【图卷积网络】02-谱域图卷积介绍
注:本文为第2章谱域图卷积介绍视频笔记,仅供个人学习使用
目录
- 1、图卷积简介
-
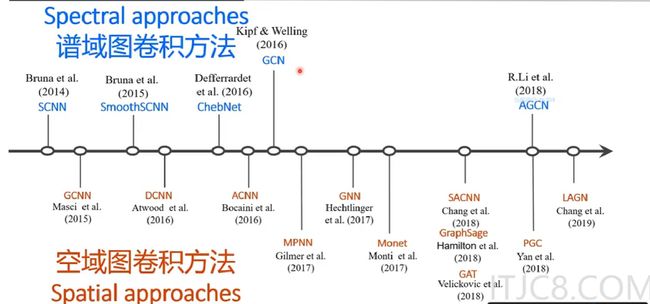
- 1.1 图卷积网络的迅猛发展
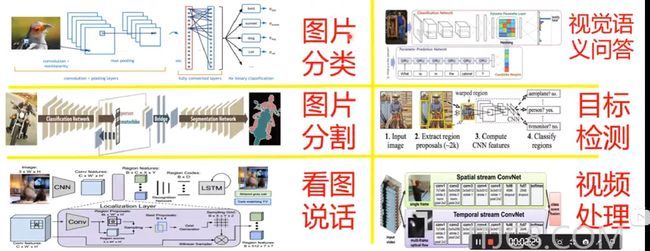
- 1.2 回顾,经典卷积神经网络已在多个领域取得成功
- 1.3 两大类数据
- 1.4 经典卷积神经网络的局限:无法处理图数据结构
- 1.5 将卷积扩展到图结构数据中
- 2、图谱卷积背景知识
-
- 2.1 谱域图卷积实现思路
- 2.2 拉普拉斯矩阵
-
- 2.2.1 拉普拉斯算子
- 2.2.2 拉普拉斯矩阵
- 2.3 图傅里叶变换
- 2.4 图卷积定理
- 3、三个经典图谱卷积模型
-
- 3.1 SCNN
- 3.2 ChebNet
- 3.3 GCN
1、图卷积简介
1.1 图卷积网络的迅猛发展
-
16年以前,每年只有1-2篇相关文献
-
18年,有些会议上大概有了7-8篇
-
19年,文章数量爆炸性增长,仅仅NIPS一个会议就有49篇文章
1.2 回顾,经典卷积神经网络已在多个领域取得成功
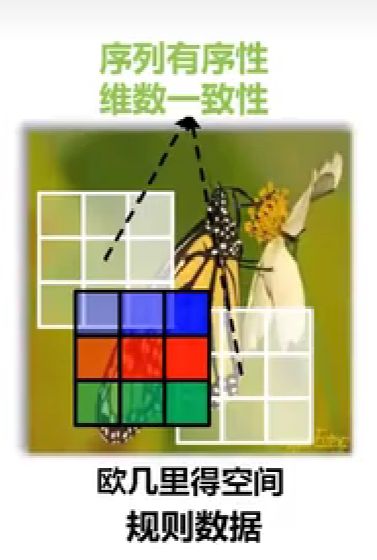
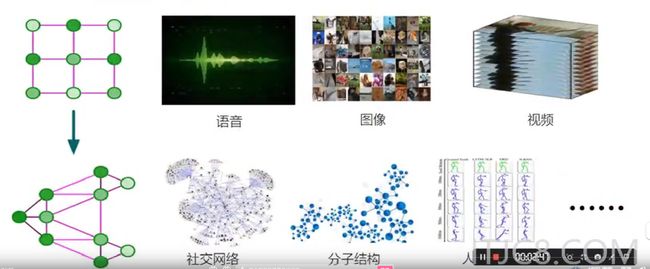
1.3 两大类数据
| 规则数据(欧氏空间) | 不规则数据(非欧氏空间) |
|---|---|
 |
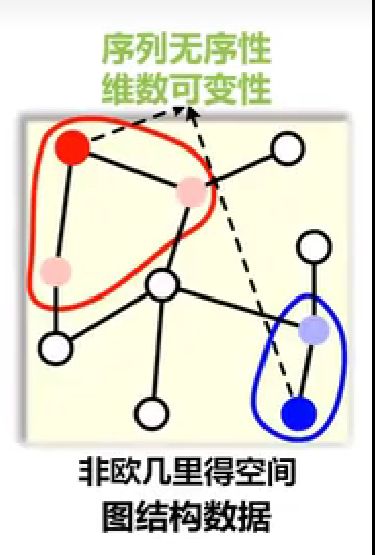 |
| 语音:一维向量;图像:二维矩阵;视频:三维矩阵 | 社交数据 、分子结构 、人体骨架 |
1.4 经典卷积神经网络的局限:无法处理图数据结构
经典卷积处理图结构数据的局限:
- 只能处理固定输入维度的数据
- 局部输入必须有序
1.5 将卷积扩展到图结构数据中
- 频域:指将信号转换为频率的域,通过对频率的分析来研究信号的频率特性。常用的转换方法是使用傅里叶变换。在频域中,信号可以表示为各个频率分量的相对强度。
- 谱域:指将信号转换为能量或功率的域,通过对能量或功率的分析来研究信号的能量或功率分布。常用的转换方法是使用功率谱密度函数。在谱域中,信号可以表示为各个频率分量的能量或功率。
- 空域:指将信号转换为空间坐标的域,通过对空间坐标的分析来研究信号的空间特性。在空域中,信号可以表示为在不同空间位置上的强度。
- 时域:指将信号转换为时间坐标的域,通过对时间坐标的分析来研究信号的时间特性。在时域中,信号可以表示为在不同时间上的变化。
谱域图卷积
-
根据图谱理论和卷积定理,将数据由空域转到谱域做处理
-
有较为坚实的理论基础
空域图卷积
- 不依靠图谱卷积理论,直接在空间上定义卷积操作
- 定义直观,灵活性强
部分经典模型
2、图谱卷积背景知识
2.1 谱域图卷积实现思路
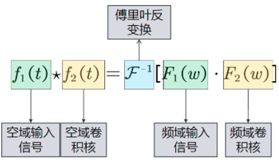
根据卷积定理,两信号在空域(或时域)卷积的傅里叶变换等于这俩个信号在频域中的傅里叶变换的乘积:

