3.合宙Air32F103_USART_TIMER
一、简介
本章目的:在上一章已实现串口的基础上,添加定时器的功能。实现串口接收帧的时间间隔标志,当超过10ms没收到串口数据时处理当前已接收到的数据。
二、从例程移植
由于已经实现了串口的例程,只需要找到定时器的相关例程即可。
找到定时器工程的例程:
ModuleDemo\TIM\TIM_Basic\USER\TIM.uvprojx


三、移植
具体的移植过程,不再介绍了,将初始化和中断配置的部分复制过来就可以了。
3.1timer.c
在timer.c中包括定时器2和3初始化,使用串口3和串口配合实现时间间隔帧标志判断,串口2定时5秒定时发送欢迎语句。
| #include #include "timer.h" #include "delay.h" #include "usart.h" void TIM2_Int_Init(u16 arr,u16 psc) { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //时钟使能
//定时器TIM3初始化 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler = psc; //设置用来作为TIMx时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位 TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断 //中断优先级NVIC设置 NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //TIM2中断 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //从优先级3级 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能 NVIC_Init(&NVIC_InitStructure); //初始化NVIC寄存器 TIM_Cmd(TIM2, ENABLE); //使能TIMx // TIM_Cmd(TIM2, DISABLE); //使能TIMx } //通用定时器3中断初始化 //这里时钟选择为APB1的2倍,而APB1为36M //arr:自动重装值。 //psc:时钟预分频数 //这里使用的是定时器3! void TIM3_Int_Init(u16 arr,u16 psc) { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
//定时器TIM3初始化 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler = psc; //设置用来作为TIMx时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位 TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断 //中断优先级NVIC设置 NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能 NVIC_Init(&NVIC_InitStructure); //初始化NVIC寄存器 // TIM_Cmd(TIM3, ENABLE); //使能TIMx TIM_Cmd(TIM3, DISABLE); //使能TIMx } //定时器2中断服务程序 void TIM2_IRQHandler(void) //TIM2中断 { u8 st; st= TIM_GetFlagStatus(TIM2, TIM_FLAG_Update); if(st==SET) { TIM_ClearFlag(TIM2, TIM_FLAG_Update); printf("wuzjjj,07-11\r\n"); } } //定时器3中断服务程序 void TIM3_IRQHandler(void) //TIM3中断 { u8 st; st= TIM_GetFlagStatus(TIM3, TIM_FLAG_Update); if(st==SET) { TIM_ClearFlag(TIM3, TIM_FLAG_Update); //printf("wuzjjj\r\n"); USART1_RX_STA|=1<<15; //标记接收完成 TIM_Cmd(TIM3, DISABLE); //关闭TIM3 } } |
3.2usart.h
| #ifndef __TIMER_H__ #define __TIMER_H__ #include "sys.h" void TIM2_Int_Init(u16 arr,u16 psc); void TIM3_Int_Init(u16 arr,u16 psc); #endif |
3.3usart.c
usart.c中添加相关处理。每次接收到数据后,将定时器清零,将数据存到数组USART1_RX_BUF。第一次接收数据,需要使能定时器中断。
| void USART1_IRQHandler(void) //串口1中断服务程序 { u8 st,sbuf; st=USART_GetITStatus(USART1, USART_IT_RXNE); if(st==SET) // { sbuf=USART1->DR; // usart1_1_byte(sbuf); if((USART1_RX_STA&(1<<15))==0)//接收完的一批数据,还没有被处理,则不再接收其他数据 { if(USART1_RX_STA { TIM_SetCounter(TIM3,0);//计数器清空 //计数器清空 if(USART1_RX_STA==0) //使能定时器7的中断 { TIM_Cmd(TIM3,ENABLE);//使能定时器7 } USART1_RX_BUF[USART1_RX_STA++]=sbuf; //记录接收到的值 }else { USART1_RX_STA|=1<<15; //强制标记接收完成 } } } } |
3.4main.c
main.c中包括初始化等操作。将官方例程中的CLK打印封装到CLK_Printf中。
| #include #include #include #include "delay.h" #include "led.h" #include "usart.h" #include "timer.h" void CLK_Printf(void); int main(void) { int t=0; delay_init(); //延时初始化 uart1_init(115200); //串口1初始化 TIM3_Int_Init(10000-1,72-1); //定时器3初始化,10ms TIM2_Int_Init(10000-1,36000-1); //定时器2初始化,5000ms clear_usart1_buffer(); //清空串口1接受buffer
CLK_Printf(); //打印时钟频率
LED_GPIO_Init(); //LED闪烁
printf("wuzjjj\r\n"); //打印欢迎语句 while (1) { if(USART1_RX_STA&0x8000) //收到串口数据 { USART1_RX_STA = USART1_RX_STA&0x7FFF; //去掉标志位,剩下数据长度 printf("received,%d:",USART1_RX_STA); //发送辅助信息及收到的数据长度 printf("%s\r\n",USART1_RX_BUF); //将收到的数据发回 clear_usart1_buffer(); //清空串口1接受buffer }
if(t%200) //200ms执行一次LED控制 { LED_Set(t/200); //LED控制命令 } t++; //时间+1 delay_ms(1); //延时1ms } } void CLK_Printf(void) { RCC_ClocksTypeDef clocks; RCC_GetClocksFreq(&clocks); //获取系统时钟频率 printf("SYSCLK:%.1fMhz,HCLK:%.1fMhz,PCLK1:%.1fMhz,PCLK2:%.1fMhz,ADCCLK:%.1fMhz\r\n", (float)clocks.SYSCLK_Frequency/1000000,(float)clocks.HCLK_Frequency/1000000, (float)clocks.PCLK1_Frequency/1000000,(float)clocks.PCLK2_Frequency/1000000,(float)clocks.ADCCLK_Frequency/1000000); } |
四、调试
4.1下载程序
按照上一章的接线图,将A9 A10接到DAP-Link虚拟串口的A2 A3上。

4.2调试结果
复位后,打印当前的时钟频率,并且定时发送欢迎语句。
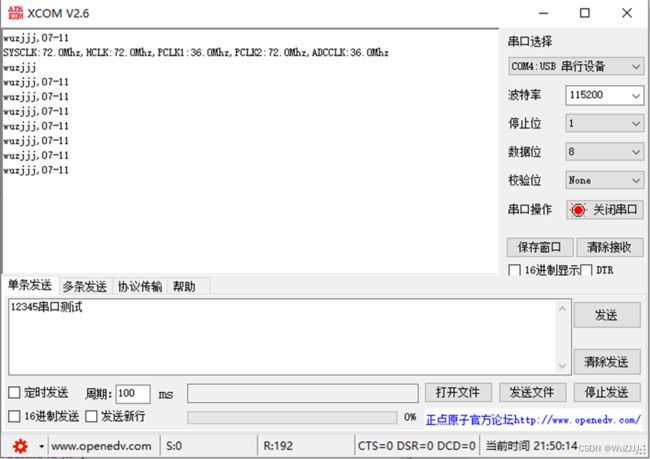
串口发送后将自动回复数据。
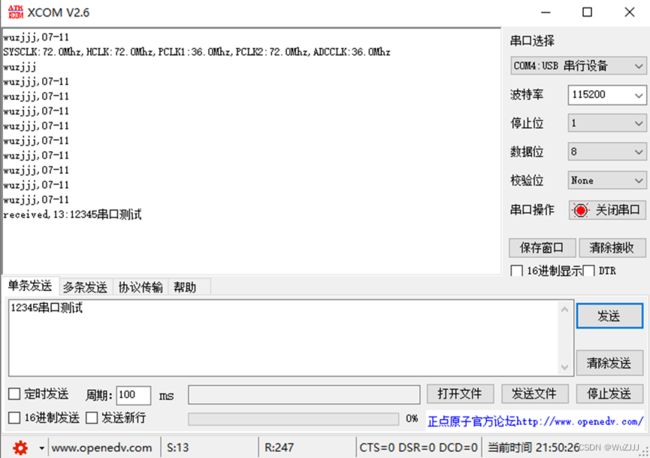 发回的数据是在主函数中,进行处理的。
发回的数据是在主函数中,进行处理的。
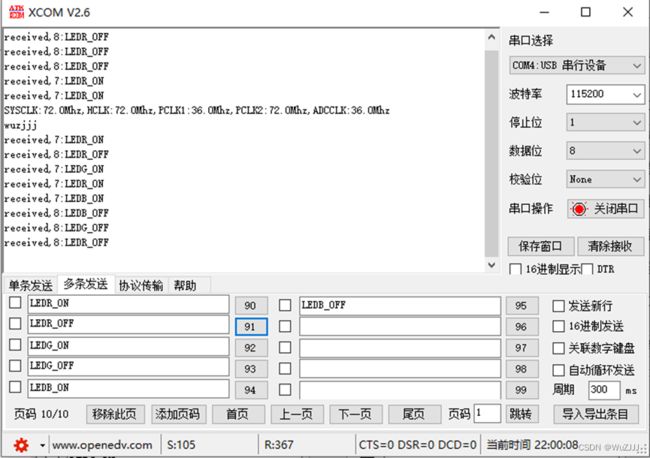
4.3控制LED
可以在处理的地方,添加对字符串的比较,对LED进行控制。
main.c
| #include #include #include #include "delay.h" #include "led.h" #include "usart.h" #include "timer.h" void CLK_Printf(void); int main(void) { delay_init(); //延时初始化 uart1_init(115200); //串口1初始化 TIM3_Int_Init(10000-1,72-1); //定时器3初始化,10ms // TIM2_Int_Init(10000-1,36000-1); //定时器2初始化,5000ms clear_usart1_buffer(); //清空串口1接受buffer
CLK_Printf(); //打印时钟频率
LED_GPIO_Init(); //LED闪烁
printf("wuzjjj\r\n"); //打印欢迎语句 while (1) { if(USART1_RX_STA&0x8000) //收到串口数据 { if(strcmp((char*)USART1_RX_BUF,"LEDR_ON")==0) LEDR_ON; else if(strcmp((char*)USART1_RX_BUF,"LEDR_OFF")==0) LEDR_OFF; else if(strcmp((char*)USART1_RX_BUF,"LEDG_ON")==0) LEDG_ON; else if(strcmp((char*)USART1_RX_BUF,"LEDG_OFF")==0) LEDG_OFF; else if(strcmp((char*)USART1_RX_BUF,"LEDB_ON")==0) LEDB_ON; else if(strcmp((char*)USART1_RX_BUF,"LEDB_OFF")==0) LEDB_OFF; USART1_RX_STA = USART1_RX_STA&0x7FFF; //去掉标志位,剩下数据长度 printf("received,%d:",USART1_RX_STA); //发送辅助信息及收到的数据长度 printf("%s\r\n",USART1_RX_BUF); //将收到的数据发回 clear_usart1_buffer(); //清空串口1接受buffer } } } void CLK_Printf(void) { RCC_ClocksTypeDef clocks; RCC_GetClocksFreq(&clocks); //获取系统时钟频率 printf("SYSCLK:%.1fMhz,HCLK:%.1fMhz,PCLK1:%.1fMhz,PCLK2:%.1fMhz,ADCCLK:%.1fMhz\r\n", (float)clocks.SYSCLK_Frequency/1000000,(float)clocks.HCLK_Frequency/1000000, (float)clocks.PCLK1_Frequency/1000000,(float)clocks.PCLK2_Frequency/1000000,(float)clocks.ADCCLK_Frequency/1000000); } |
编译后下载程序,使用串口助手发送如下命令,即可完成对LED的控制。