强化学习--PPO(近端策略优化)
On-policy 和 Off-policy
1. 策略梯度 是一个 on-policy 的算法。
因为 是 一个 actor 按照 policy 去和 env 互动,得到一系列轨迹,根据 它 互动 的信息(s,a,r)按照 策略梯度 的 公式 更新 策略π 的参数θ 。【学习和交互是同一个agent】

上一章 计算 的 策略梯度。 policy πθ 采样出来轨迹τ的概率 pθ(τ), 在参数更新后,就发生了改变pθ(τ)这个概率就不对了,所以采样的数据 也不能再继续使用了,所以要重新采集。这就解释了上一章 说的 为什么 采样一次更新一次。
2. 对于上述 问题 ,会进行很多次采样 的 改进 -》off-policy。
用一个 固定的 policy ,actor θ′ 去跟环境做互动,收集数据, 去训练更新 另一个 policy actor θ
具体做法:
【重要性采样】-- 但是 pθ(at∣st) 跟 pθ′(at∣st) 这两个分布差太多的话,重要性采样的结果就会不好。因为 方差 var 差的大
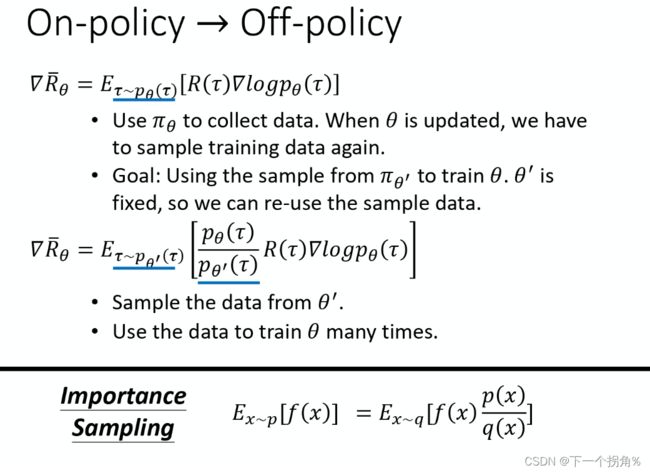
重要性采样 推导公式:
θ′ 和 θ 分布不一样, θ′ 可以是任意分布,所以有个 修正 “重要性权重” pθ(τ)/pθ'(τ) [ 重要性权重就是某一个轨迹 τ 用 θ 算出来的概率 除以 这个轨迹 τ 用 θ′ 算出来的概率 ] 。
3.对于 上一个 图片中 R( τ )是一个回合的奖励,上一章的 tip 中 改进了 这个奖励 权重 ,为了削弱 采样 方差大的问题 引入 baseline ,对于不同动作 采取不同权重而不是整个回合的奖励权重。得到下图:

(1)第一个红线 出应该是 θ′ ,因为是 用的 θ′ 和环境交互,采集的reward 应该是θ′ 产生的
(2)第二个红线 假设了 模型 θ 的时候,看到 s_t 的概率,跟模型是 θ′ 的时候,你看到 s_t 的概率是差不多的,即pθ(st)=pθ′(st)。直观原因解释是算不出来,所以无视??这个有一些问题
(3)得到新的 目标函数
总结:
1. θ′ 去跟环境做互动,采样出 s_t、a_t
2.计算 s_t 跟 a_t 的 advantage 奖励
3.乘上 pθ(at∣st) \ pθ′(at∣st) 。知道 θ 和 θ′ 的参数 ,就是两个网络 ,输入 s_t ,输出 每一个 a_t 的概率是多少。
4.求梯度 更新 θ 
PPO
【由于在 PPO 中θ′ 是 θold,即 behavior policy 也是 θ,所以 PPO 是 on-policy 的算法。那不就是一个θ 了吗??】
出现的原因:
针对上面 重要性采样 的 问题 -- pθ(at∣st) 跟 pθ′(at∣st) 不能差太多 。怎么 避免差的多-》ppo。
解决方案:
在 训练 的时候明天添加了 一个 约束,约束是 θ 跟θ′ 输出的动作的 KL 散度(KL divergence),这一项的意思就是要衡量说θ 跟 θ′ 有多像。所以 PPO的优化目标函数添加一项,变为
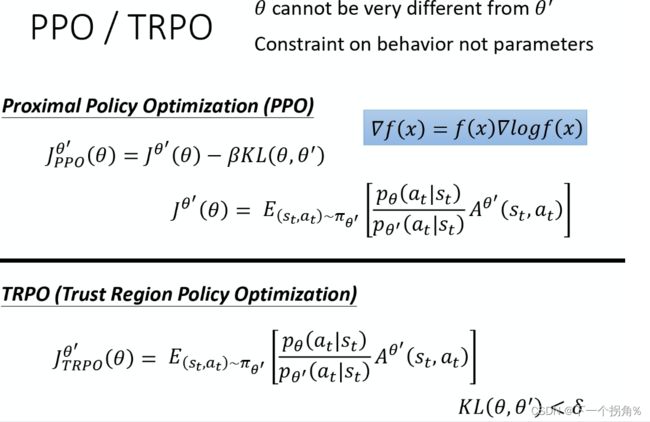
下面 的 TRPO 是 PPO 的前身,此处KL散度 没有在优化目标函数中直接计算,而是一个额外约束,基于梯度优化的时候,有约束的很难处理
(1)KL散度:不是计算的 θ 和 θ′ 参数上的距离,而是 动作 上的距离。输入:相同状态,输出:动作空间的概率分布,计算两个 概率分布 之间的KL散度。把 不同的状态 输出 的这 两个分布 的 KL 散度 平均 起来就是所指的两个 actor 间的 KL 散度。
变种1 PPO1-(PPO-Penalty)
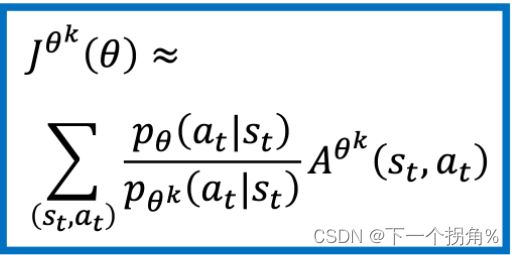
(1)先初始化一个 policy 的参数 \theta^0 θ0。然后在每一个迭代里面,你要用参数 \theta^k θk,\theta^k θk 就是你在前一个训练的迭代得到的 actor 的参数,你用 \theta^k θk 去跟环境做互动,采样到一大堆状态-动作的对。
(2) KL散度前面系数 β 可以动态调整:

先设一个你可以接受的 KL 散度的最大值。假设优化完这个式子以后,你发现 KL 散度的项太大,那就代表说后面这个惩罚的项没有发挥作用,那就把 β 调大,让约束增强。当优化完,小于最小值,说明θ 跟 θk 很像,要减弱 约束。
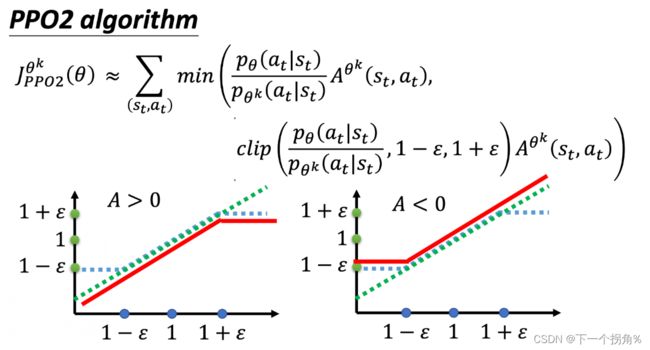
变种2 PPO2--PPO Clip
提出理由:算 KL 散度很复杂,这个变种 的优化目标函数里没有KL散度。但是仍然要解决 重要性采样的问题 目的:pθ(at∣st) 跟pθk(at∣st),也就是拿来做示范的模型跟实际上学习的模型,在优化以后不要差距太大。

- 第二项前面有个 clip 函数,clip 函数的意思是说,
- 在括号里面有三项,如果第一项小于第二项的话,那就输出 1-\varepsilon 1−ε 。
- 第一项如果大于第三项的话,那就输出 1+\varepsilon 1+ε。
- \varepsilon ε 是一个超参数,可以设成 0.1 或 设 0.2 。

上图的横轴是 pθk(at∣st) / pθk(at∣st),纵轴是 clip 函数的输出。
- 如果pθk(at∣st) / pθk(at∣st) 大于 1+ε,输出就是 1+ε。
- 如果小于 1−ε, 它输出就是 1−ε。
- 如果介于 1+ε 跟 1−ε 之间, 就是输入等于输出。