也可以通过反变换的形式来表达:
![]()
f1(t) 定义为空域输入信号,f2(t)定义为空域卷积核,卷积操作即为:先将空域上的信号f1(t)转换到频域信号F1(w),f2(t)转换到频域F2(w),然后将频域信号相乘,再将相乘后的结果通过傅里叶反变换转回空域,这个就是谱域图卷积的实现思路(将空域转换到频域上处理,处理完再返回)。
经典的卷积操作具有序列有序性和维数不变性的限制,使得经典卷积难以处理图数据,对于一个3x3的卷积核,它的形状是固定的,它的感受野的中心节点必须要有固定的邻域大小才能使用卷积核,但是图上的节点的领域节点是不确定的,此外图上节点的领域节点也是没有顺序的,这就不能直接在空域使用经典的卷积。但是当把数据从空域转换到频域,在频域处理数据时,只需要将每个频域的分量放大或者缩小就可以了,不需要考虑信号在空域上存在的问题,这个就是谱域图卷积的核心。
经典傅里叶变换:

基于图谱理论,可以使用图傅里叶变换。

2.2 拉普拉斯矩阵
2.2.1 拉普拉斯算子
拉普拉斯算子△ 的定义为梯度gradient▽的散度divergence▽·。即Δf=▽·(▽f) = div(grad(f))。
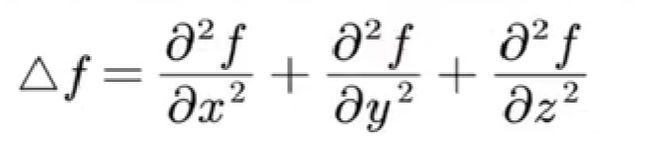
对于n维欧式空间,可普遍认为拉普拉斯算子是一个二阶微分算子,即在各个维度求二阶导数后求和。
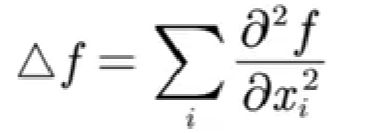
在3维欧氏空间,对于一个三元函数f(x,y,z),可以得到
离散情况下欧氏空间的拉普拉斯算子 ,对于两个变量的函数f(x,y)
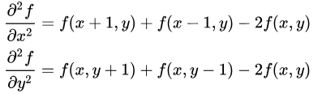
那么两个变量的离散拉普拉斯算子可以写成:

