【目标检测】60、MMYOLO | 如何使用 MMYOLO 训练模型

文章目录
- 一、MMYOLO 简介
-
- 1.1 MMYOLO 的安装和简单训练
- 1.2 详细配置参数
- 1.3 构建 Cat 数据集的 Config 文件
-
- 1.3.1 数据集分布可视化
- 1.3.2 Anchor-based 方法中 anchor 尺寸的优化
- 1.3.3 可视化数据处理
- 二、MMYOLO 的框架结构
-
- 2.1 以 YOLOv5 为例来说明 MMYOLO 的框架结构
-
- 2.1.1 Backbone
- 2.1.2 Neck
- 2.1.3 Head
- 2.2 YOLO 系列算法如何进行正负样本分配
代码链接:https://github.com/open-mmlab/mmyolo/tree/main
相关文档:
1、自定义数据集 标注+训练+测试+部署 全流程
2、10分钟带你换遍主干网络
3、10 分钟轻松掌握大图推理
4、特征图可视化
5、配置文件解读
一、MMYOLO 简介
MMYOLO 是一个 YOLO 系列算法的开源库,该库支持一次环境配置调试多种模型,和 MMLab 系列的其他库类似,是一个很好用的学习和训练 YOLO 算法的库。
MMYOLO 统一了各个 YOLO 算法模块的实现,并提供了统一的测评流程,将 YOLO 算法解耦成不同的模块组件,通过组合不同的模块和训练策略可以便捷地构造自定义模型。
MMYOLO 截止 2023.01.18 所支持的算法:
- YOLOv5
- YOLOv6
- YOLOv7
- PPYOLOE
- RTMDet
- YOLOv8(dev 分支)
本文诸多内容摘自上面几个官方文档,更详尽的内容还需自行查阅官方文档。
1.1 MMYOLO 的安装和简单训练
conda create -n open-mmlab python=3.8 pytorch==1.10.1 torchvision==0.11.2 cudatoolkit=11.3 -c pytorch -y
conda activate open-mmlab
pip install openmim
mim install "mmengine>=0.3.1"
mim install "mmcv>=2.0.0rc1,<2.1.0"
mim install "mmdet>=3.0.0rc5,<3.1.0"
git clone https://github.com/open-mmlab/mmyolo.git
cd mmyolo
# Install albumentations
pip install -r requirements/albu.txt
# Install MMYOLO
mim install -v -e .
代码结构如下:

MMYOLO 数据的下载:
- COCO:
python tools/misc/download_dataset.py - Cat(自带小数据集,方便实验):
python tools/misc/download_dataset.py --dataset-name cat --unzip --delete --save-dir ./data/cat
训练:
python tools/train.py configs/custom_dataset/yolov5_s-v61_syncbn_fast_1xb32-100e_cat.py
测试:
python tools/test.py configs/custom_dataset/yolov5_s-v61_syncbn_fast_1xb32-100e_cat.py ./work_dirs/yolov6_s_syncbn_fast_1xb32-100e_cat/best_coco/bbox_mAP_epoch_96.pth
可视化:
python demo/image_demo.py ./data/cat/images \
./configs/custom_dataset/yolov6_s_syncbn_fast_1xb32-100e_cat.py \
./work_dirs/yolov6_s_syncbn_fast_1xb32-100e_cat/best_coco/bbox_mAP_epoch_96.pth \
--out-dir ./data/cat/pred_images
部署:
-
MMDeploy 框架进行部署
-
使用 projects/easydeploy 进行部署
1.2 详细配置参数
训练外部参数:
img_scale = (640, 640) # 高度,宽度
deepen_factor = 0.33 # 控制网络结构深度的缩放因子,YOLOv5-s 为 0.33
widen_factor = 0.5 # 控制网络结构宽度的缩放因子,YOLOv5-s 为 0.5
max_epochs = 300 # 最大训练轮次 300 轮
save_epoch_intervals = 10 # 验证间隔,每 10 个 epoch 验证一次
train_batch_size_per_gpu = 16 # 训练时单个 GPU 的 Batch size
train_num_workers = 8 # 训练时单个 GPU 分配的数据加载线程数
val_batch_size_per_gpu = 1 # 验证时单个 GPU 的 Batch size
val_num_workers = 2 # 验证时单个 GPU 分配的数据加载线程数
模型结构参数:
- model:配置检测算法组件
- backbone
- neck
- data_preprocessor
- train_cfg:训练超参数
- test_cfg:测试超参数
anchors = [[(10, 13), (16, 30), (33, 23)], # 多尺度的先验框基本尺寸
[(30, 61), (62, 45), (59, 119)],
[(116, 90), (156, 198), (373, 326)]]
strides = [8, 16, 32] # 先验框生成器的步幅
model = dict(
type='YOLODetector', #检测器名
data_preprocessor=dict( # 数据预处理器的配置,通常包括图像归一化和 padding
type='mmdet.DetDataPreprocessor', # 数据预处理器的类型,还可以选择 'YOLOv5DetDataPreprocessor' 训练速度更快
mean=[0., 0., 0.], # 用于预训练骨干网络的图像归一化通道均值,按 R、G、B 排序
std=[255., 255., 255.], # 用于预训练骨干网络的图像归一化通道标准差,按 R、G、B 排序
bgr_to_rgb=True), # 是否将图像通道从 BGR 转为 RGB
backbone=dict( # 主干网络的配置文件
type='YOLOv5CSPDarknet', # 主干网络的类别,目前可选用 'YOLOv5CSPDarknet', 'YOLOv6EfficientRep', 'YOLOXCSPDarknet' 3种
deepen_factor=deepen_factor, # 控制网络结构深度的缩放因子
widen_factor=widen_factor, # 控制网络结构宽度的缩放因子
norm_cfg=dict(type='BN', momentum=0.03, eps=0.001), # 归一化层(norm layer)的配置项
act_cfg=dict(type='SiLU', inplace=True)), # 激活函数(activation function)的配置项
neck=dict(
type='YOLOv5PAFPN', # 检测器的 neck 是 YOLOv5FPN,我们同样支持 'YOLOv6RepPAFPN', 'YOLOXPAFPN'
deepen_factor=deepen_factor, # 控制网络结构深度的缩放因子
widen_factor=widen_factor, # 控制网络结构宽度的缩放因子
in_channels=[256, 512, 1024], # 输入通道数,与 Backbone 的输出通道一致
out_channels=[256, 512, 1024], # 输出通道数,与 Head 的输入通道一致
num_csp_blocks=3, # CSPLayer 中 bottlenecks 的数量
norm_cfg=dict(type='BN', momentum=0.03, eps=0.001), # 归一化层(norm layer)的配置项
act_cfg=dict(type='SiLU', inplace=True)), # 激活函数(activation function)的配置项
bbox_head=dict(
type='YOLOv5Head', # bbox_head 的类型是 'YOLOv5Head', 我们目前也支持 'YOLOv6Head', 'YOLOXHead'
head_module=dict(
type='YOLOv5HeadModule', # head_module 的类型是 'YOLOv5HeadModule', 我们目前也支持 'YOLOv6HeadModule', 'YOLOXHeadModule'
num_classes=80, # 分类的类别数量
in_channels=[256, 512, 1024], # 输入通道数,与 Neck 的输出通道一致
widen_factor=widen_factor, # 控制网络结构宽度的缩放因子
featmap_strides=[8, 16, 32], # 多尺度特征图的步幅
num_base_priors=3), # 在一个点上,先验框的数量
prior_generator=dict( # 先验框(prior)生成器的配置
type='mmdet.YOLOAnchorGenerator', # 先验框生成器的类型是 mmdet 中的 'YOLOAnchorGenerator'
base_sizes=anchors, # 多尺度的先验框基本尺寸
strides=strides), # 先验框生成器的步幅, 与 FPN 特征步幅一致。如果未设置 base_sizes,则当前步幅值将被视为 base_sizes。
),
test_cfg=dict(
multi_label=True, # 对于多类别预测来说是否考虑多标签,默认设置为 True
nms_pre=30000, # NMS 前保留的最大检测框数目
score_thr=0.001, # 过滤类别的分值,低于 score_thr 的检测框当做背景处理
nms=dict(type='nms', # NMS 的类型
iou_threshold=0.65), # NMS 的阈值
max_per_img=300)) # 每张图像 NMS 后保留的最大检测框数目
YOLOv5 的训练和测试数据流存在差异
1)YOLOv5 的训练数据流
dataset_type = 'CocoDataset' # 数据集类型,这将被用来定义数据集
data_root = 'data/coco/' # 数据的根路径
file_client_args = dict(backend='disk') # 文件读取后端的配置,默认从硬盘读取
pre_transform = [ # 训练数据读取流程
dict(
type='LoadImageFromFile', # 第 1 个流程,从文件路径里加载图像
file_client_args=file_client_args), # 文件读取后端的配置,默认从硬盘读取
dict(type='LoadAnnotations', # 第 2 个流程,对于当前图像,加载它的注释信息
with_bbox=True) # 是否使用标注框(bounding box),目标检测需要设置为 True
]
albu_train_transforms = [ # YOLOv5-v6.1 仓库中,引入了 Albumentation 代码库进行图像的数据增广, 请确保其版本为 1.0.+
dict(type='Blur', p=0.01), # 图像模糊,模糊概率 0.01
dict(type='MedianBlur', p=0.01), # 均值模糊,模糊概率 0.01
dict(type='ToGray', p=0.01), # 随机转换为灰度图像,转灰度概率 0.01
dict(type='CLAHE', p=0.01) # CLAHE(限制对比度自适应直方图均衡化) 图像增强方法,直方图均衡化概率 0.01
]
train_pipeline = [ # 训练数据处理流程
*pre_transform, # 引入前述定义的训练数据读取流程
dict(
type='Mosaic', # Mosaic 数据增强方法
img_scale=img_scale, # Mosaic 数据增强后的图像尺寸
pad_val=114.0, # 空区域填充像素值
pre_transform=pre_transform), # 之前创建的 pre_transform 训练数据读取流程
dict(
type='YOLOv5RandomAffine', # YOLOv5 的随机仿射变换
max_rotate_degree=0.0, # 最大旋转角度
max_shear_degree=0.0, # 最大错切角度
scaling_ratio_range=(0.5, 1.5), # 图像缩放系数的范围
border=(-img_scale[0] // 2, -img_scale[1] // 2), # 从输入图像的高度和宽度两侧调整输出形状的距离
border_val=(114, 114, 114)), # 边界区域填充像素值
dict(
type='mmdet.Albu', # mmdet 中的 Albumentation 数据增强
transforms=albu_train_transforms, # 之前创建的 albu_train_transforms 数据增强流程
bbox_params=dict(
type='BboxParams',
format='pascal_voc',
label_fields=['gt_bboxes_labels', 'gt_ignore_flags']),
keymap={
'img': 'image',
'gt_bboxes': 'bboxes'
}),
dict(type='YOLOv5HSVRandomAug'), # HSV通道随机增强
dict(type='mmdet.RandomFlip', prob=0.5), # 随机翻转,翻转概率 0.5
dict(
type='mmdet.PackDetInputs', # 将数据转换为检测器输入格式的流程
meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', 'flip',
'flip_direction'))
]
train_dataloader = dict( # 训练 dataloader 配置
batch_size=train_batch_size_per_gpu, # 训练时单个 GPU 的 Batch size
num_workers=train_num_workers, # 训练时单个 GPU 分配的数据加载线程数
persistent_workers=True, # 如果设置为 True,dataloader 在迭代完一轮之后不会关闭数据读取的子进程,可以加速训练
pin_memory=True, # 开启锁页内存,节省 CPU 内存拷贝时间
sampler=dict( # 训练数据的采样器
type='DefaultSampler', # 默认的采样器,同时支持分布式和非分布式训练。请参考 https://github.com/open-mmlab/mmengine/blob/main/mmengine/dataset/sampler.py
shuffle=True), # 随机打乱每个轮次训练数据的顺序
dataset=dict( # 训练数据集的配置
type=dataset_type,
data_root=data_root,
ann_file='annotations/instances_train2017.json', # 标注文件路径
data_prefix=dict(img='train2017/'), # 图像路径前缀
filter_cfg=dict(filter_empty_gt=False, min_size=32), # 图像和标注的过滤配置
pipeline=train_pipeline)) # 这是由之前创建的 train_pipeline 定义的数据处理流程
2)YOLOv5 的测试数据流
测试阶段采用 Letter Resize 的方法来将所有的测试图像统一到相同尺度,进而有效保留了图像的长宽比。因此我们在验证和评测时,都采用相同的数据流进行推理。
test_pipeline = [ # 测试数据处理流程
dict(
type='LoadImageFromFile', # 第 1 个流程,从文件路径里加载图像
file_client_args=file_client_args), # 文件读取后端的配置,默认从硬盘读取
dict(type='YOLOv5KeepRatioResize', # 第 2 个流程,保持长宽比的图像大小缩放
scale=img_scale), # 图像缩放的目标尺寸
dict(
type='LetterResize', # 第 3 个流程,满足多种步幅要求的图像大小缩放
scale=img_scale, # 图像缩放的目标尺寸
allow_scale_up=False, # 当 ratio > 1 时,是否允许放大图像,
pad_val=dict(img=114)), # 空区域填充像素值
dict(type='LoadAnnotations', with_bbox=True), # 第 4 个流程,对于当前图像,加载它的注释信息
dict(
type='mmdet.PackDetInputs', # 将数据转换为检测器输入格式的流程
meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
'scale_factor', 'pad_param'))
]
val_dataloader = dict(
batch_size=val_batch_size_per_gpu, # 验证时单个 GPU 的 Batch size
num_workers=val_num_workers, # 验证时单个 GPU 分配的数据加载线程数
persistent_workers=True, # 如果设置为 True,dataloader 在迭代完一轮之后不会关闭数据读取的子进程,可以加速训练
pin_memory=True, # 开启锁页内存,节省 CPU 内存拷贝时间
drop_last=False, # 是否丢弃最后未能组成一个批次的数据
sampler=dict(
type='DefaultSampler', # 默认的采样器,同时支持分布式和非分布式训练
shuffle=False), # 验证和测试时不打乱数据顺序
dataset=dict(
type=dataset_type,
data_root=data_root,
test_mode=True, # 开启测试模式,避免数据集过滤图像和标注
data_prefix=dict(img='val2017/'), # 图像路径前缀
ann_file='annotations/instances_val2017.json', # 标注文件路径
pipeline=test_pipeline, # 这是由之前创建的 test_pipeline 定义的数据处理流程
batch_shapes_cfg=dict( # batch shapes 配置
type='BatchShapePolicy', # 确保在 batch 推理过程中同一个 batch 内的图像 pad 像素最少,不要求整个验证过程中所有 batch 的图像尺度一样
batch_size=val_batch_size_per_gpu, # batch shapes 策略的 batch size,等于验证时单个 GPU 的 Batch size
img_size=img_scale[0], # 图像的尺寸
size_divisor=32, # padding 后的图像的大小应该可以被 pad_size_divisor 整除
extra_pad_ratio=0.5))) # 额外需要 pad 的像素比例
test_dataloader = val_dataloader
3)测评
OpenMMLab 2.0 版本中评估器和 dataset 解耦,因此新版设计很容易实现 VOC dataset 使用coco metric 等类似需求。
val_evaluator = dict( # 验证过程使用的评测器
type='mmdet.CocoMetric', # 用于评估检测的 AR、AP 和 mAP 的 coco 评价指标
proposal_nums=(100, 1, 10), # 用于评估检测任务时,选取的Proposal数量
ann_file=data_root + 'annotations/instances_val2017.json', # 标注文件路径
metric='bbox', # 需要计算的评价指标,`bbox` 用于检测
)
test_evaluator = val_evaluator # 测试过程使用的评测器
由于测试数据集没有标注文件,因此 MMYOLO 中的 test_dataloader 和 test_evaluator 配置通常等于 val。 如果要保存在测试数据集上的检测结果,则可以像这样编写配置:
# 在测试集上推理,
# 并将检测结果转换格式以用于提交结果
test_dataloader = dict(
batch_size=1,
num_workers=2,
persistent_workers=True,
drop_last=False,
sampler=dict(type='DefaultSampler', shuffle=False),
dataset=dict(
type=dataset_type,
data_root=data_root,
ann_file=data_root + 'annotations/image_info_test-dev2017.json',
data_prefix=dict(img='test2017/'),
test_mode=True,
pipeline=test_pipeline))
test_evaluator = dict(
type='mmdet.CocoMetric',
ann_file=data_root + 'annotations/image_info_test-dev2017.json',
metric='bbox',
format_only=True, # 只将模型输出转换为coco的 JSON 格式并保存
outfile_prefix='./work_dirs/coco_detection/test') # 要保存的 JSON 文件的前缀
训练和测试的配置:
MMEngine 的 Runner 使用 Loop 控制训练、验证和测试
可以使用这些字段设置最大训练轮次和验证间隔
max_epochs = 300 # 最大训练轮次 300 轮
save_epoch_intervals = 10 # 验证间隔,每 10 轮验证一次
train_cfg = dict(
type='EpochBasedTrainLoop', # 训练循环的类型,请参考 https://github.com/open-mmlab/mmengine/blob/main/mmengine/runner/loops.py
max_epochs=max_epochs, # 最大训练轮次 300 轮
val_interval=save_epoch_intervals) # 验证间隔,每 10 个 epoch 验证一次
val_cfg = dict(type='ValLoop') # 验证循环的类型
test_cfg = dict(type='TestLoop') # 测试循环的类型
MMEngine 同时也支持动态评估间隔,可以在前面 280 epoch 训练阶段中,每间隔 10 个 epoch 验证一次,到最后 20 epoch 训练中每隔 1 个 epoch 验证一次,则配置写法为:
max_epochs = 300 # 最大训练轮次 300 轮
save_epoch_intervals = 10 # 验证间隔,每 10 轮验证一次
train_cfg = dict(
type='EpochBasedTrainLoop', # 训练循环的类型,请参考 https://github.com/open-mmlab/mmengine/blob/main/mmengine/runner/loops.py
max_epochs=max_epochs, # 最大训练轮次 300 轮
val_interval=save_epoch_intervals, # 验证间隔,每 10 个 epoch 验证一次
dynamic_intervals=[(280, 1)]) # 到 280 epoch 开始切换为间隔 1 的评估方式
val_cfg = dict(type='ValLoop') # 验证循环的类型
test_cfg = dict(type='TestLoop') # 测试循环的类型
1.3 构建 Cat 数据集的 Config 文件
_base_ = '../yolov5/yolov5_s-v61_syncbn_fast_8xb16-300e_coco.py'
max_epochs = 100 # 训练的最大 epoch
data_root = './data/cat/' # 数据集目录的绝对路径
# data_root = '/root/workspace/mmyolo/data/cat/' # Docker 容器里面数据集目录的绝对路径
# 结果保存的路径,可以省略,省略保存的文件名位于 work_dirs 下 config 同名的文件夹中
# 如果某个 config 只是修改了部分参数,修改这个变量就可以将新的训练文件保存到其他地方
work_dir = './work_dirs/yolov5_s-v61_syncbn_fast_1xb32-100e_cat'
# load_from 可以指定本地路径或者 URL,设置了 URL 会自动进行下载,因为上面已经下载过,我们这里设置本地路径
# 因为本教程是在 cat 数据集上微调,故这里需要使用 `load_from` 来加载 MMYOLO 中的预训练模型,这样可以在加快收敛速度的同时保证精度
load_from = './work_dirs/yolov5_s-v61_syncbn_fast_8xb16-300e_coco_20220918_084700-86e02187.pth' # noqa
# 根据自己的 GPU 情况,修改 batch size,YOLOv5-s 默认为 8卡 x 16bs
train_batch_size_per_gpu = 32
train_num_workers = 4 # 推荐使用 train_num_workers = nGPU x 4
save_epoch_intervals = 2 # 每 interval 轮迭代进行一次保存一次权重
# 根据自己的 GPU 情况,修改 base_lr,修改的比例是 base_lr_default * (your_bs / default_bs)
base_lr = _base_.base_lr / 4
anchors = [ # 此处已经根据数据集特点更新了 anchor,关于 anchor 的生成,后面小节会讲解
[(68, 69), (154, 91), (143, 162)], # P3/8
[(242, 160), (189, 287), (391, 207)], # P4/16
[(353, 337), (539, 341), (443, 432)] # P5/32
]
class_name = ('cat', ) # 根据 class_with_id.txt 类别信息,设置 class_name
num_classes = len(class_name)
metainfo = dict(
CLASSES=class_name, # 注意:这个字段在最新版本中换成了小写
PALETTE=[(220, 20, 60)] # 画图时候的颜色,随便设置即可
)
train_cfg = dict(
max_epochs=max_epochs,
val_begin=20, # 第几个 epoch 后验证,这里设置 20 是因为前 20 个 epoch 精度不高,测试意义不大,故跳过
val_interval=save_epoch_intervals # 每 val_interval 轮迭代进行一次测试评估
)
model = dict(
bbox_head=dict(
head_module=dict(num_classes=num_classes),
prior_generator=dict(base_sizes=anchors),
# loss_cls 会根据 num_classes 动态调整,但是 num_classes = 1 的时候,loss_cls 恒为 0
loss_cls=dict(loss_weight=0.5 *
(num_classes / 80 * 3 / _base_.num_det_layers))))
train_dataloader = dict(
batch_size=train_batch_size_per_gpu,
num_workers=train_num_workers,
dataset=dict(
_delete_=True,
type='RepeatDataset',
# 数据量太少的话,可以使用 RepeatDataset ,在每个 epoch 内重复当前数据集 n 次,这里设置 5 是重复 5 次
times=5,
dataset=dict(
type=_base_.dataset_type,
data_root=data_root,
metainfo=metainfo,
ann_file='annotations/trainval.json',
data_prefix=dict(img='images/'),
filter_cfg=dict(filter_empty_gt=False, min_size=32),
pipeline=_base_.train_pipeline)))
val_dataloader = dict(
dataset=dict(
metainfo=metainfo,
data_root=data_root,
ann_file='annotations/trainval.json',
data_prefix=dict(img='images/')))
test_dataloader = val_dataloader
val_evaluator = dict(ann_file=data_root + 'annotations/trainval.json')
test_evaluator = val_evaluator
optim_wrapper = dict(optimizer=dict(lr=base_lr))
default_hooks = dict(
# 设置间隔多少个 epoch 保存模型,以及保存模型最多几个,`save_best` 是另外保存最佳模型(推荐)
checkpoint=dict(
type='CheckpointHook',
interval=save_epoch_intervals,
max_keep_ckpts=5,
save_best='auto'),
param_scheduler=dict(max_epochs=max_epochs),
# logger 输出的间隔
logger=dict(type='LoggerHook', interval=10))
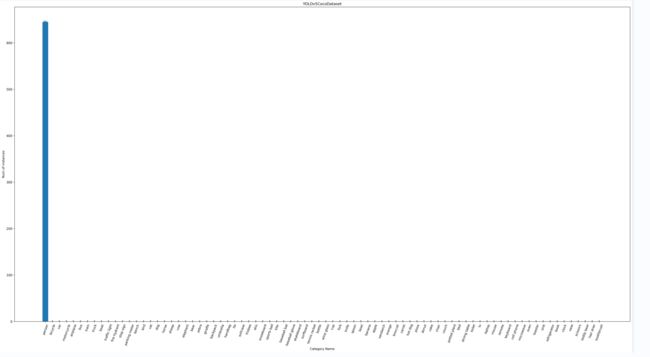
1.3.1 数据集分布可视化
