c++实现超声回波包络检测_几种常见的超声波检测
超声波方法分类
1.按检测方法原理:分为脉冲反射法、衍射时差法、穿透法和共振法;
2.按波型:分为纵波、横波、表面波、板波和爬波;
3.按显示方法:A显示和超声成像显示;
4.按耦合方式:分为直接接触法、液浸法和电磁耦合法;
5.按探头个数:分为单探头法、双探头法和多探头法;
6.按人工干预程度:手工检测和自动检测。
1
检测方法原理
按检测方法原理可以分为:
①脉冲反射法(缺陷回波法、底波高度法、多次底波法);
②衍射时差法;
③穿透法;
④共振法。
常规检测应用最多的是脉冲反射法中的缺陷回波法,衍射时差法(TOFD)是目前大力推广的一种对缺陷检测有较高捡出率的可连续记录的超声检测技术。穿透法较少应用。共振法只在老式测厚仪中用过,目前不再采用。
脉冲反射法
探头发射脉冲波检测工件,接收缺陷回波或工件底波变化进行检测的方法。
01 缺陷回波法
利用缺陷反射波的幅度和位置来评价缺陷(定位、定量),操作简便,灵敏度高。
02 底波高度法
依据底波高度变化来判断工件中缺陷大小的方法。
采用的方法有:F/BF法、 F/BG法、 BG/BF法 。
特点是:不存在盲区,同样投影大小的缺陷可以得到同样的指示。
a)要求检测面与底面平行;
b)不能对缺陷准确定量;
c)检测灵敏度低;
d)对于倾斜的缺陷,小而密集的缺陷、吸收的缺陷用BG/BF(锻件、钢板缺陷的评定采用的方法)。
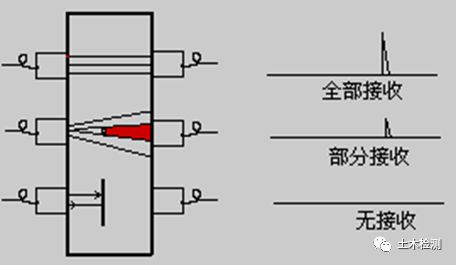
03 多次底波法
依据多次底波变化的情况来判断工件中有无缺陷的方法。
当透入试件的超声波能量较大,而试件厚度较小时,超声波可在探测面与底面之间往复传播多次,示波屏上出现多次底波B1、B2、B3……。如果试件存在缺陷,则由于缺陷的反射以及散射而增加了声能的损耗,底面回波次数减少,同时也打乱了各次底面回波高度依次衰减的规律。可用于材质晶粒度和石墨化程度的评定。![]()

衍射时差法(TOFD)
01 检测原理
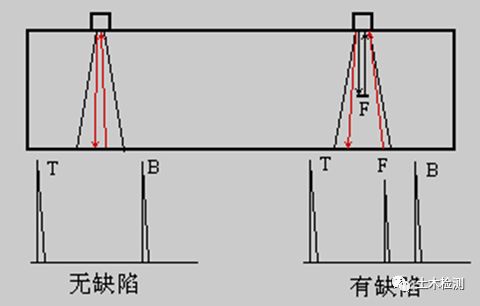
是一种依靠从待检工件内部缺陷上、下“端点”处得到的衍射波在扫描线上的时差来检测缺陷尺寸的方法。通常使用纵波斜探头,采用一发一收的模式。

a)无缺陷:发射超声波→接收(直通波→底面反射波→变形波等)。
b)有缺陷:发射超声波→接收(直通波→上端点衍射波→下端点衍射波→底面反射波→变形波等。)
TOFD显示:A扫描信号+TOFD图象
02 检测设备
1)仪器:单通道(≤50mm)或多通道、具有数据连续自动采集、记录、显示和分析功能。
2)探头:采用小晶片、大扩散角(3-20mm,45~700);高频率(1~15MHz);宽频带、窄脉冲。
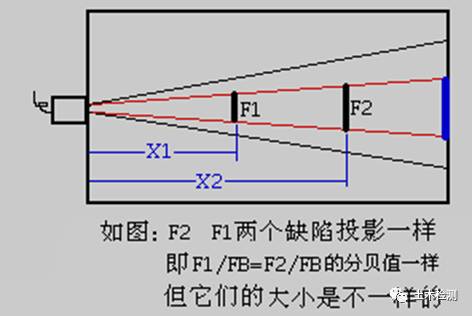
03 缺陷埋藏深度的测定

![]()
![]()
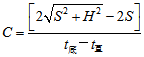
可以通过直通波和底面反射波的位置来求出波速C和探头的延时t0,这种方法有助于减小因对称性偏差引起的误差。
注:直通波的时间:![]()
底面反射波的时间:![]()
将上述公式转换:即可求出声速c和探头在斜楔中的延时t0
![]()
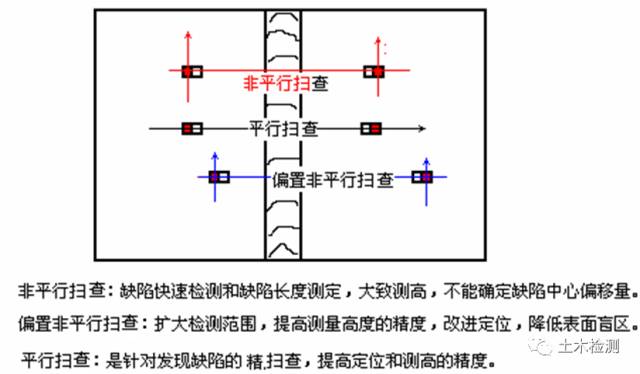
04 TOFD扫查方式
05 TOFD图象
TOFD图象是将每个A扫描信号显示成一维图象线条,位置对应声程、灰度对应幅度;将若干A扫描信号图象线条沿探头移动方向拼成二维图象;一个轴表示探头移动距离,另一个轴表示扫查面至底面的深度。以上构成TOFD图象。
【TOFD图象请上下滑动查看】
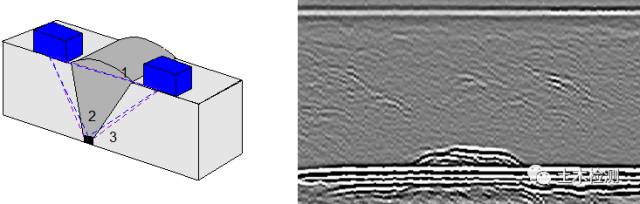
a)近表面裂纹

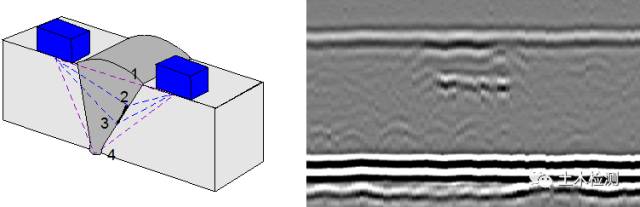
b)中间未焊透

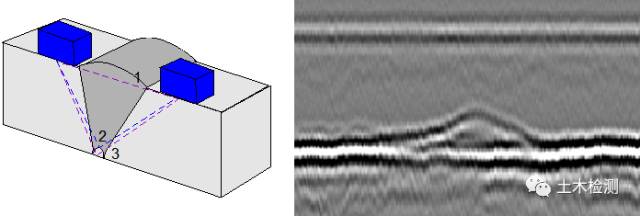
c)根部未焊透
d)侧壁未熔合
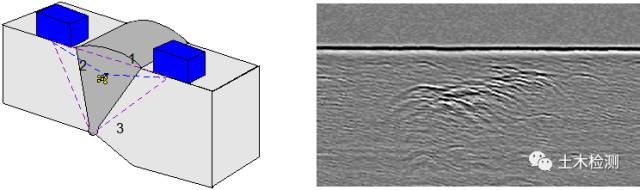
e)气孔
f)横向裂纹

g)根部内凹
06 TOFD检测的优点
a)可靠性好。由于衍射信号不受声束角度影响,任何方向的缺陷都能有效发现。国外通过试验对缺陷检出率的评价是:
手工UT:40-60%;RT-γ:55~60% RT-X:55~65%
UT机械:55-85%;TOFD:75-85%;机械+TOFD:80-95%
b)定量精度高。采用衍射时差技术对缺陷定量,精度远远高于常规手工超声波检测。一般认为,对线性缺陷或面积型缺陷,TOFD定量误差小于1mm。对裂纹和未熔合缺陷高度测量误差通常只有零点几毫米。
c)TOFD检测简便快捷。最常用的非平行扫查只需一人即可以操作,探头只需沿焊缝两侧移动即可,不需做锯齿扫查,检测效率高,操作成本低。
d)TOFD图象包含丰富的信息,有利于缺陷的识别和分析。
e)能够全过程记录,长久保存数据。
07 TOFD检测的局限性
a)对近表面缺陷的检测可靠性不够:对上表面缺陷,可能隐藏在直通波下而漏检,该区域缺陷即使被检出其测量精度也不高。对下表面缺陷,其信号有可能被底面反射信号淹没而漏检。
b)对缺陷定性比较困难:TOFD技术比较有把握区分上表面开口、下表面开口及埋藏缺陷,但不能准确判断缺陷性质。
c)TOFD图像识别和判读比较难:数据分析需要丰富的经验。
d)对粗晶材料,如奥氏体焊缝检测比较困难,信噪比较低。
e)横向缺陷检测比较困难。
f)复杂几何形状的工件检测比较困难。
g)点状缺陷的尺寸测量不够准确。
穿透法
探头在工件两对侧一发、一收,利用缺陷遮挡声束的多少来判断缺陷的大小。
优点:无盲区,可探测薄的工件,传播路径短、衰减小。
缺点:缺陷不能定位,检测灵敏度低、小缺陷易漏捡。
共振法
当工件的厚度是入射波l/2的整数倍时,发生共振。用于工件厚度测量(老式测厚仪)。
2
波型
纵波
特点:波长l大,衰减小、穿透能力强、可检测厚度大,并能对粗晶材料进行检测。
纵波直探头:检测平行于表面或与表面倾角很小方向的缺陷。适用于钢板、锻件、铸件等的检测。
纵波斜探头:入射角< αI(27.60)
a)小角度纵波斜探头(特点是检测深度大,探头移动范围小)用于检测螺栓、螺柱的齿根裂纹,多层包扎环焊缝的缺陷。
b)K1 纵波斜探头(或K1聚焦 纵波斜探头)可用来检测奥氏体不锈钢焊缝,用K1点聚焦 纵波斜探头易于激发端点衍射,可用于裂纹测高。
5MHz 8.50 (K1.5)纵波斜探头检测螺拄齿根裂纹:

横波
特点:波长l小,衰减快、穿透能力差、不适用粗晶材料。
产生方法:aII>入射角aL>aI
a)直接接触法:入射角aL应在57.70 ~27.60之间
b)水浸法:入射角aL应在14.50 ~27.270之间
应用:
斜入射,检测与表面有一定倾角方向的缺陷。用于焊缝和钢管的检测,以及厚的钢板和锻件的辅助检测。
表面波
特点:在表面2l内传播,遇到表面不连续的部位(开口裂纹、棱边)会产生反射、波形转换等。
产生方法:
a)Y切石英法:可以两个方向发射,通常用阻尼材料衰减其中一个方向。
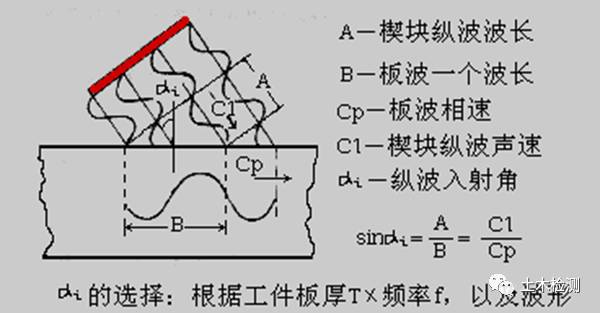
b)纵波折射法:![]()
有机玻璃/钢:αi=620~640 (由于近场长度不超出楔块长度,不影响检测)

应用:表面开口裂纹高度测定
a)强度法:反射回波随深度增加而升高,只适用裂纹深度小于2λ的情况。
b)时延法:
①单探头法:

②双探头法:

应用中的有关问题:
a)扫描比例1:1
调试方法:
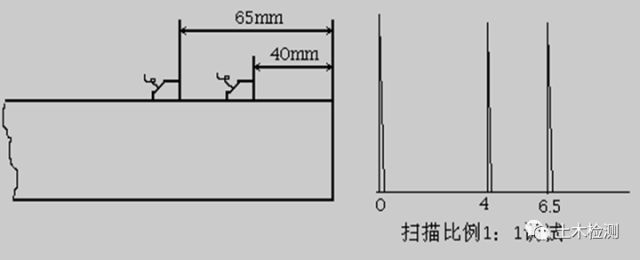
b)频率选用5MHz;耦合剂多采用甘油或较粘的机油。
c)检测灵敏度调节:将距40mm棱边波调到基准波高-21dB相当于长6.5mm、高0.1mm平面裂纹。
d)表面较厚的油层、污物 、铁锈、水垢、以及 粗糙的表面均会造成表面波的严重衰减。因此表面光洁度比一般的检测方法要高一些,露出金属光泽,并用有机溶剂擦干净。
板波
特点:在薄板、薄管内传播。充塞整个工件,可以发现内部和表面缺陷。捡出灵敏度取决于仪器工作条件和板波的形式。
产生方法:
应用:主要用于薄板(≤6mm),薄壁管等形状简单的工件捡测。
应用中的有关问题:
1)检测距离大时,应选择以纵波成分为主的板波型;
2)捡测复合板粘结不良时,应选择以横波成分为主的板波波型;
3)板上油、水使板波衰减增大,因此水浸法捡测时应选择以纵波成分为主的板波波型(群速接近纵波的波型)。
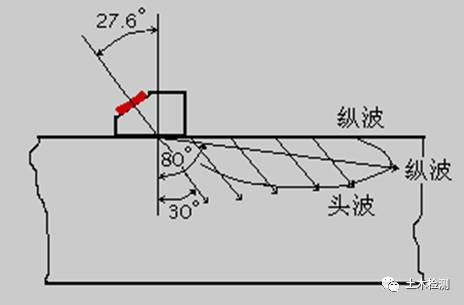
爬波
特点:沿工件表面下一定距离处在横波和表面纵波之间传播的峰值波称为纵向头波或爬波。或者简单说,叫表面下纵波(且有一定的横波分量)。波速在圆弧面上≈0.96纵波速度。
爬波受工件表面的刻痕、不平整、凹陷,以及油滴干扰较小,因此有利检测粗糙表面下的缺陷。
产生方法:当纵波以第一临界角27.60附近,±30以内入射,即可获得爬波。
应用:主要用于铸件、堆焊层等的表面下裂纹,以及螺栓拄根部裂纹检测。
应用中的有关问题:
1)通过选择探头的f.D值可以改变对表面附件缺陷的敏感程度, f.D大,探测深度小。
2)爬波离开探头后衰减很快,P∝1/X4,检测距离只有几十毫米,通常采用双探头布置。
3
A型显示和超声成像
A型显示
是一种波形显示,用直角坐标的纵坐标代表幅度,横坐标代表时间。
超声成像
分为B、C、D、S、P显示等。
① B显示:纵截面显示
②C显示:横截面(投影)显示
③D显示:侧截面显示
④ P显示:C显示+ D显示在焊缝检测上应用的 商品化成像系统。
相控阵和S扫描
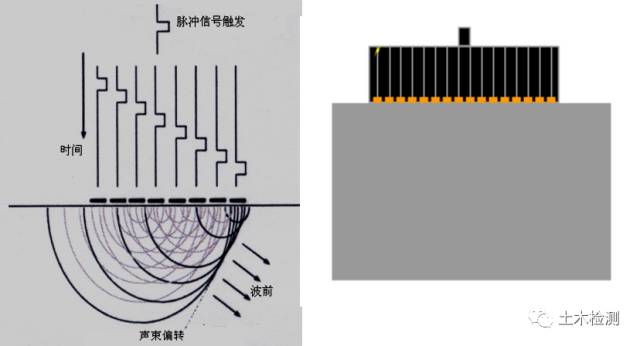
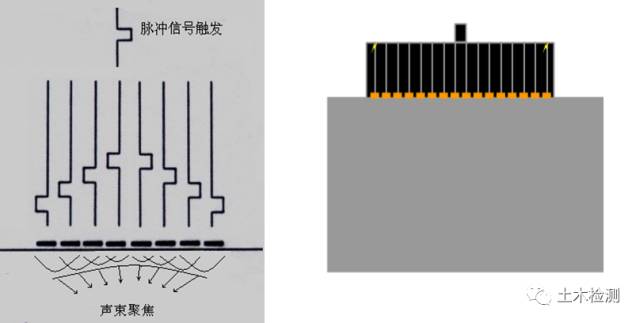
a)基本原理:超声相控阵检测是一种多声束扫描成像技术。检测探头是由多个晶片组成的阵列,通过控制对各阵元触发脉冲的时间延时,改变各阵元发射声波到达某点的相位关系,就可实现声束聚焦点和声束方位的变化,从而进行扫描成像。
b)相控阵探头:由多个小晶片组成,其每一个晶片均可独立激发。探头晶片阵元的形式有线阵和环形面阵两种。