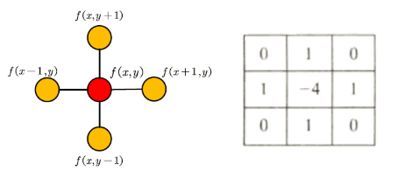
二维的拉普拉斯算子可以理解为中心节点与周围节点的差值,然后求和。如下图,对于某个中心像素(红色)的算子为周围四个像素之和减去4倍的自己。
类似,在图上的拉普拉斯算子定义:
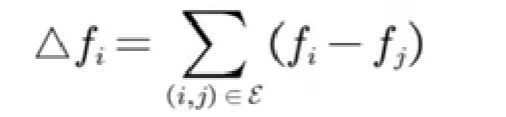
其中,f = (f1, f2, ···, fn),代表n个结点上每个结点的信号。
当有权重时:
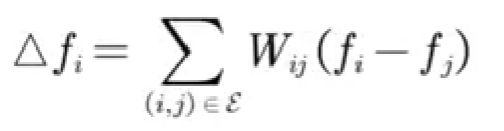
可以理解为中心节点依次减去周围节点,乘以权重后,然后求和。

对于n个节点有:

2.2.2 拉普拉斯矩阵
拉普拉斯矩阵是图上的一种拉普拉斯算子。
D为度矩阵,它对角线上的值是从 i 节点出发的所有边的权重之和(nxn的方阵,是对角矩阵)。
拉普拉斯矩阵(L)是度矩阵(D)减去邻接矩阵(W),即L = D - W。
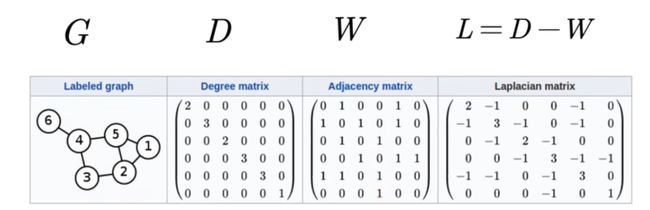
- 性质:拉普拉斯矩阵是对称半正定矩阵,因此该矩阵的特征值一定非负,一定有n个线性无关的特征向量,它们是n维空间中的一组标准正交基,组成正交矩阵。
特征分解(Eigen decomposition),又称谱分解(Spectral decomposition),是将矩阵分解为由其特征值和特征向量表示的矩阵之积的方法。

L是拉普拉斯矩阵,U是拉普拉斯矩阵特征向量组成的矩阵,λ是特征向量,组成对角阵∧。
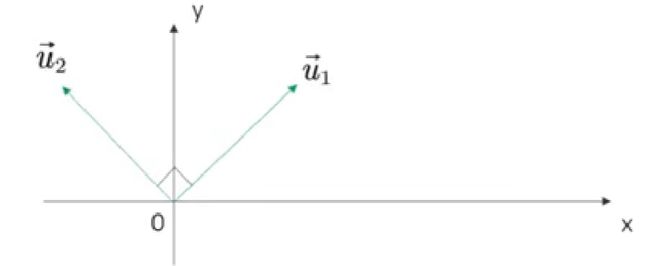
拉普拉斯矩阵有n个线性无关的特征向量,可以组成n维线性空间中的一组基。

又因为对称矩阵的不同特征值对应的特征向量相互正交,这些正交的特征向量构成的矩阵为正交矩阵。所以拉普拉斯矩阵的n个特征向量是n维空间中的一组标准正交基。
2.3 图傅里叶变换
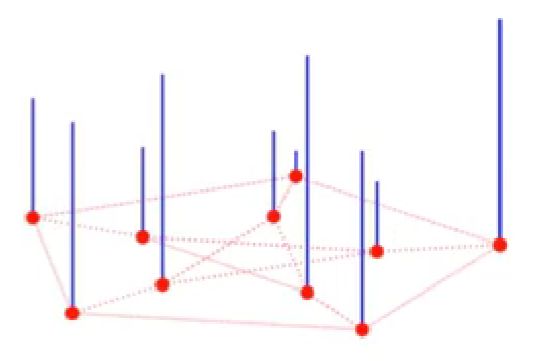
图上信号的定义:一般表达为一个向量。假设有n个节点,将图上的信号记为:
每一个节点上有一个信号值,节点i上的值为x(i) = xi
下图中蓝色线段代表信号的大小,类似于图像上灰度图像像素,像素越高,画的这个线段越长。
经典傅里叶变换如下
- 傅里叶正变换F:求线性组合的系数。具体做法是由原函数和基函数的共轭的内积求得。
- 傅里叶反变换f:一个信号由不同频率的基函数信号叠加而成,即把任意一个函数表示成了若干个正交基函数的线性组合。
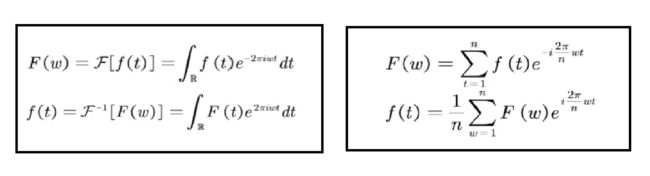
左边为连续空间中的傅里叶变换,右边为离散傅里叶变换。
傅里叶变换的本质是内积,三角函数是完备的正交函数集,不同频率的三角函数的之间的内积为0,只有频率相等的三角函数做内积时,才不为0。
参考自 一文道破傅里叶变换的本质,优缺点一目了然

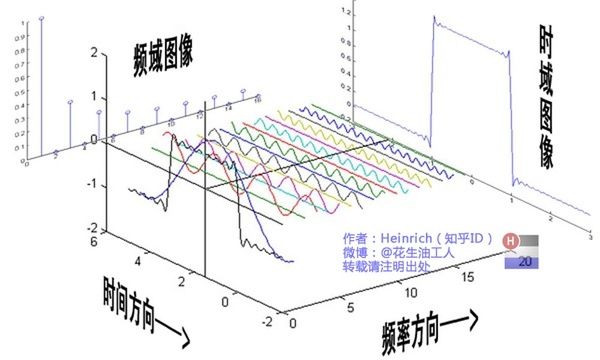
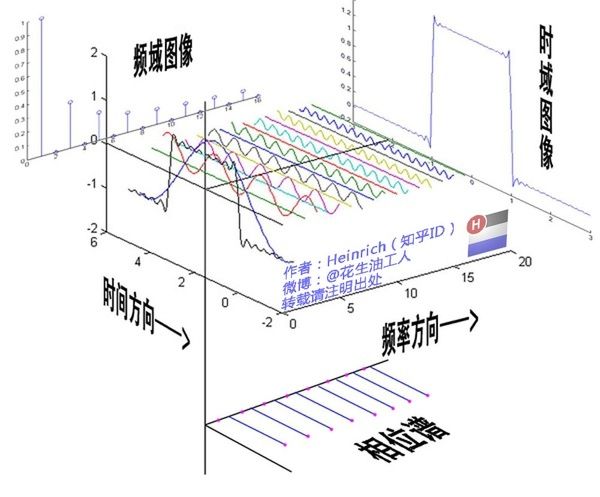
经典傅里叶变换:一个信号由不同频率的基函数信号叠加而成。左图中红色信号是原信号,蓝色信号是不同频率上的基函数信号(余弦或者正弦函数)。则红色原信号可以由不同频率的基函数线性组合而成,右图蓝色的高度表示基前面的系数,也就是所谓的傅里叶系数,也就是原函数在这个基上的坐标分量。
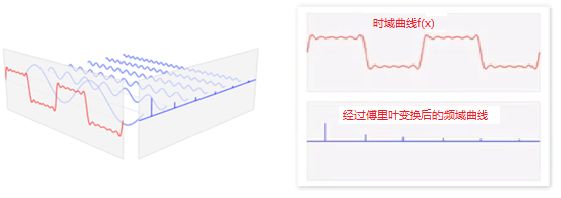
相位在图中被忽略了,实际上的傅里叶系数包含振幅和相位。
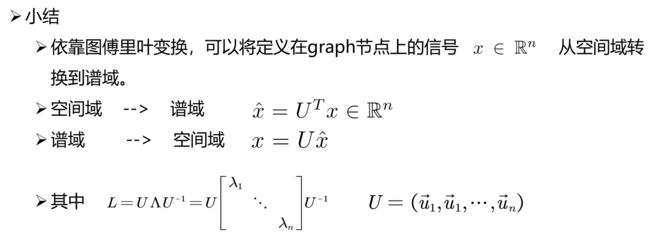
对应经典傅里叶变换的思想,对于图上信号x的傅里叶变换,希望找到一组正交基,通过这组正交基的线性组合来表达x。而拉普拉斯矩阵的特征向量正好是正交的,可以作为图傅里叶变换的基函数。

