ROS 学习笔记(11)—— tf 坐标系广播与监听的编程实现
tf 坐标系广播与监听的编程实现
-
- 步骤一:创建新的功能包
- 步骤二:编写 cpp 代码
- 步骤三:配置 CMakeLists.txt 的编译规则
- 步骤四:编译并运行
步骤一:创建新的功能包
回到/catkin_ws/src文件夹下,创建一个新的功能包,名为learning_tf:
catkin_create_pkg learning_tf roscpp rospy tf turtlesim
步骤二:编写 cpp 代码
tf 广播器代码:
在/catkin_ws/src/learning_tf/src/目录下新建turtle_tf_broadcaster.cpp文件,把以下代码复制进去:
/**
* 该例程产生tf数据,并计算、发布turtle2的速度指令
*/
#include tf 监听器代码:
在/catkin_ws/src/learning_tf/src/目录下新建turtle_tf_listener.cpp文件,把以下代码复制进去:
/**
* 该例程监听tf数据,并计算、发布turtle2的速度指令
*/
#include 步骤三:配置 CMakeLists.txt 的编译规则
与之前一样,需要配置 CMakeLists.txt 的编译规则:
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})

步骤四:编译并运行
在catkin_ws文件夹下,输入catkin_make命令进行编译,在/catkin_ws/devel/lib/learning_tf目录下可以看到turtle_tf_broadcaster以及turtle_tf_listener文件,说明编译成功。
依次输入以下指令运行:
roscore
rosrun turtlesim turtlesim_node
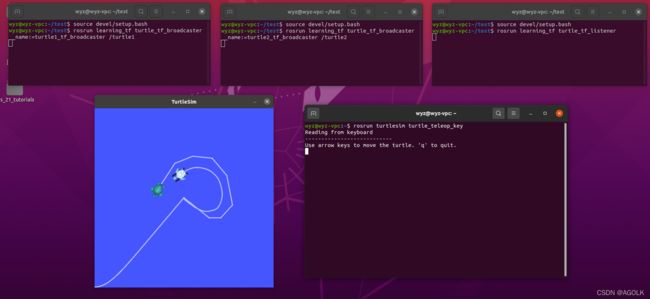
rosrun learning_tf turtle_tf_broadcaster __name:=turtle1_tf_broadcaster /turtle1
rosrun learning_tf turtle_tf_broadcaster __name:=turtle2_tf_broadcaster /turtle2
rosrun learning_tf turtle_tf_listener
rosrun turtlesim turtle_teleop_key
看到以下效果证明已经成功: