【数据结构】图的详细分析(全)
目录
- 前言
- 1. 定义
- 2. 存储结构
-
- 2.1 邻接矩阵
- 2.2 邻接表
- 3. 图的遍历
-
- 3.1 深度优先搜索
- 3.2 广度优先搜索
- 4. 图的应用
-
- 4.1 最小生成树
-
- 4.1.1 普里姆算法
- 4.1.2 克鲁斯卡尔算法
- 4.2 最短路径
-
- 4.2.1 迪杰斯特拉算法
- 4.2.2 弗洛伊德算法
前言
以下笔记是天勤版本的考研数据结构数据书籍
通过参考其书籍做下的笔记
图是一种比线性表和树更为复杂的数据结构。在线性表中,数据元素之间仅有线性关系,每个数据元素只有一个直接前驱和一个直接后继;在 树形结构中,数据元素之间有着明显的层次关系,并且每一层中的数据元素可能和下一层中的多个元素(即其孩子结点)相关,但只能和上一层中一个元素(即其双亲结点)相关; 而在图结构中,结点之间的关系可以是任意的,图中任意两个数据元素之间都可能相关。
1. 定义
图(Graph) G由两个集合V和E组成,记为G=(V,E) , 其中V是顶点的有穷非空集合,E是V中顶点偶对的有穷集合,这些顶点偶对称为边。V(G)和E(G)通常分别表示图G的顶点集合和边集合,E(G)可以为空集。若E(G)为空,则图G只有顶点而没有边。
分有向图和无向图
有向图:顶点对
在无向图:,顶点对 ( x, y)是无序的,它称为顶点 x到顶点 y关联的一条边



- 子图:类似集合的包含关系
- 无向完全图和有向完全图:无向图,
若具有 n(n- 1)/2 条边,则称为无向完全图。对于有向图,若具有n(n- 1)条弧,则称为有向完全图 - 权和网:每条边可以标上具有某种含义的数值,该数值称为该边上的权。
这些权可以表示从一个顶点到另一个顶点的距离或耗费。这种带权的图通常称为网 - 度、入度和出度:
顶点的度是指和其相关联的边的数目
对于有向图,顶点v的度分为入度和出度。入度是以顶点v为头的弧的数目, 出度是以顶点 v 为尾的弧的数目 - 回路或环:第一个顶点和最后一个顶点相同的路径称为回路或环
- 简单路径、 简单回路或简单环:
序列中顶点不重复出现的路径称为简单路径。
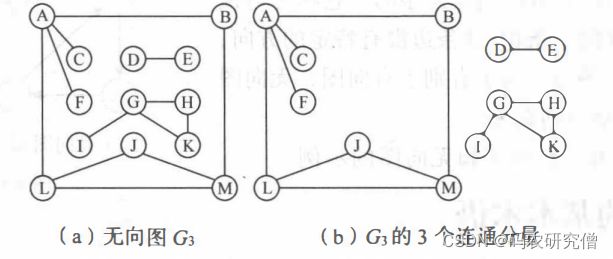
除了第一个顶点和最后一个顶点之外,其余顶点不重复出现的回路,称为简单回路或简单环 - 连通、连通图和连通分量:
无向图种,顶点和顶点相通,称为之连通
(连通图和连通分量具体如下)
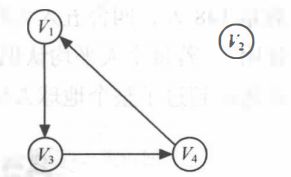
- 强连通图和强连通分量:
在有向图 G 中,顶点到顶点的路径都存在路径,则称是强连通图。
有向图中的极大强连通子图称作有向图的强连通分量
2. 存储结构
图没有顺序存储结构,但可以借助二维数组来表示元素之间的关系,即邻接矩阵表示法。另一方面,图的任意两个顶点间都可能存在关系,因此,用链式存储表示图是很自然的事,图的链式存储有多种,有邻接表、十字链表和邻接多重表,应根据实际需要的不同选择不同的存储结构
2.1 邻接矩阵
邻接矩阵(Adjacency Matrix)是表示顶点之间相邻关系的矩阵
无向图的表示:

有向图的表示:


其结构表示如下所示
//-----图的邻接矩阵存储表示-----
#define Maxint 32767 //表示极大值, 即 ∞
#define MVNum 100 //最大顶点数
typedef char VerTexType;//假设顶点的数据类型为字符型
typedef int ArcType;//假设边的权值类型为整型
typedef struct
{
VerTexType vexs [MVNum] ; //顶点表
ArcType arcs[MVNum) [MVNum); //邻接矩阵
int vexnum,arcnum; //图的当前点数和边数
} AMGraph;
采用邻接矩阵表示法创建无向网
已知一个图的点和边, 使用邻接矩阵表示法来创建此图的方法比较简单, 下面以一个无向网为例来说明创建图的算法
算法步骤:
- 输入总顶点数和总边数。
- 依次输入点的信息存入顶点表中。
- 初始化邻接矩阵, 使每个权值初始化为极大值
- 构造邻接矩阵。依次输入每条边依附的顶点和其权值,确定两个顶点在图中的位置之后,使相应边赋予相应的权值,同时使其对称边赋予相同的权值。
Status CreateUDN(AMGraph &G)
{//采用邻接矩阵表示法,创建无向网G
cin>>G.vexnum>>G.arcnum; //输人总顶点数,总边数
for(i=O;i<G.vexnum;++i) ////依次输入点的信息
cin>>G.vexs[i);
for(i=O;i<G.vexnum;++i) //初始化邻接矩阵,边的权值均置为极大值Maxint
for (j =0; j <G. vexnum; ++j)
G.arcs[i) [j)=Maxint;
for(k=O;k<G.arcnum;++k) //构造邻接矩阵
{
cin>>vl>>v2>>w; //输人一条边依附的顶点及权值
i=LocateVex(G,v1);j=LocateVex(G,v2); //确定v1和v2在G中的位置,即顶点数组的下标
G.arcs[i) [j)=w; //边的权值置为w
G.arcs[j] [i]=G.arcs[i] [j];//置的对称边的权值为w
}
return OK;
}
优缺点如下:
优点
- 便于判断两个顶点之间是否有边, 即
根据A[i][j] = 0或1来判断。 便于计算各个顶点的度。对于无向图,邻接矩阵第i个元素之和就是顶点i的度;对于有向图,第i行元素之和就是顶点 i 的出度,第i 列元素之和就是顶点i的入度。
缺点
- 不便于增加和删除顶点
- 不便于统计边的数目,需要扫描邻接矩阵所有元素才能统计完毕,时间复杂度为O(n2)
- 空间复杂度高。如果是有向图,n个顶点需要n2个单元存储边。如果是无向图,因其邻接矩阵是对称的,所以对规模较大的邻接矩阵可以采用压缩存储的方法,仅存储下三角(或上三角)的元素,这样需要n(n-1)/2个单元即可。但无论以何种方式存储,邻接矩阵表示法的空间复杂度均为O(n2),这对于稀疏图而言尤其浪费空间。
2.2 邻接表
邻接表(Adjacency List) 是图的一种链式存储结构。在邻接表中,对图中每个顶点Vi ; 建立一个单链表,把与 Vi 相邻接的顶点放在这个链表中。邻接表中每个单链表的第一个结点存放有关顶点的信息, 把这一结点看成链表的表头, 其余结点存放有关边的信息, 这样邻接表便由两部分组成:表头结点表和边表
(1) 表头结点表:由所有表头结点以顺序结构的形式存储, 以便可以随机访问任一顶点的边链表。表头结点包括数据域 (data) 和链域 (firstarc) 两部分
(2)边表:由表示图中顶点间关系的 2n个边链表组成。 边链表中边结点包括邻接点域(adjvex)、数据域 (info) 和链域 (nextarc) 三部分
在无向图的邻接表中, 顶点 Vi 的度恰为第i个链表中的结点数;而在有向图中, 第i 个链表中的结点个数只是顶点 Vi 的出度, 为求入度,必须遍历整个邻接表。
//- - - - -图的邻接表存储表示- ----
#define MVNum 100 //最大顶点数
typedef struct ArcNode //边结点
{
int adjvex; //该边所指向的顶点的位置
struct ArcNode * nextarc; //指向下一条边的指针
Otherinfo info; //和边相关的信息
}ArcNode;
typedef struct VNode //顶点信息
{
VerTexType data;
ArcNode *firstarc; //指向第一条依附该顶点的边的指针
) VNode,AdjList[MVNum]; //AdjLst表示邻接表类型
typedef struct //邻接表
AdjList vertices;
int vexnum,arcnum; //图的当前顶点数和边数
}ALGraph;
创建无向图
算法步骤:
- 输入总顶点数和总边数。
- 依次输入点的信息存入顶点表中,使每个表头结点的指针域初始化为NULL。
- 创建邻接表。依次输入每条边依附的两个顶点, 确定这两个顶点的序号i 和 j 之后, 将此边结点分别插入 Vi 和vj 对应的两个边链表的头部。
Status CreateUDG(ALGraph &G)
{//采用邻接表表示法, 创建无向图 G
cin>>G.vexnum>>G.arcnum; //输入总顶点数, 总边数
for(i=O;i<G.vexnum;++i) //输入各点,构造表头结点表
{
cin»G.vertices[i) .data; //输入顶点值
G.vertices[i) .firstarc=NULL;//初始化表头结点的指针域为NULL
}
for(k=O;k<G.arcnum;++k) //输入各边, 构造邻接表
{
cin>>v1>>v2; //输入 一条边依附的两个顶点
i=LocateVex(G,v1); j =LocateVex(G,v2);
//确定vl和 v2在G中位置, 即顶点在G.vertices中的序号
p1=new ArcNode; //生成一个新的边结点*pl
p1->adjvex=j; //邻接点序号为j
p1->nextarc=G. vertices [i] . firstarc; G. vertices [i]. firstarc= p1;
//将新结点*pl插入顶点Vi的边表头部
p2=new ArcNode; //生成另一个对称的新的边结点*p2
p2->adjvex=i; //邻接点序号为i
p2->nextarc=G.vertices[j] .firstarc; G.vertices[j] .firstarc=p2;
//将新结点*p2插入顶点Vj的边表头部
}
return ok;
}
值得注意的是,一个图的邻接矩阵表示是唯一的,但其邻接表表示不唯一,这是因为邻接表表示中,各边表结点的链接次序取决于建立邻接表的算法,以及边的轮入次序
其优点:
- 便于增加和删除顶点。
- 便于统计边的数目, 按顶点表顺序扫描所有边表可得到边的数目,时间复杂度为o(n+e)
- 空间效率高。对于一个具有n个顶点e条边的图 G, 若 G 是无向图,则在其邻接表表示中有 n 个顶点表结点和 2e 个边表结点;若 G 是有向图,则在它的邻接表表示或逆邻接表表示中均有 n 个顶点表结点和e个边表结点。因此,邻接表或逆邻接表表示的空间复杂度为 O(n + e), 适合表示稀疏图。对于稠密图,考虑到邻接表中要附加链域,因此常采取邻接矩阵表示法。
缺点:
- 不便于判断顶点之间是否有边,要判定 Vi 和vj 之间是否有边,就需扫描第i个边表,最坏情况下要耗费 O(n)时间。
- 不便于计算有向图各个顶点的度。对于无向图,在邻接表表示中顶点Vi 的度是第i个边表中的结点个数。 在有向图的邻接表中,第 i 个边表上的结点个数是顶点 Vi的出度,但求 Vi的入度较困难,需遍历各顶点的边表。若有向图采用逆邻接表表示,则与邻接表表示相反,求顶点的入度容易,而求顶点的出度较难。
3. 图的遍历
和树的遍历类似,图的遍历也是从图中某一顶点出发,按照某种方法对图中所有顶点访问且仅访问一次。 图的遍历算法是求解图的连通性问题、 拓扑排序和关键路径等算法的基础
通常有两条遍历图的路径:深度优先搜索和广度优先搜索。 它们对无向图和有向图都适用
3.1 深度优先搜索
深度优先搜索(DepthFirst Search, DFS)遍历类似于树的先序遍历,是树的先序遍历的推广
步骤如下:
- 从图中某个顶点v出发, 访问v。
- 找出刚访问过的顶点的第一个未被访问的邻接点, 访问该顶点。 以该顶点为新顶点,重复此步骤, 直至刚访问过的顶点没有未被访问的邻接点为止。
- 返回前一个访问过的且仍有未被访问的邻接点的顶点,找出该顶点的下一个未被访问的邻接点, 访问该顶点。
- 重复步骤 (2) 和(3), 直至图中所有顶点都被访问过,搜索结束

以上面这个实图为例:
- 从顶点 V1出发, 访问 V1
- 在访问了顶点 V1 之后,选择第一个未被访问的邻接点 V2, 访问 V2。 以 V2为新顶点,重复此步, 访问 V4, V8 、 V5。 在访问了 V5 之后, 由于 V5 的邻接点都已被访问, 此步结束。
- 搜索从 V5 回到 V8, 由于同样的理由,搜索继续回到 V4, V2直至 V1, 此时由于 V1 的另一个邻接点未被访问, 则搜索又从 V1 到 V3, 再继续进行下去。 由此, 得到的顶点访间序列为:
V1-V2-V4-V8-V5-V3-V6-V7
显然, 深度优先搜索遍历连通图是一个递归的过程。 为了在遍历过程中便于区分顶点是否已被访问,需附设访问标志数组 visited[n] , 其初值为 “false”, 一旦某个顶点被访问,则其相应的分量置为 “true”
深度优先搜索遍历连通图
算法步骤:
- 从图中某个顶点 v 出发, 访问 v, 并置 visited[v]的值为 true。
- 依次检查 v 的所有邻接点 w, 如果 visited[w]的值为 false, 再从 w 出发进行递归遍历,直到图中所有顶点都被访问过
bool visited [MVNum) ;
void DFS(Graph G,int v)
{//从第 v 个顶点出发递归地深度优先遍历图G
cout<<v;visited[v)=true;
//访问标志数组, 其初值为 "false"
//访问第 v 个顶点, 并置访问标志数组相应分扯值为 true
for(w=FirstAdjVex(G,v);w>=O;w=NextAdjVex(G,v,w))
//依次检查 v 的所有邻接点 w , FirstAdjVex (G, v)表示 v 的第一个邻接点
//NextAdjVex(G,v,w)表示 v 相对于 w 的下一个邻接点, w>=0表示存在邻接点
if(!visited[w]) DFS(G,w); //对 v 的尚未访问的邻接顶点 w 递归调用 DFS
}
深度优先搜索遍历非连通图
void DFSTraverse(Graph G)
{//对非连通图G做深度优先遍历
for(v=O;v<G.vexnum;++v) visited[v]=false; //访问标志数组初始化
for(v=O;v<G.vexnum;++v)
if(!visited[v]) DFS(G,v);
}
采用邻接矩阵表示图的深度优先搜索遍历
void DFS_AM(AMGraph G,int v)
{//图G为邻接矩阵类型,从第v个顶点出发深度优先搜索遍历图G
cout<<v;visited[v]=true; //访问第v个顶点,并置访问标志数组相应分址值为true
for(w=O;w<G.vexnum;w++) //依次检查邻接矩阵 v所在的行
if((G.arcs[v] [w] !=O}&&(!visited[w]}} DFS(G,w};
//G.arcs[v] [w] ! =0表示w是v的邻接点, 如果w未访问, 则递归调用DFS
}
采用邻接表表示图的深度优先搜索遍历
void DFS_AL (ALGraph G,int v)
{//图G为邻接表类型, 从第v个顶点出发深度优先搜索遍历图G
cout<<v;visited[v]=true; //访问第v个顶点,并置访问标志数组相应分量值为true
p=G.vertices[v] .firstarc; //p指向v的边链表的第一个边结点
while(p!=NULL) //边结点非空
{
w=p->adjvex;//表示w是v的邻接点
if(!visited[w]) DFS(G,w); //如果口未访问, 则递归调用DFS
p=p->nextarc;//p指向下一个边结点
}
}
算法复杂度分析:
分析上述算法,在遍历图时,对图中每个顶点至多调用一次 DFS 函数,因为一旦某个顶点被标志成巳被访问,就不再从它出发进行搜索。 因此,遍历图的过程实质上是对每个顶点查找其邻接点的过程,其耗费的时间则取决于所采用的存储结构。 当用邻接矩阵表示图时,查找每个顶点的邻接点的时间复杂度为 O(n2), 其中 n为图中顶点数。而当以邻接表做图的存储结构时,查找邻接点的时间复杂度为O(e), 其中e为图中边数。由此, 当以邻接表做存储结构时,深度优先搜索遍历图的时间复杂度为 O(n + e)。
3.2 广度优先搜索
广度优先搜索(Breadth First Search, BFS)遍历类似于树的按层次遍历的过程
算法步骤:
- 从图中某个顶点v出发,访问v
- 依次访问v的各个未曾访问过的邻接点
- 分别从这些邻接点出发依次访问它们的邻接点, 并使 “先被访问的顶点的邻接点“ 先于”后被访问的顶点的邻接点” 被访问。重复步骤(3), 直至图中所有已被访问的顶点的邻接点都被访问到
和深度优先搜索类似,广度优先搜索在遍历的过程中也需要一个访问标志数组
广度优先搜索遍历连通图
算法步骤:
- 从图中某个顶点 v 出发, 访问 v, 并置 visited[v]的值为 true, 然后将 v 进队。
- 只要队列不空, 则重复下述操作:
队头顶点 u 出队;
依次检查 u 的所有邻接点 w, 如果 visited[w]的值为 false, 则访问 w, 并置 visited[w]的值为 true, 然后将 w 进队。
void BFS{Graph G,int v)
{ //按广度优先非递归遍历连通图G
cout<<v;visited[v]=true; //访问第v个顶点,并置访问标志数组相应分址值为true
InitQueue{Q); //辅助队列Q初始化, 置空
EnQueue{Q,v);//v进队
while ( ! QueueEmpty {Q)) // 队列非空
for(w=FirstAdjVex(G,u);w>=O;w=NextAdjVex(G,u,w))
//依次检查u的所有邻接点w, FirstAdjVex(G,u)表示u的第一个邻接点
//NextAdjVex(G,u,w)表示u相对于w的下一个邻接点,w>=0表示存在邻接点
if (!visited [w]) //w为u的尚未访问的邻接顶点
{
cout<<w; visited[w]=true; //访问 w, 并置访问标志数组相应分扯值为true
EnQueue (Q, w) ; //w进队
}
}
}
若是非连通图,上述遍历过程执行之后,图中一定还有顶点未被访问,需要从图中另选一个未被访问的顶点作为起始点,重复上述广度优先搜索过程,直到图中所有顶点均被访问过为止
分析上述算法,每个顶点至多进一次队列。
遍历图的过程实质上是通过边找邻接点的过程,因此广度优先搜索遍历图的时间复杂度和深度优先搜索遍历相同,即当用邻接矩阵存储时,时间复杂度为O(n2). 用邻接表存储时,时间复杂度为O(n+ e)。两种遍历方法的不同之处仅仅在于对顶点访问的顺序不同
4. 图的应用
介绍图的几个常用算法,包括最小生成树,最短路径、拓扑排序和关键路径算法。
4.1 最小生成树
普里姆 (Prim) 算法和克鲁斯卡尔 (Kruskal) 算法是两个利用 MST 性质构造最小生成树的算法。
4.1.1 普里姆算法
每次选择最小边时, 可能存在多条同样权值的边可选, 此时任选其一即可
其数据结构的构造如下
struct
{
VerTexType adjvex; //最小边在U中的那个顶点
ArcType lowcost; //最小边上的权值
} closedge [MVNum) ;
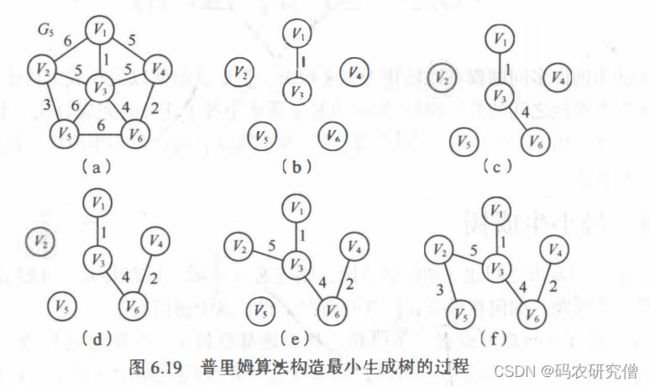
其算法步骤:
- 首先将初始顶点 u加入U中,对其余的每一个顶点 Vj, 将closedge[j]均初始化为到 u 的边信息。
- 循环 n -1 次, 做如下处理:
• 从各组边 closedge 中选出最小边 closedge[k], 输出此边;
• 将K加入U中;
• 更新剩余的每组最小边信息 closedge[j], 对于 v-u中的边, 新增加了一条从 K 到j 的边,如果新边的权值比 closed ge[i].lowcost 小,则将 closedge切.lowcost 更新为新边的权值。
void MiniSpanTree_Prim(AMGraph G,VerTexType u)
{//无向网G以邻接矩阵形式存储, 从顶点u出发构造G的最小生成树T, 输出T的各条边
k=LocateVex(G,u); //k 为顶点 u 的下标
for(j=O;j<G.vexnum;++j) //对v-u 的每一个顶点 Vj, 初始化 closedge[j]
if(j!=k) closedge[j]={u,G.arcs[k][j]}; //{adjvex, lowcost}
closedge[k].lowcost=O; //初始, U={u}
for(i=1;i<G.vexnum;++i)
{//选择其余 n-1 个顶点,生成 n-1 条边(n=G.vexnum)
k=Min(closedge);
//求出 T 的下一个结点:第 K 个顶点, closedge[k]中存有当前最小边
uO=closedge[k] .adjvex; // //uO 为最小边的一个顶点,uO属于U
vO=G.vexs[k]; //vO 为最小边的另一个顶点
cout<<uO<<vO; //输出当前的最小边(uO, vO)
closedge[k] .lowcost=O; //第k个顶点并入u集
for(j=O;j<G.vexnum;++j)
if(G.arcs[k] [j]<closedge[j] .lowcost) //新顶点并入u 后重新选择最小边
closedge [j]={G.vexs [k] ,G.arcs [k] [j]};
}
}
4.1.2 克鲁斯卡尔算法


可以看出,克鲁斯卡尔算法逐步增加生成树的边,与普里姆算法相比,可称为“加边法”。与普里姆算法一样, 每次选择最小边时, 可能有多条同样权值的边可选, 可以任选其一
算法步骤:
- 少将数组Edge中的元素按权值从小到大排序。
- 依次查看数组Edge中的边,循环执行以下操作:
• 依次从排好序的数组Edge中选出一条边(U1,U2)
• 在Vexset中分别查找V1和V2所在的连通分量VS1和VS2, 进行判断:
► 如果VS1和VS2不等,表明所选的两个顶点分属不同的连通分量,输出此边,并合并VS1和VS2两个连通分量
► 如果VS1和VS2相等,表明所选的两个顶点属于同一个连通分量,舍去此边而选择下一条权值最小的边
void MiniSpanTree_ Kruskal(AMGraph G)
{//无向网G以邻接矩阵形式存储,构造G的最小生成树T, 输出T的各条边
Sort (Edge); //将数组 Edge 中的元素按权值从小到大排序
for(i=O;i<G.vexnum;++i) //辅助数组,表示各顶点自成一个连通分址
Vexset[i]=i;
for(i=O;i<G.arcnum;++i) //辅助数组,表示各顶点自成一个连通分址
{
v1=LocateVex(G,Edge[i] .Head); //v1 为边的始点 Head 的下标
v2=LocateVex(G,Edge[i] .Tail); //v2 为边的终点 Ta过的下标
vs1=Vexset[v1]; //获取边 Edge[i]的始点所在的连通分址 vs1
vs2=Vexset[v2]; //获取边 Edge[i]的终点所在的连通分扯 vs2
if(vs1!=vs2) //边的两个顶点分属不同的连通分扯
{
cout«Edge[i] .Head «Edge[i] .Tail;//输出此边
for(j=O;j<G.vexnurn;++j) //合并 VS1 和 VS2 两个分量, 即两个集合统一编号
if(Vexset[j] ==vs2) Vexset [j] =vs1; //集合编号为 vs2 的都改为 vs1
}
}
}
对于包含e条边的网,上述算法排序时间是 O(elog2e)。在 for 循环中最耗时的操作是合并两个不同的连通分量,只要采取合适的数据结构,可以证明其执行时间为 O(log2e), 因此整个 for 循环的执行时间是 O(elog2e), 由此,
克鲁斯卡尔算法的时间复杂度为 O(elog2e),与网中的边数有关,与普里姆算法相比,克鲁斯卡尔算法更适合千求稀疏网的最小生成树
4.2 最短路径
最常见的最短路径问题: 一 种是求从某个源点到其余各顶点的最短路径,另一种是求每一对顶点之间的最短路径
4.2.1 迪杰斯特拉算法
从某个源点到其余各顶点的最短路径
算法的实现要引入以下辅助的数据结构。
- 一维数组S[i]: 记录从源点Vo到终点Vi ;是否已被确定最短路径长度, true表示确定,false表示尚未确定。
- 一维数组 Path[i]: 记录从源点 Vo到终点 Vi 的当前最短路径上 Vi的直接前驱顶点序号。其初值为:如果从 Vo到 Vi 有弧,则 Path [i]为 v。;否则为-1。
- 一维数组 D[i]: 记录从源点 Vo到终点 Vi 的当前最短路径长度。其初值为:如果从 v。到 Vi 有弧,则 D[i)为弧上的权值;否则为 ∞
其算法步骤如下:

void ShortestPath_DIJ(AMGraph G, int vO)
{ //用Dijkstra算法求有向网G的vO顶点到其余顶点的最短路径
n=G. vexnum; //n为G 中顶点的个数
for (v= O;v<n; ++v) //n个顶点依次初始化
{
S[v]=false; //S初始为空集
D[v]=G.arcs[vO][v];//将vO到各个终点的最短路径长度初始化为弧上的权值
if(D[v]<Maxlnt) Path[v]=vO; //如果vO和v之间有弧, 则将v的前驱置为vO
else Path[v]=-1; //如果vO 和v之间无弧, 则将v的前驱置为一1
}
S [vO] = true; //将vO加人 S
D[vO]=O;//源点到源点的距离为 0
for( i=1; i<n;++i) //对其余 n-1个顶点,依次进行计算
{
min= Maxlnt;
for(w= O;w<n;++w)
if (! S [w] &&D [w] <min)
{
v=w;min=D[w]; //选择一条当前的最短路径,终点为v
}
S[v]=true; //将v加入S
for(w=O;w<n;++w) //更新从v。出发到集合v-s上所有顶点的最短路径长度
if (! S [w) && (D [v) +G. arcs [v) [w) <D [w]))
{
D [w] =D [v] +G. arcs [v] [w];
Path[w]=v;
}
}
}
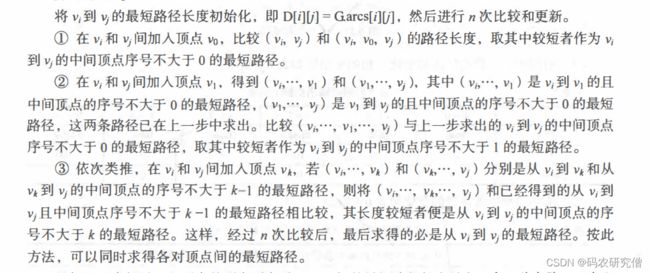
4.2.2 弗洛伊德算法
每一对顶点之间的最短路径
算法的实现要引入以 下辅助的数据结构。
(1) 二维数组 Path[i][j]:最短路径上顶点 Vj 的前一顶点的序号。
(2)二维数组D[i][j]:记录顶点 Vi和vj之间的最短路径长度。
算法步骤:
void ShortestPath_Floyd(AMGraph G)
{//用Floyd算法求有向网G中各对顶点1和)之间的最短路径
for (i=O; i < G. vexnum; ++i) //对结点之间初始已知路径及距离
for(j=O;j <G.vexnum;++j)
{
D [ i ] [ j ] =G. arcs [ i ] [ j ] ;
if(D[i] [j]<Maxint) Path[i] [j]=i; //如果 i和j之间有弧,则将j的前驱置为i.
else Path[i] [j]=-1; //如果 i和j之间无弧,则将j的前驱置为-1
}
for (k=O; k < G. vexnum; ++k)
for (i=O; i <G.vexnum;++i)
for(j=O;j <G.vexnum;++j)
if(D[i] [k]+D[k] [j] <D[i] [j])
{
D[i] [j]=D[i] [k]+D[k] [j];
Path[i] [j]=Path[k] [j];
}
}