(x),一个分支是恒等映射x ,于是网络仅需学习残差映射F(x) 即可。
为何有效
- 自适应深度:网络退化问题就体现了多层网络难以拟合恒等映射这种情况,也就是说 H(x)难以拟合 x ,但使用了残差结构之后,拟合恒等映射变得很容易,直接把网络参数全学习到为0,只留下那个恒等映射的跨层连接即可。于是当网络不需要这么深时,中间的恒等映射就可以多一点,反之就可以少一点。
- “差分放大器”:假设最优 H(x)更接近恒等映射,那么网络更容易发现除恒等映射之外微小的波动
- 缓解梯度消失:针对一个残差结构对输入 x 求导就可以知道,由于跨层连接的存在,总梯度在 F(x) 对 x 的导数基础上还会加1
普通网络与深度残差网络的最大区别在于**,深度残差网络有很多旁路的支线将输入直接连到后面的层,使得后面的层可以直接学习残差**,这些支路就叫做shortcut。传统的卷积层或全连接层在信息传递时,或多或少会存在信息丢失、损耗等问题。ResNet 在某种程度上解决了这个问题,通过直接将输入信息绕道传到输出,保护信息的完整性,整个网络则只需要学习输入、输出差别的那一部分,简化学习目标和难度。
网络实现
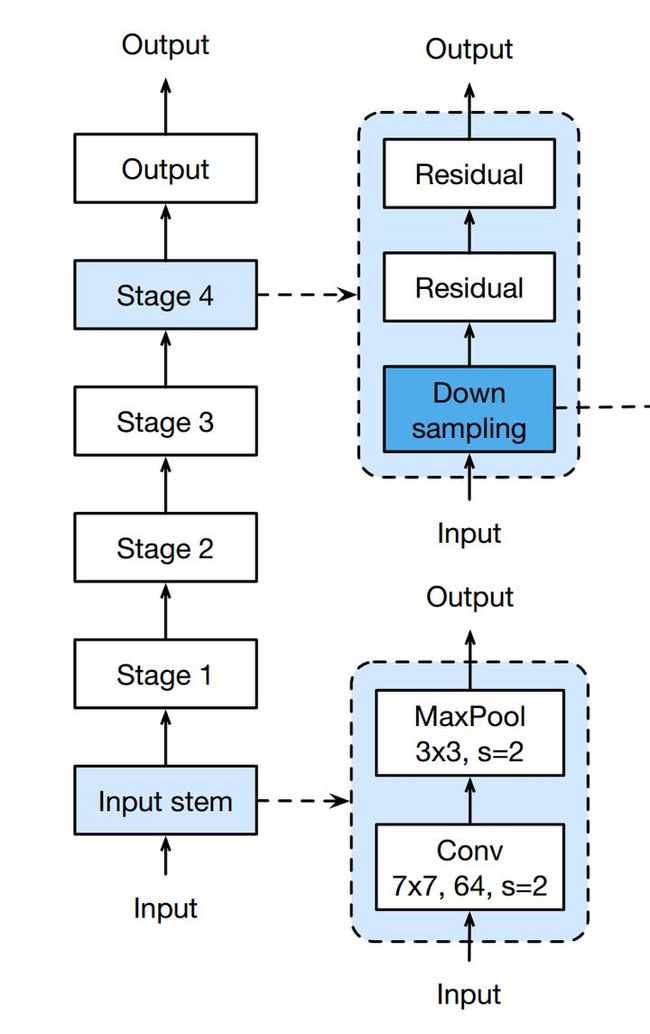
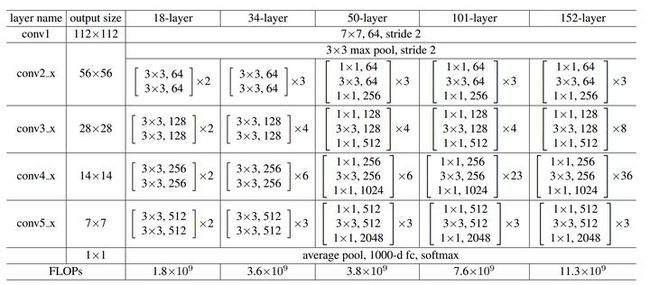
ResNet主要有五种主要形式:Res18,Res34,Res50,Res101,Res152;
如下图所示,每个网络都包括三个主要部分:输入部分、输出部分和中间卷积部分(中间卷积部分包括如图所示的Stage1到Stage4共计四个stage)。尽管ResNet的变种形式丰富,但都遵循上述的结构特点,网络之间的不同主要在于中间卷积部分的block参数和个数存在差异。下面我们以ResNet18为例,看一下整个网络的实现代码是怎样的。
class ResNet(nn.Module):
def forward(self, x):
# 输入
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
# 中间卷积
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
# 输出
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
# 生成一个res18网络
def resnet18(pretrained=False, **kwargs):
model = ResNet(BasicBlock, [2, 2, 2, 2], **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['resnet18']))
return model
(1)数据进入网络后先经过输入部分(conv1, bn1, relu, maxpool);
(2)然后进入中间卷积部分(layer1, layer2, layer3, layer4,这里的layer对应我们之前所说的stage);
(3)最后数据经过一个平均池化和全连接层(avgpool, fc)输出得到结果;
具体来说,resnet18和其他res系列网络的差异主要在于layer1~layer4,其他的部件都是相似的。
网络输入部分
所有的ResNet网络输入部分是一个size=7x7, stride=2的大卷积核,以及一个size=3x3, stride=2的最大池化组成,通过这一步,一个224x224的输入图像就会变56x56大小的特征图,极大减少了存储所需大小。
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
网络中间卷积部分
中间卷积部分主要是下图中的蓝框部分,通过3*3卷积的堆叠来实现信息的提取。红框中的[2, 2, 2, 2]和[3, 4, 6, 3]等则代表了bolck的重复堆叠次数。
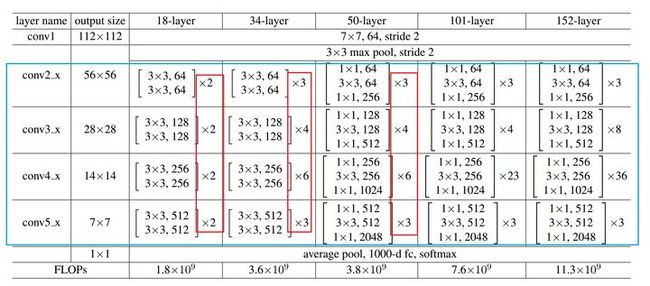
刚刚我们调用的resnet18( )函数中有一句 ResNet(BasicBlock, [2, 2, 2, 2], *kwargs),这里的[2, 2, 2, 2]与图中红框是一致的,如果你将这行代码改为 ResNet(BasicBlock, [3, 4, 6, 3], *kwargs), 那你就会得到一个res34网络。
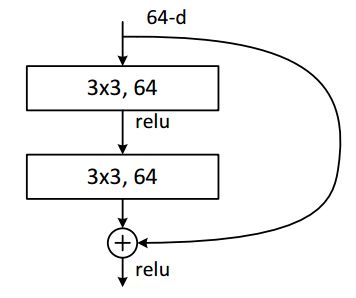
残差块实现
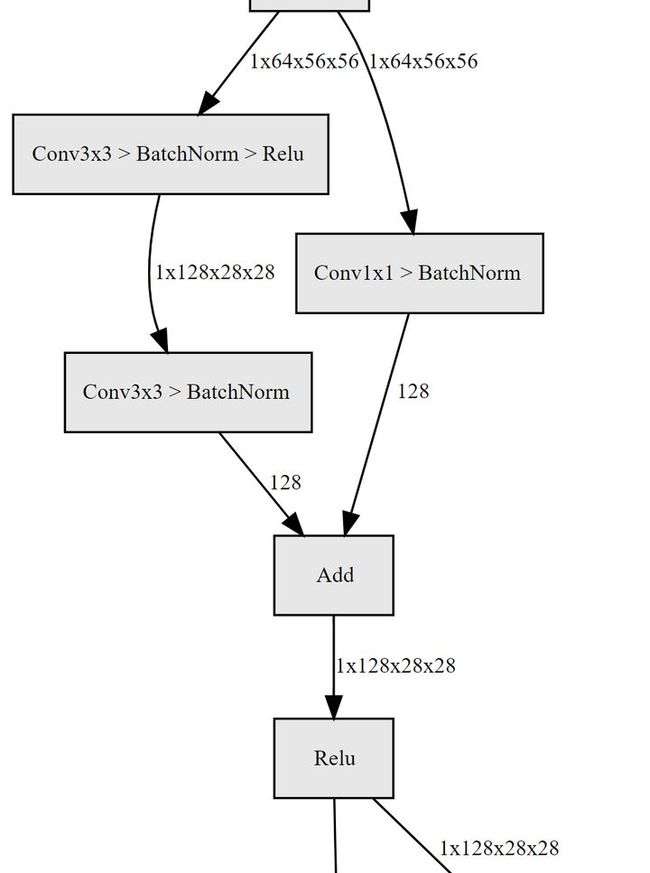
下面我们来具体看一下一个残差块是怎么实现的,如下图所示的basic-block,输入数据分成两条路,一条路经过两个3*3卷积,另一条路直接短接,二者相加经过relu输出,十分简单。
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
网络输出部分
网络输出部分很简单,通过全局自适应平滑池化,把所有的特征图拉成1*1,对于res18来说,就是1x512x7x7 的输入数据拉成 1x512x1x1,然后接全连接层输出,输出节点个数与预测类别个数一致。
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(512 * block.expansion, num_classes)
网络特点
整个ResNet不使用dropout,全部使用BN。此外:
- 受VGG的启发,卷积层主要是3×3卷积;
- 对于相同的输出特征图大小的层,即同一stage,具有相同数量的3x3滤波器;
- 如果特征地图大小减半,滤波器的数量加倍以保持每层的时间复杂度;
- 每个stage通过步长为2的卷积层执行下采样,而却这个下采样只会在每一个stage的第一个卷积完成,有且仅有一次。
- 网络以平均池化层和softmax的1000路全连接层结束,实际上工程上一般用自适应全局平均池化 (Adaptive Global Average Pooling);
从图中的网络结构来看,在卷积之后全连接层之前有一个全局平均池化 (Global Average Pooling, GAP) 的结构。
In this paper, we propose another strategy called global average pooling to replace the traditional fully connected layers in CNN. The idea is to generate one feature map for each corresponding category of the classification task in the last mlpconv layer. Instead of adding fully connected layers on top of the feature maps, we take the average of each feature map, and the resulting vector is fed directly into the softmax layer. One advantage of global average pooling over the fully connected layers is that it is more native to the convolution structure by enforcing correspondences between feature maps and categories. Thus the feature maps can be easily interpreted as categories confidence maps. Another advantage is that there is no parameter to optimize in the global average pooling thus overfitting is avoided at this layer. Futhermore, global average pooling sums out the spatial information, thus it is more robust to spatial translations of the input.
We can see global average pooling as a structural regularizer that explicitly enforces feature maps to be confidence maps of concepts (categories).This is made possible by the mlpconv layers, as they makes better approximation to the confidence maps than GLMs.
总结如下:
- 相比传统的分类网络,这里接的是池化,而不是全连接层。池化是不需要参数的,相比于全连接层可以砍去大量的参数。对于一个7x7的特征图,直接池化和改用全连接层相比,可以节省将近50倍的参数,作用有二:一是节省计算资源,二是防止模型过拟合,提升泛化能力;
- 这里使用的是全局平均池化,一些论文的**实验结果表明平均池化的效果略好于最大池化,但最大池化的效果也差不到哪里去。**实际使用过程中,可以根据自身需求做一些调整,比如多分类问题更适合使用全局最大池化(需试验)。
ResNet的常见改进
- 改进一:改进downsample部分,减少信息流失。
- 改进二:ResNet V2。论文地址:https://arxiv.org/abs/1603.05027