卡尔曼滤波(KF)无迹卡尔曼滤波(UKF)
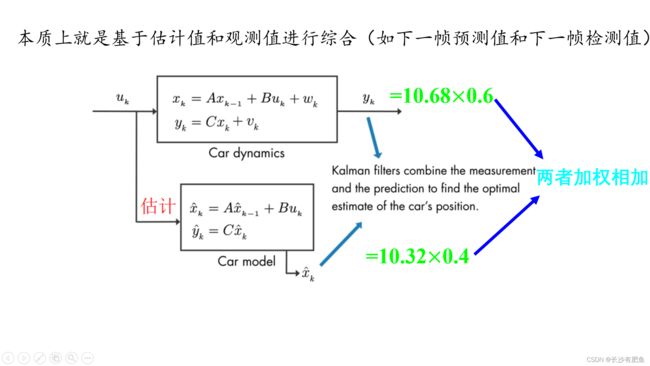
写在前面:卡尔曼滤波这一块比较晦涩难懂,通俗点讲,按我的理解就是利用已知信息去估计最优的位置,比如说,一个人或者一辆车下一时刻会在什么位置,卡尔曼滤波干的就是这个,利用相关的数学方法去算出下一个位置最可能在哪,其本质上是优化估计算法。
今天是6月7号,祝愿莘莘学子,金榜题名,今天高考的学生考上大学后,在查找资料时,这篇博客或许会被今天的一些学生看到,祝愿他们,愿他们青出于蓝而胜于蓝(因为我很菜),变成这方面的专家,到时候带带我!!
上面扯了这么多,大家如果看不清,可以从我的百度网盘里下载,文末有一些整理的代码,感兴趣的话,大家可以去研究一下!!
链接:https://pan.baidu.com/s/1MZNHKxtO3pgF6iWfp5pbyw
提取码:8888
看了B站这位大神的讲解,自己手写了一份,讲的挺好的,大家可以去看看(感谢大佬的讲解)
从放弃到精通!卡尔曼滤波从理论到实践~_哔哩哔哩_bilibili

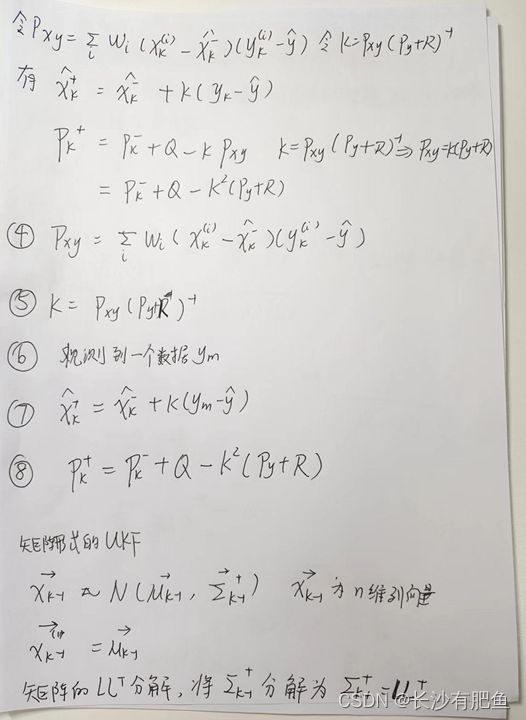
UKF推导:
贝叶斯滤波与卡尔曼滤波第十四讲 无迹卡尔曼滤波_哔哩哔哩_bilibili
感谢B站大佬的讲解,虽然手写了一遍,依旧看不懂(主要是我太菜),但是大佬很强,也很谦虚,非常感谢!!

































KF小例子:
# -*- coding=utf-8 -*- # Kalman filter example demo in Python # A Python implementation of the example given in pages 11-15 of "An # Introduction to the Kalman Filter" by Greg Welch and Gary Bishop, # University of North Carolina at Chapel Hill, Department of Computer # Science, TR 95-041, # coding:utf-8 import numpy import pylab # 这里是假设A=1,H=1的情况 # intial parameters n_iter = 50 sz = (n_iter,) # size of array x = -0.37727 # truth value (typo in example at top of p. 13 calls this z) z = numpy.random.normal(x,0.1,size=sz) # observations (normal about x, sigma=0.1) Q = 1e-5 # process variance # allocate space for arrays xhat=numpy.zeros(sz) # a posteri estimate of x P=numpy.zeros(sz) # a posteri error estimate xhatminus=numpy.zeros(sz) # a priori estimate of x Pminus=numpy.zeros(sz) # a priori error estimate K=numpy.zeros(sz) # gain or blending factor R = 0.1**2 # estimate of measurement variance, change to see effect # intial guesses xhat[0] = 0.0 P[0] = 1.0 for k in range(1,n_iter): # time update xhatminus[k] = xhat[k-1] #X(k|k-1) = AX(k-1|k-1) + BU(k) + W(k),A=1,BU(k) = 0 Pminus[k] = P[k-1]+Q #P(k|k-1) = AP(k-1|k-1)A' + Q(k) ,A=1 # measurement update K[k] = Pminus[k]/( Pminus[k]+R ) #Kg(k)=P(k|k-1)H'/[HP(k|k-1)H' + R],H=1 xhat[k] = xhatminus[k]+K[k]*(z[k]-xhatminus[k]) #X(k|k) = X(k|k-1) + Kg(k)[Z(k) - HX(k|k-1)], H=1 P[k] = (1-K[k])*Pminus[k] #P(k|k) = (1 - Kg(k)H)P(k|k-1), H=1 pylab.figure() pylab.plot(z,'k+',label='noisy measurements') #测量值 pylab.plot(xhat,'b-',label='a posteri estimate') #过滤后的值 pylab.axhline(x,color='g',label='truth value') #系统值 pylab.legend() pylab.xlabel('Iteration') pylab.ylabel('Voltage') pylab.figure() valid_iter = range(1,n_iter) # Pminus not valid at step 0 pylab.plot(valid_iter,Pminus[valid_iter],label='a priori error estimate') pylab.xlabel('Iteration') pylab.ylabel('$(Voltage)^2$') pylab.setp(pylab.gca(),'ylim',[0,.01]) pylab.show()
EKF小例子:
import numpy as np import math import matplotlib.pyplot as plt # Estimation parameter of EKF Q = np.diag([0.1, 0.1, np.deg2rad(1.0), 1.0])**2 R = np.diag([1.0, np.deg2rad(40.0)])**2 # Simulation parameter Qsim = np.diag([0.5, 0.5])**2 Rsim = np.diag([1.0, np.deg2rad(30.0)])**2 DT = 0.1 # time tick [s] SIM_TIME = 50.0 # simulation time [s] show_animation = True def calc_input(): v = 1.0 # [m/s] yawrate = 0.1 # [rad/s] u = np.matrix([v, yawrate]).T return u def observation(xTrue, xd, u): xTrue = motion_model(xTrue, u) # add noise to gps x-y zx = xTrue[0, 0] + np.random.randn() * Qsim[0, 0] zy = xTrue[1, 0] + np.random.randn() * Qsim[1, 1] z = np.matrix([zx, zy]) # add noise to input ud1 = u[0, 0] + np.random.randn() * Rsim[0, 0] ud2 = u[1, 0] + np.random.randn() * Rsim[1, 1] ud = np.matrix([ud1, ud2]).T xd = motion_model(xd, ud) return xTrue, z, xd, ud def motion_model(x, u): F = np.matrix([[1.0, 0, 0, 0], [0, 1.0, 0, 0], [0, 0, 1.0, 0], [0, 0, 0, 0]]) B = np.matrix([[DT * math.cos(x[2, 0]), 0], [DT * math.sin(x[2, 0]), 0], [0.0, DT], [1.0, 0.0]]) x = F * x + B * u return x def observation_model(x): # Observation Model H = np.matrix([ [1, 0, 0, 0], [0, 1, 0, 0] ]) z = H * x return z def jacobF(x, u): """ Jacobian of Motion Model motion model x_{t+1} = x_t+v*dt*cos(yaw) y_{t+1} = y_t+v*dt*sin(yaw) yaw_{t+1} = yaw_t+omega*dt v_{t+1} = v{t} so dx/dyaw = -v*dt*sin(yaw) dx/dv = dt*cos(yaw) dy/dyaw = v*dt*cos(yaw) dy/dv = dt*sin(yaw) """ yaw = x[2, 0] v = u[0, 0] jF = np.matrix([ [1.0, 0.0, -DT * v * math.sin(yaw), DT * math.cos(yaw)], [0.0, 1.0, DT * v * math.cos(yaw), DT * math.sin(yaw)], [0.0, 0.0, 1.0, 0.0], [0.0, 0.0, 0.0, 1.0]]) return jF def jacobH(x): # Jacobian of Observation Model jH = np.matrix([ [1, 0, 0, 0], [0, 1, 0, 0] ]) return jH def ekf_estimation(xEst, PEst, z, u): # Predict xPred = motion_model(xEst, u) jF = jacobF(xPred, u) PPred = jF * PEst * jF.T + Q # Update jH = jacobH(xPred) zPred = observation_model(xPred) y = z.T - zPred S = jH * PPred * jH.T + R K = PPred * jH.T * np.linalg.inv(S) xEst = xPred + K * y PEst = (np.eye(len(xEst)) - K * jH) * PPred return xEst, PEst def plot_covariance_ellipse(xEst, PEst): Pxy = PEst[0:2, 0:2] eigval, eigvec = np.linalg.eig(Pxy) if eigval[0] >= eigval[1]: bigind = 0 smallind = 1 else: bigind = 1 smallind = 0 t = np.arange(0, 2 * math.pi + 0.1, 0.1) a = math.sqrt(eigval[bigind]) b = math.sqrt(eigval[smallind]) x = [a * math.cos(it) for it in t] y = [b * math.sin(it) for it in t] angle = math.atan2(eigvec[bigind, 1], eigvec[bigind, 0]) R = np.matrix([[math.cos(angle), math.sin(angle)], [-math.sin(angle), math.cos(angle)]]) fx = R * np.matrix([x, y]) px = np.array(fx[0, :] + xEst[0, 0]).flatten() py = np.array(fx[1, :] + xEst[1, 0]).flatten() plt.plot(px, py, "--r") def main(): print(__file__ + " start!!") time = 0.0 # State Vector [x y yaw v]' xEst = np.matrix(np.zeros((4, 1))) xTrue = np.matrix(np.zeros((4, 1))) PEst = np.eye(4) xDR = np.matrix(np.zeros((4, 1))) # Dead reckoning # history hxEst = xEst hxTrue = xTrue hxDR = xTrue hz = np.zeros((1, 2)) while SIM_TIME >= time: time += DT u = calc_input() xTrue, z, xDR, ud = observation(xTrue, xDR, u) xEst, PEst = ekf_estimation(xEst, PEst, z, ud) # store data history hxEst = np.hstack((hxEst, xEst)) hxDR = np.hstack((hxDR, xDR)) hxTrue = np.hstack((hxTrue, xTrue)) hz = np.vstack((hz, z)) if show_animation: plt.cla() plt.plot(hz[:, 0], hz[:, 1], ".g") plt.plot(np.array(hxTrue[0, :]).flatten(), np.array(hxTrue[1, :]).flatten(), "-b") plt.plot(np.array(hxDR[0, :]).flatten(), np.array(hxDR[1, :]).flatten(), "-k") plt.plot(np.array(hxEst[0, :]).flatten(), np.array(hxEst[1, :]).flatten(), "-r") plot_covariance_ellipse(xEst, PEst) plt.axis("equal") plt.grid(True) plt.pause(0.001) if __name__ == '__main__': main()
最后整理了一些代码,有需要的可以自己下载去看看,哪些可以用到,卡尔曼滤波的博大精深不是一时半会就搞定的,哎,真的好难呀,希望大家多多指教!!
链接:https://pan.baidu.com/s/1aeyGpRS5uqHq4U2NAqdh5w
提取码:8888