c)相控阵仪器:与探头阵元数相匹配的多通道检测仪,由软件控制触发脉冲的延时、相位。
d)声束偏转:改变每个阵元(小晶片)延时间隔,使得其合成波阵面具有一定倾角,实现声束偏转。
e)声束聚焦:使两端的阵元先触发,逐渐向中央延时触发,其合成的波阵面就具有一定的曲率,并指向圆心,实现了聚焦;改变延时时间就可以调整聚焦远近。
4
耦合方式
直接接触法
探头与工件之间有一层薄薄的耦合剂(d«l/4),最佳压力为10~20N时耦合稳定,效果好。
特点:操作简便、灵敏度高、适用于手工操作。
缺点:探头易磨损,工件表面粗糙度应控制在6.3μm 以内。
液浸法
a)分类:全浸式;局部液浸式(喷液式、通水式、满溢式)。
b)特点:
耦合稳定(不受工件表面粗糙度的影响);探头不会磨损;盲区小(水钢界面波的宽度小于始脉冲宽度);
声能损失较大、水钢界面声压透过率只有20%,水浸检测时必须提高检测灵敏度约10dB。调整探头的入射角,可获得任意角度的横波,由于声束扩散,常使用水浸聚焦探头。加表面活性剂润湿工件,必要时,适当对水加热,去除水中的气泡,防止杂波。
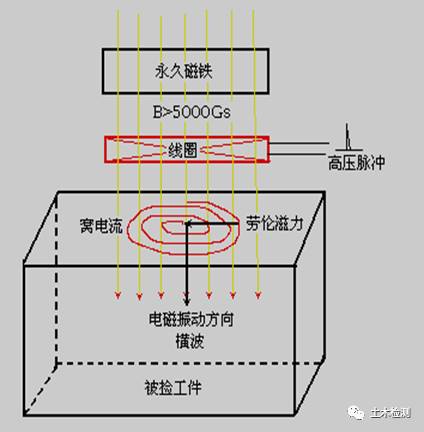
电磁耦合(EMAT)
利用电磁超声探头激发和接收超声波的技术。
原理:基于铁磁材料在磁化的过程中(磁畴之间的界限发生移动而产生机械变形)产生磁致伸缩效应-发射超声波;反之,当外力作用,使铁磁性材料磁化强度变化的现象称为逆磁致伸缩效应-接收超声波。
电磁超声的激发和接收:
![]()
电磁超声检测的特点:
a)探头不用与工件接触,不需要耦合剂,因此对工件表面要求低,粗糙表面不必进行处理。
b)探头与工件有一定距离,可进行高温在线检测。
c)检测速度快,适用连续生产线自动化检测。
d)缺陷检出灵敏度低于常规超声检测。
5
探头的数目
单探头法
用一个单探头发射和接收超声波。优点:操作简便;可检测出大多数缺陷。缺点:盲区较大,如果收不到回波缺陷将漏检。
双探头法
一个单探头发射,另一个单探头接收。对单探头检测可能产生漏检的补充。
a)并列:可发现与检测面倾斜的缺陷。
b)交叉:可发现与检测面垂直的缺陷(如焊缝检测横向缺陷)。
c)串列:
V串-可发现与检测面平行的缺陷;
K串-可发现与检测面垂直的缺陷;
前后串-可发现与检测面垂直的缺陷(如厚焊缝的未焊透和坡口未熔合)。

多探头法
用于多通道检测仪,多个探头交替工作,相当于多个单通道检测仪,如:钢板自动化检测、相控阵检测等。
6
按人工干预程度
按人工干预程度
操作简便;受操作者影响大:技术水平、责任心、情绪;检测结果的可靠性和重复性差。
自动检测
能够自动记录探头位置和有关检测数据或有能够固定探头进行自动扫除的装置均称为自动检测。国外自动超声检测技术有逐渐替代射线检测的趋向。

