【PCL】——点云凸包检测 ConvexHull 和 CropHull 滤波
参考:
- https://blog.csdn.net/rocachilles/article/details/95199316
- https://blog.csdn.net/m0_37914211/article/details/102855498
- https://blog.csdn.net/zfjBIT/article/details/92795689
1. Convex Hull 凸包顶点求解:
- 点云凸包检测还是比较常用的,PCL自带的凸包检测 ConvexHull ,这个函数比较简单,设置凸包维度 setDimension即可:
// 生成凸包与计算体积:
// 头文件:
#include (surface_hull, 0, 0, 255, "polyline");
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
}
采用斯坦福小兔点云,效果如图:
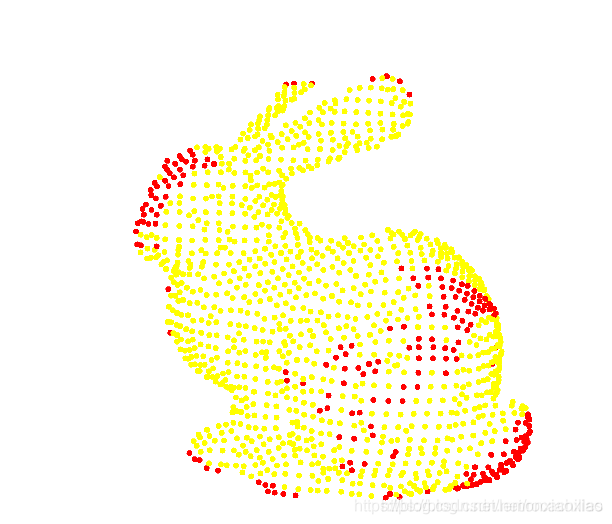
如果进一步将某个确定的凸包中的点云从场景分割出来,可以采用 CropHull 进行滤波。
2. CropHull 滤波器:
- CropHull滤波器得到2D封闭多边形内部或者外部的点云。
pcl::CropHull< PointT >
void setHullIndices (const std::vector< Vertices > &polygons)
// 输入封闭多边形的顶点;
void setHullCloud (PointCloudPtr points)
// 输入封闭多边形的形状;
void setDim (int dim)
// 设置维度:该维度需要与凸包维度一致;
void setCropOutside (bool crop_outside)
// 设置保留封闭多边形的内点or外点:默认保留内点;
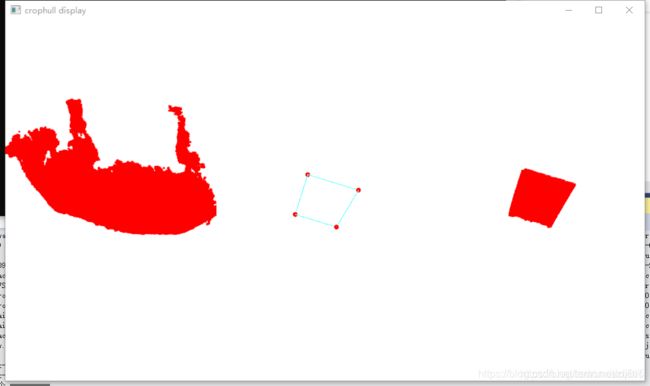
示例:
#include 显示如图: