【深度学习】基于套索的图像标注工具开发
目录
- 参考文献
- 一、先上才艺
- 二、实现思路
- 三、核心代码
- 后续可优化
参考文献
Reference:
[1] Mortensen E N, Barrett W A. Intelligent scissors for image composition[C]//Proceedings of the 22nd annual conference on Computer graphics and interactive techniques. ACM, 1995: 191-198.
[2] Mortensen E N, Barrett W A. Interactive segmentation with intelligent scissors[J]. Graphical models and image processing, 1998, 60(5): 349-384.
[3] CS 4670/5670, Project 1: Image Scissors
[4] Robert Sedgewick Kevin Wayne算法(中文第四版)
开源代码参考学习:
Opencv3实现智能剪刀算法 - IntelligentScissor
https://blog.csdn.net/DdogYuan/article/details/80554873
考虑之前的工作内容,需要将图片进行预处理,对龋齿进行标注,大多数场景下需要进行再调整,因此开源的标注工具Labelme不能满足工作需要。
使用C# winform进行桌面开发。
一、先上才艺
- 1、启动程序会自动在D盘根目录创建一个ToothDentalRes文件夹,里边包含两个原始文件夹

Oragin文件夹中放入要标注的图片,Edited是生成的标注信息,目前只支持json格式。 - 2、启动后,输入默认账号和密码,1&1,进入标注主界面


- 3、点击读取图片,会默认打开D:\ToothDentalRes\Origin文件夹,选中一个图片
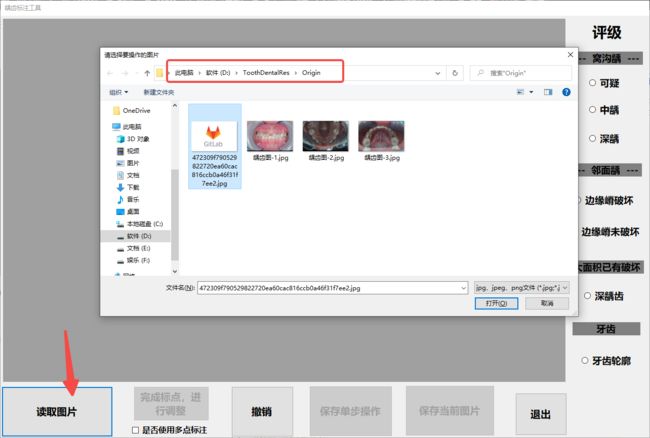
- 4、选中右侧龋齿级别(因为此次是为了牙齿标注做的,可以修改为其他),然后打开多点标注

- 5、保存当前图片,在生成json的文件如下:
-
{
"flag": {},
"shapes": [
{
"label": "tooth",
"line_color": null,
"fill_color": null,
"points": [
[
948,
797
],
[
910,
798
],
[
905,
833
],
[
906,
877
],
[
910,
907
],
[
923,
954
],
[
929,
996
],
[
947,
1037
],
[
971,
1083
],
[
1016,
1105
],
[
1057,
1078
],
[
1094,
1035
],
[
1132,
977
],
[
1131,
951
],
[
1089,
909
],
[
1068,
875
],
[
1031,
842
],
[
991,
814
]
]
},
{
"label": "D",
"line_color": null,
"fill_color": null,
"points": [
[
1156,
842
],
[
1143,
886
],
[
1155,
934
],
[
1177,
932
],
[
1204,
917
],
[
1217,
882
],
[
1207,
852
],
[
1182,
838
]
]
},
{
"label": "B",
"line_color": null,
"fill_color": null,
"points": [
[
968,
1004
],
[
999,
1002
],
[
1035,
1015
],
[
1051,
918
],
[
1045,
893
],
[
966,
839
],
[
947,
834
],
[
922,
853
],
[
938,
910
],
[
944,
961
],
[
927,
992
]
]
}
],
"lineColor": [
0,
255,
0,
128
],
"fillColor": [
255,
0,
0,
128
],
"imagePath": "D:\\ToothDentalRes\\Edited\\龋齿图-1.jpg",
"imageData": ""
}
二、实现思路
核心还是需要套索算法来进行实现,两种标注方式,一种是完全自由的,类似于画图板,只需要将所有的坐标保存即可。另一种是可调整的节点,我这里的处理是将节点作为一个方形图形加入,根据左上角坐标为点,进行所有节点连线,在移动的过程中进行重绘。
基础框架:Microsoft .NET Framework 4.6
三、核心代码
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
namespace QsrTool.ScissorTool
{
public class Vertex
{
public Tuple<int, int> Parent;
public float Distance;
public int ImageVerticesToParent; // Number of ImageVertices between current vertex and its parent
public int i, j; // (i,j)->position of the vertex in the array ImageVertices
public int index; // index of the vertex in the heap
public Vertex(int x, int y)
{
j = y;
i = x;
Parent = null;
Distance = float.MaxValue;
ImageVerticesToParent = 0;
}
}
public class priority_queue
{
int length;
public void Swap<T>(ref T lhs, ref T rhs)
{
T temp;
temp = lhs;
lhs = rhs;
rhs = temp;
}
public void Swap<T>(T lhs, T rhs)
{
T temp;
temp = lhs;
lhs = rhs;
rhs = temp;
}
public int heap_size;
public Vertex[] arr;
public int parent(int i)
{
return i / 2;
}
public int left(int i)
{
return 2 * i;
}
public int right(int i)
{
return 2 * i + 1;
}
public void min_heapify(int i)
{
if (heap_size == 0)
return;
int l = left(i), r = right(i), smallest = i;
if (l <= heap_size && arr[l].Distance < arr[smallest].Distance)
smallest = l;
if (r <= heap_size && arr[r].Distance < arr[smallest].Distance)
smallest = r;
if (smallest != i)
{
Swap<int>(ref arr[smallest].index, ref arr[i].index);
Swap<Vertex>(ref arr[smallest], ref arr[i]);
min_heapify(smallest);
}
}
public priority_queue(ref Vertex[,] ImageVertices, int Height, int Width)
{
length = Height * Width;
heap_size = length;
arr = new Vertex[length + 1];
int index = 1;
for (int i = 0; i < Width; i++)
{
for (int j = 0; j < Height; j++)
{
arr[index] = ImageVertices[i, j];
//ImageVertices[i, j].Distance = 757;
ImageVertices[i, j].index = index;
index++;
}
}
for (int i = length / 2; i > 0; i--)
{
min_heapify(i);
}
}
public Vertex extract_min()
{
Vertex min = arr[1];
arr[1] = arr[heap_size];
arr[1].index = 1;
heap_size--;
min_heapify(1);
return min;
}
}
public class Graph
{
//first dimension = right neighbour, Second = bottom, third = left, fourth = upper
//public double[,,] Weight;
public int Height, Width;
RGBPixel[,] ImageMatrix;
//First dimension represents the width and the second represents the height
public Vertex[,] ImageVertices;
public bool[,] isValid;
public priority_queue Q;
public Graph(RGBPixel[,] ImageMatrix)
{
this.ImageMatrix = ImageMatrix;
//Get Width and Height
Height = ImageOperations.GetHeight(ImageMatrix);
Width = ImageOperations.GetWidth(ImageMatrix);
GC.Collect();
//Allocate 2D array of ImageVertices
ImageVertices = new Vertex[Width, Height];
isValid = new bool[Width, Height];
for (int i = 0; i < Width; i++)
{
for (int j = 0; j < Height; j++)
isValid[i, j] = true;
}
}
private float GetWeight(int x1, int y1, int x2, int y2)
{
if (x1 < x2) // Second cell to the right of the first cell
{
float temp = (float)ImageOperations.CalculatePixelEnergies(x1, y1, ImageMatrix).X;
if (temp != 0) return (float)1.0 / temp;
return 1E30f; // To avoid dividing by zero
}
else if (x2 < x1) // First cell to the right of the second cell
{
float temp = (float)ImageOperations.CalculatePixelEnergies(x2, y2, ImageMatrix).X;
if (temp != 0) return (float)1.0 / temp;
return 1E30f;
}
else if (y1 < y2) // Second cell below the first cell
{
float temp = (float)ImageOperations.CalculatePixelEnergies(x1, y1, ImageMatrix).Y;
if (temp != 0) return (float)1.0 / temp;
return 1E30f;
}
else // First cell below the second cell
{
float temp = (float)ImageOperations.CalculatePixelEnergies(x2, y2, ImageMatrix).Y;
if (temp != 0) return (float)1.0 / temp;
return 1E30f;
}
}
void Relax_All(ref Vertex u)
{
//Relaxes the edges between u and all its neighbours
if (u.j < Height - 1)
Relax(ref u, ref ImageVertices[u.i, u.j + 1], GetWeight(u.i, u.j, u.i, u.j + 1));
if (u.i < Width - 1)
Relax(ref u, ref ImageVertices[u.i + 1, u.j], GetWeight(u.i, u.j, u.i + 1, u.j));
if (u.j > 0)
Relax(ref u, ref ImageVertices[u.i, u.j - 1], GetWeight(u.i, u.j, u.i, u.j - 1));
if (u.i > 0)
Relax(ref u, ref ImageVertices[u.i - 1, u.j], GetWeight(u.i, u.j, u.i - 1, u.j));
}
void Relax(ref Vertex u, ref Vertex v, float w)
{
//Relaxes the edges between u and v
if (u == null || v == null || (!isValid[v.i, v.j]))
return;
if (v.Distance > u.Distance + w)
{
v.Distance = u.Distance + w;
Tuple<int, int> temp = new Tuple<int, int>(u.i, u.j);
v.Parent = temp;
v.ImageVerticesToParent = u.ImageVerticesToParent + 1;
while (Q.parent(v.index) > 0 && Q.arr[v.index].Distance < Q.arr[Q.parent(v.index)].Distance)
{
Q.Swap<Vertex>(ref Q.arr[v.index], ref Q.arr[Q.parent(v.index)]);
Q.Swap<int>(ref Q.arr[v.index].index, ref Q.arr[Q.parent(v.index)].index);
}
}
}
public void Dijkstra(int x, int y)
{
#region Pruning
//Pruning distance
int diff = 250;
Vertex[,] WindowVertices;
int Width2 = 0, Height2 = 0, x1, x2, y1, y2;
x1 = Math.Max(x - diff, 0);
x2 = Math.Min(Width, x + diff);
y1 = Math.Max(y - diff, 0);
y2 = Math.Min(Height, y + diff);
Width2 = x2 - x1;
Height2 = y2 - y1;
WindowVertices = new Vertex[Width2, Height2];
//Destroys any previous calculations and calculate the shortest path from the given point
for (int i = x1; i < x2; i++)
{
for (int j = y1; j < y2; j++)
{
ImageVertices[i, j] = new Vertex(i, j);
}
}
//Set the source distance to zero
ImageVertices[x, y].Distance = 0;
int w1 = 0, h1 = 0;
for (int i = x1; i < x2; i++)
{
h1 = 0;
for (int j = y1; j < y2; j++)
{
WindowVertices[w1, h1] = ImageVertices[i, j];
h1++;
}
w1++;
}
//Priority queue using heap containing all ImageVertices
Q = new priority_queue(ref WindowVertices, Height2, Width2);
//End of Pruning
#endregion
while (Q.heap_size > 0)
{
//Extract the vertex with minimum distance and relax its edges
Vertex u = Q.extract_min();
int i = u.i, j = u.j;
Relax_All(ref u);
}
Q = null;
GC.Collect(); // Manually calling the garbage collector
}
}
}
using System;
using System.Collections.Generic;
using System.Text;
using System.Drawing;
using System.Windows.Forms;
using System.Drawing.Imaging;
namespace QsrTool.ScissorTool
{
/// 2D array of colors
public static RGBPixel[,] OpenImage(string ImagePath)
{
Bitmap original_bm = new Bitmap(ImagePath);
int Height = original_bm.Height;
int Width = original_bm.Width;
RGBPixel[,] Buffer = new RGBPixel[Height, Width];
unsafe
{
BitmapData bmd = original_bm.LockBits(new Rectangle(0, 0, Width, Height), ImageLockMode.ReadWrite, original_bm.PixelFormat);
int x, y;
int nWidth = 0;
bool Format32 = false;
bool Format24 = false;
bool Format8 = false;
if (original_bm.PixelFormat == PixelFormat.Format24bppRgb)
{
Format24 = true;
nWidth = Width * 3;
}
else if (original_bm.PixelFormat == PixelFormat.Format32bppArgb || original_bm.PixelFormat == PixelFormat.Format32bppRgb || original_bm.PixelFormat == PixelFormat.Format32bppPArgb)
{
Format32 = true;
nWidth = Width * 4;
}
else if (original_bm.PixelFormat == PixelFormat.Format8bppIndexed)
{
Format8 = true;
nWidth = Width;
}
int nOffset = bmd.Stride - nWidth;
byte* p = (byte*)bmd.Scan0;
for (y = 0; y < Height; y++)
{
for (x = 0; x < Width; x++)
{
if (Format8)
{
Buffer[y, x].red = Buffer[y, x].green = Buffer[y, x].blue = p[0];
p++;
}
else
{
Buffer[y, x].red = p[0];
Buffer[y, x].green = p[1];
Buffer[y, x].blue = p[2];
if (Format24) p += 3;
else if (Format32) p += 4;
}
}
p += nOffset;
}
original_bm.UnlockBits(bmd);
}
return Buffer;
}
/// Image Height
public static int GetHeight(RGBPixel[,] ImageMatrix)
{
return ImageMatrix.GetLength(0);
}
/// Image Width
public static int GetWidth(RGBPixel[,] ImageMatrix)
{
return ImageMatrix.GetLength(1);
}
/// edge energy with the right pixel (X) and with the bottom pixel (Y)
public static Vector2D CalculatePixelEnergies(int x, int y, RGBPixel[,] ImageMatrix)
{
if (ImageMatrix == null) throw new Exception("image is not set!");
Vector2D gradient = CalculateGradientAtPixel(x, y, ImageMatrix);
double gradientMagnitude = Math.Sqrt(gradient.X * gradient.X + gradient.Y * gradient.Y);
double edgeAngle = Math.Atan2(gradient.Y, gradient.X);
double rotatedEdgeAngle = edgeAngle + Math.PI / 2.0;
Vector2D energy = new Vector2D();
energy.X = Math.Abs(gradientMagnitude * Math.Cos(rotatedEdgeAngle));
energy.Y = Math.Abs(gradientMagnitude * Math.Sin(rotatedEdgeAngle));
return energy;
}
/// smoothed color image
public static RGBPixel[,] GaussianFilter1D(RGBPixel[,] ImageMatrix, int filterSize, double sigma)
{
int Height = GetHeight(ImageMatrix);
int Width = GetWidth(ImageMatrix);
RGBPixelD[,] VerFiltered = new RGBPixelD[Height, Width];
RGBPixel[,] Filtered = new RGBPixel[Height, Width];
// Create Filter in Spatial Domain:
//=================================
//make the filter ODD size
if (filterSize % 2 == 0) filterSize++;
double[] Filter = new double[filterSize];
//Compute Filter in Spatial Domain :
//==================================
double Sum1 = 0;
int HalfSize = filterSize / 2;
for (int y = -HalfSize; y <= HalfSize; y++)
{
//Filter[y+HalfSize] = (1.0 / (Math.Sqrt(2 * 22.0/7.0) * Segma)) * Math.Exp(-(double)(y*y) / (double)(2 * Segma * Segma)) ;
Filter[y + HalfSize] = Math.Exp(-(double)(y * y) / (double)(2 * sigma * sigma));
Sum1 += Filter[y + HalfSize];
}
for (int y = -HalfSize; y <= HalfSize; y++)
{
Filter[y + HalfSize] /= Sum1;
}
//Filter Original Image Vertically:
//=================================
int ii, jj;
RGBPixelD Sum;
RGBPixel Item1;
RGBPixelD Item2;
for (int j = 0; j < Width; j++)
for (int i = 0; i < Height; i++)
{
Sum.red = 0;
Sum.green = 0;
Sum.blue = 0;
for (int y = -HalfSize; y <= HalfSize; y++)
{
ii = i + y;
if (ii >= 0 && ii < Height)
{
Item1 = ImageMatrix[ii, j];
Sum.red += Filter[y + HalfSize] * Item1.red;
Sum.green += Filter[y + HalfSize] * Item1.green;
Sum.blue += Filter[y + HalfSize] * Item1.blue;
}
}
VerFiltered[i, j] = Sum;
}
//Filter Resulting Image Horizontally:
//===================================
for (int i = 0; i < Height; i++)
for (int j = 0; j < Width; j++)
{
Sum.red = 0;
Sum.green = 0;
Sum.blue = 0;
for (int x = -HalfSize; x <= HalfSize; x++)
{
jj = j + x;
if (jj >= 0 && jj < Width)
{
Item2 = VerFiltered[i, jj];
Sum.red += Filter[x + HalfSize] * Item2.red;
Sum.green += Filter[x + HalfSize] * Item2.green;
Sum.blue += Filter[x + HalfSize] * Item2.blue;
}
}
Filtered[i, j].red = (byte)Sum.red;
Filtered[i, j].green = (byte)Sum.green;
Filtered[i, j].blue = (byte)Sum.blue;
}
return Filtered;
}
#region Private Functions
/// 后续可优化
- 当前保存节点的形式是队列,有先后顺序,因此会出现节点交叉的情况。后期可以弱化节点的时间顺序,根据横纵坐标进行判断,重新排序
- 多种方式进行绘制并存
- 算法优化,等等大佬们发论文吧
release程序下载:
链接:https://pan.baidu.com/s/1vd-MRYDj5YjKR_rVA2QtSg
提取码:qiao