opencv自定义滤波器(filter2D函数的使用)
自定义线性滤波
卷积概念
卷积是图像处理中一个操作,是kernel在图像的每个像素上的操作。
Kernel本质上一个固定大小的矩阵数组,其中心点称为锚点(anchor point)
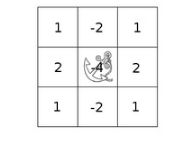
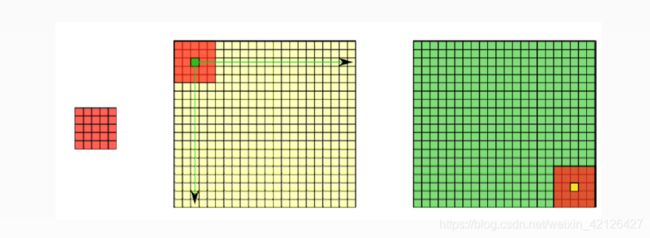
卷积如何工作
把kernel放到像素数组之上,求锚点周围覆盖的像素乘积之和(包括锚点),用来替换锚点覆盖下像素点值称为卷积处理。数学表达如下:




代码部分:
// opencv0016.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include
#include
using namespace std;
using namespace cv;
int main()
{
Mat src, dst;
int ksize = 0;
src = imread("D:/images/pkq.jpg");
if (!src.data) {
printf("could not load image...\n");
return -1;
}
char INPUT_WIN[] = "input image";
char OUTPUT_WIN[] = "Custom Blur Filter Result";
namedWindow(INPUT_WIN, CV_WINDOW_AUTOSIZE);
namedWindow(OUTPUT_WIN, CV_WINDOW_AUTOSIZE);
imshow(INPUT_WIN, src);
//Sobel X方向
Mat dst1;
Mat kernel_x = (Mat_(3, 3) << -1, 0, 1, -2, 0, 2, -1, 0, 1);
filter2D(src, dst1, -1, kernel_x, Point(-1, -1), 0.0);
namedWindow("kernel_x", CV_WINDOW_AUTOSIZE);
imshow("kernel_x", dst1);
//Sobel Y方向
Mat yimg;
Mat kernel_y = (Mat_(3, 3) << -1, -2, -1, 0, 0, 0, 1, 2, 1);
filter2D(src, yimg, -1, kernel_y, Point(-1, -1), 0.0);
namedWindow("kernel_y", CV_WINDOW_AUTOSIZE);
imshow("kernel_y", yimg);
// 拉普拉斯算子
Mat LapImage;
Mat Laplace = (Mat_(3, 3) << 0, -1, 0, -1, 4, -1, 0, -1, 0);
filter2D(src, LapImage, -1, Laplace, Point(-1, -1), 0.0);
namedWindow("LapImage", CV_WINDOW_AUTOSIZE);
imshow("LapImage", LapImage);
int c = 0;
int index = 0;
while (true) {
c = waitKey(500);
if ((char)c == 27) {// ESC
break;
}
ksize = 5 + (index % 8) * 2;
Mat kernel = Mat::ones(Size(ksize, ksize), CV_32F) / (float)(ksize * ksize);
filter2D(src, dst, -1, kernel, Point(-1, -1));
index++;
imshow(OUTPUT_WIN, dst);
}
waitKey(0);
return 0;
}

喜欢的可以关注我博客,一起进步吧。