ros中python3与cv_bridge问题
ROS——在Ubuntu18.04下基于ROS Melodic编译python3的cv_bridge
环境
- Ubuntu18.04
- python3.6.13
- ROS Melodic
- nvidia xavier
1.安装环境
sudo apt-get install python3-dev python3-numpy python3-yaml ros-melodic-cv-bridge python3-rospkg-modules
pip3 install pip --update
pip3 install rosdep rosinstall catkin_pkg2.基于python3环境编译cv_bridge
(1)初始化cv_bridge_ws编译工作空间
mkdir -p cv_bridge_ws/src && cd cv_bridge_ws/src
catkin_init_workspace(2)将cv_bridge源码拉取到本地
git clone https://github.com/ros-perception/vision_opencv.git(3)编译cv_bridge
cd ../
catkin_make install -DPYTHON_EXECUTABLE=/usr/bin/python3编译报错解决
问题1:
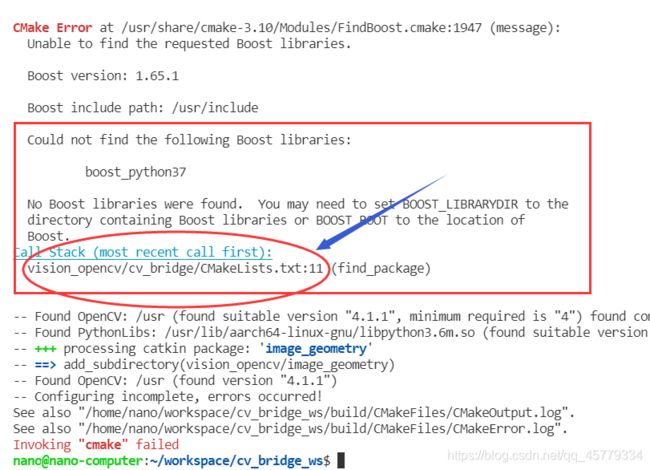
解决方法:
1. 查看你的libbost_python*文件(我这里的arm的ubuntu,如果你的是x86,就在/usr/lib/x86-64-linux-gnu这个文件夹)
cd /usr/lib/aarch64-linux-gnu/
ls libboost_python*
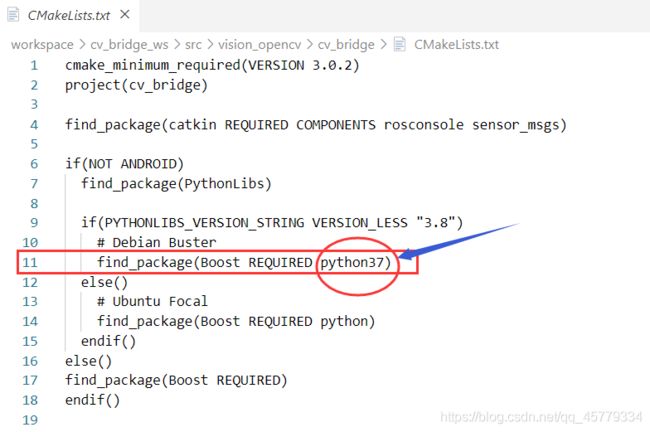
2. 进入报错文件vision_opencv/cv_bridge/CMakeLists.txt,将11行的python37改成python3,然后重新编译即可。
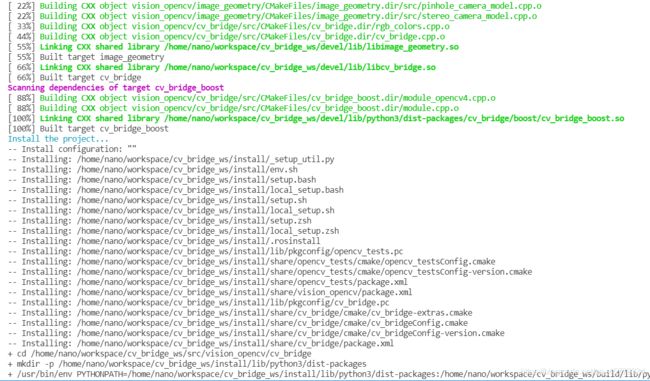
(4)编译成功
(5)将编译生成的文件加入环境变量
使我们在使用python3时可以,默认调用:(这里一定要改成自己的编译后的路径!!)
source /home/nvidia/AGV/cv_bridge_ws/install/setup.bash --extend
将其添加至.bashrc文件的最后一行
(6)测试
重新打开一个终端:运行python3
import cv_bridge
from cv_bridge.boost.cv_bridge_boost import getCvType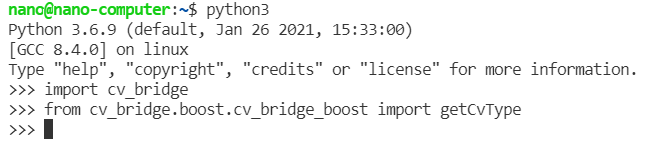
如果报错,记得source
source /home/nvidia/AGV/cv_bridge_ws/install/setup.bash --extend
都import成功说明已经成功编译了基于python3的cv_bridge,现在就可以直接在ROS中编写python3的代码即可,节点会自动调用对应python版本的cv_bridge!
--------------------------------------------------------------------------------------------------------------------------------
--------------------------------------------------------------------------------------------------------------------------------
上述过程可以通过python+文件名运行节点,但是通过rosrun报错
source ./devel/setup.bash && rosrun image_processing image_process.py
python src/image_processing/scripts/image_process.py