则傅里叶逆变换可以将图上的信号可以表示为:

小结:依靠图傅里叶变换可以将定义在图上结点上的信号x从空间域与转到谱域。
| 经典傅里叶变换 | 图傅里叶变换 |
|---|---|
 |
 |
基: |
基: |
频率: |
频率”: |
分量的振幅(和相位):  |
分量的振幅: |
2.4 图卷积定理
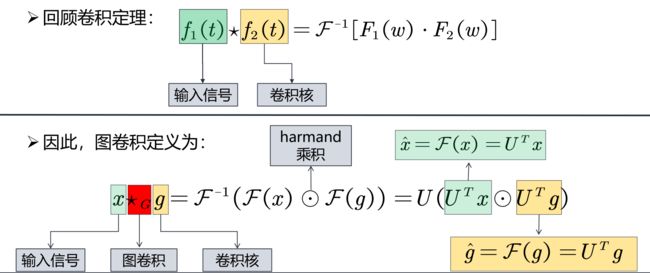
图上的卷积定义:先对输入信号 x 和卷积核 g 做傅里叶正变换,然后在谱域上做 harmand 乘积,也就是 F ( x ) ⊙ F ( g ) 。最后通过傅里叶反变换 F-1 将结果返回到空域。
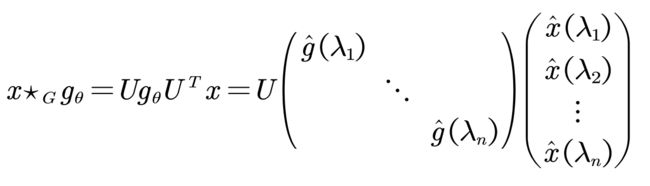
如果用矩阵乘法的形式来表达这个公式,去掉harmand乘积。同时,通常并不关心空间域上的滤波器信号g是什么样子的,只关心其在频域的情况。令

则公式等价的转换成下式:

所有的谱图卷积都遵循这些定义,唯一的不同就是 滤波器 filter 的选取
3、三个经典图谱卷积模型
简介
- 三个图谱卷积模型(SCNN、ChebNet、GCN)均立足于谱图理论且一脉相承。
- ChebNet可看做SCNN的改进,GCN可看做ChebNet的改进。
- 三个模型均可认为是下式的一个特例。
在卷积前后:
其中,某一层的特征图可以表示为一个 nxc 的矩阵。n代表图中有n个结点,C是通道个数。图中的信号可以分解为各个结点上的信号。X代表整个图上的信号,是nxc 的矩阵,Xi代表某个结点的信号,是一个 1xc 的向量。
在不同层中,特征图结构是不发生变化的,只有图上的信号会发生变化。
3.1 SCNN
论文:Spectral networks and locally connected networks on graphs
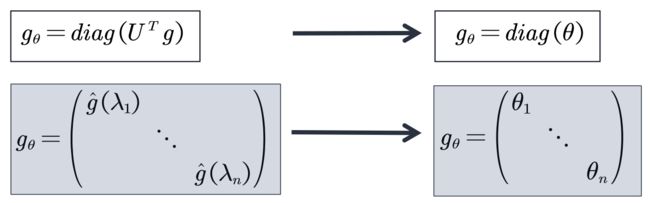
第一代GCN,文中给出了两个模型,分别是基于空间域的和基于谱域的。基于谱域的模型的核心是用对角矩阵来代替谱域的卷积核
核心思想:用可学习的对角矩阵来代替谱域的卷积核,从而实现图卷积操作。即:
公式定义如下:

- 其中, Ck表示第k层的channel(通道)个数, xk,i ∈ Rn表示第k层的第i个channel的 feature map(特征图)
- Fk,i,j 属于 Rnxn 代表参数化的谱域的卷积核矩阵。 它是一个对角矩阵,包含了n个可学习的参数。h(·) 是激活函数。
SCNN的缺点
- 计算拉普拉斯矩阵的特征值分解非常耗时。计算复杂度为O(n3) ,n为节点个数。当处理大规模图数据时(比如社交网络数据,通常有上百万个节点)会面临很大的挑战。
- 模型的参数复杂度较大。计算复杂度为 ,当节点数较多时容易过拟合。
- 无法保证局部链接,因为将频域转为空域后是全局连接。
3.2 ChebNet
论文:Convolutional neural networks on graphs with fast localized spectral filtering
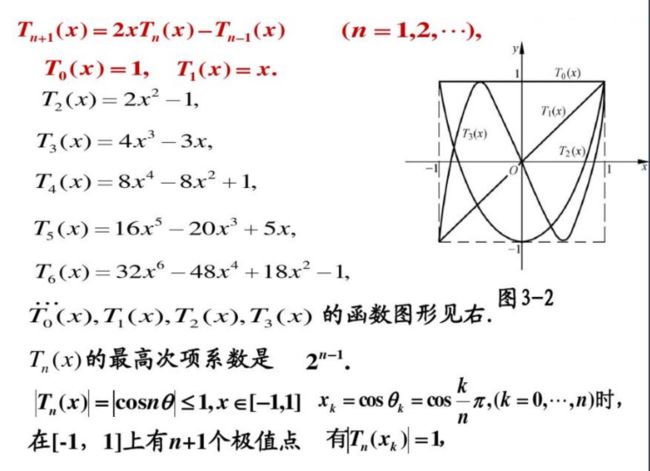
切比雪夫多项式:
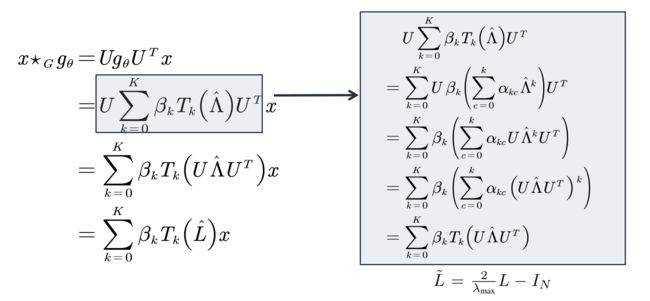
在矩阵状态下, 切比雪夫多项式可以表示为:

核心思想:采用切比雪夫多项式近似谱域的filter。
因为切比雪夫多项式在逼近理论中,可以用于多项式插值,也就是说可以利用切比雪夫多项式来逼近函数。
在拟合时,将x的k次方换成了切比雪夫多项式的k阶项,用切比雪夫多项式来进行逼近。如下图:

为什么要替换?当替换后,SCNN中可以省略对于拉普拉斯矩阵的特征值分解这一最耗时的操作,直接使用拉普拉斯矩阵即可
ChebNet特点: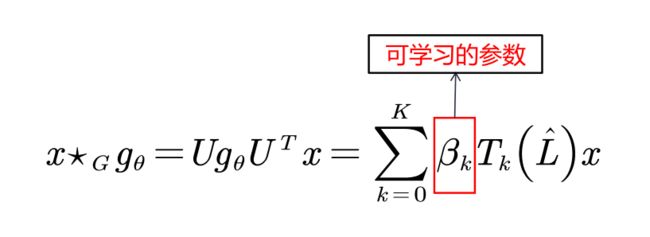
- 卷积核只有K+1个可学习的参数,一般 K远小于n,参数的复杂度被大大降低
- 采用Chebyshev多项式代替谱域的卷积核后,经过推导,ChebNet不需要对拉普拉斯矩阵做特征分解了。省略了最耗时的步骤。
- 卷积核具有严格的空间局部性。同时,K就是卷积核的“感受野半径”。即将中心顶点K阶近邻节点作为邻域节点。
3.3 GCN
论文:Semi-supervised classification with graph convolutional networks
GCN可视为对ChebNet的进一步简化:仅考虑1阶切比雪夫多项式,且每个卷积核仅只有一个参数,所以只有两个参数。
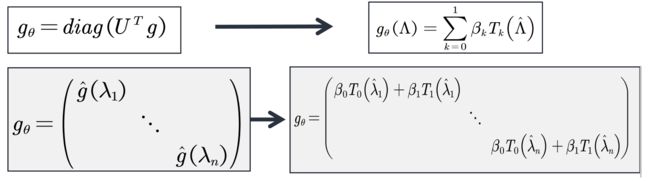
理解:
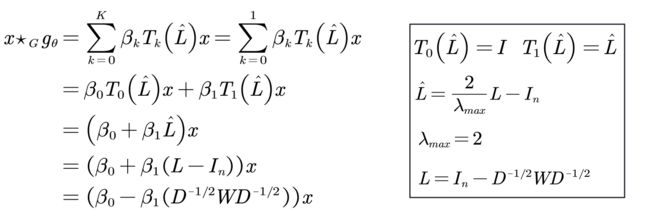
进一步简化,使得每个卷积核只有一个可学习的参数。

因为  有范围[0,2]的特征值,如果在深度神经网络模型中使用该算子,则反复应用该算子会导致数值不稳定(发散)和梯度爆炸/消失,为了解决该问题, 引入了一个 renormalization trick.
有范围[0,2]的特征值,如果在深度神经网络模型中使用该算子,则反复应用该算子会导致数值不稳定(发散)和梯度爆炸/消失,为了解决该问题, 引入了一个 renormalization trick.
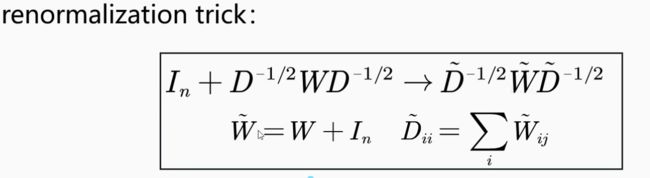
从而得到GCN的最终公式

GCN的特点:
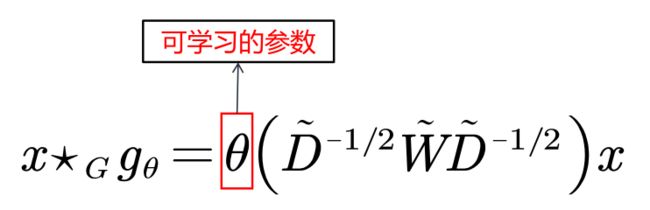
- 在忽略input channel 和 output channel的情况下,卷积核只有1个可学习的参数,极大的减少了参数量。( 按照作者的说法: “We intuitively expect that such a model can alleviate the problem of overfitting on local neighborhood structures for graphs with very wide node degree distributions, such as socialnetworks, citation networks, knowledge graphs and many other real-world graph datasets.”)
- 虽然卷积核大小减少了(GCN仅仅关注于一阶邻域,类似于3X3的经典卷积),但是作者认为通过多层堆叠GCN,仍然可以起到扩大感受野的作用。
- 与此同时,这样极端的参数削减也受到一些人的质疑。他们认为每个卷积核如果只设置一个可学习参数,会降低模型的能力。(可以参考博文How powerful are Graph Convolutions? )
- 如果将传统图像的每一个像素视为graph的一个节点,节点之间为八邻域链接,图像也可以看做一张特殊的图。那么在每个3*3的卷积核里,仅仅存在1个可学习的参数。
- 从目前应用在image的深度学习经验看来,这样的卷积模型复杂度虽然低,但是模型的能力也遭到了削弱,可能难以处理复杂的任务。