可以使用 MMYOLO 自带的数据集可视化分析功能来分析不同数据集的特点,可以验证配置文件的正确性,也可以对数据集进行初步分析。
# 查看训练集的分布:
python tools/analysis_tools/dataset_analysis.py configs/custom_dataset/yolov5_s-v61_syncbn_fast_1xb32-100e_cat.py \
--out-dir work_dirs/dataset_analysis_cat/train_dataset
# 查看验证集的分布:
python tools/analysis_tools/dataset_analysis.py configs/custom_dataset/yolov5_s-v61_syncbn_fast_1xb32-100e_cat.py \
--out-dir work_dirs/dataset_analysis_cat/val_dataset \
--val-dataset
训练集信息:
这里显示的类别为 person,其实应该是 cat,不要纠结于这个类别,我在这里也只是尝试跑了一下而已,具体的内容是没有调试的。
Print current running information:
+--------------------------------------------------------------------+
| Dataset information |
+---------------+-------------+--------------+-----------------------+
| Dataset type | Class name | Function | Area rule |
+---------------+-------------+--------------+-----------------------+
| train_dataset | All classes | All function | [0, 32, 96, 100000.0] |
+---------------+-------------+--------------+-----------------------+
Read the information of each picture in the dataset:
[>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>] 580/580, 6437.8 task/s, elapsed: 0s, ETA: 0s
The information obtained is as follows:
+------------------------------------------------------------------------------------------------- -------+
| Information of dataset class |
+---------------+----------+----------------+----------+--------------+----------+------------+--- -------+
| Class name | Bbox num | Class name | Bbox num | Class name | Bbox num | Class name | Bb ox num |
+---------------+----------+----------------+----------+--------------+----------+------------+--- -------+
| person | 645 | umbrella | 0 | broccoli | 0 | vase | 0 |
| bicycle | 0 | handbag | 0 | carrot | 0 | scissors | 0 |
| car | 0 | tie | 0 | hot dog | 0 | teddy bear | 0 |
| motorcycle | 0 | suitcase | 0 | pizza | 0 | hair drier | 0 |
| airplane | 0 | frisbee | 0 | donut | 0 | toothbrush | 0 |
| bus | 0 | skis | 0 | cake | 0 | | |
| train | 0 | snowboard | 0 | chair | 0 | | |
| truck | 0 | sports ball | 0 | couch | 0 | | |
| boat | 0 | kite | 0 | potted plant | 0 | | |
| traffic light | 0 | baseball bat | 0 | bed | 0 | | |
| fire hydrant | 0 | baseball glove | 0 | dining table | 0 | | |
| stop sign | 0 | skateboard | 0 | toilet | 0 | | |
| parking meter | 0 | surfboard | 0 | tv | 0 | | |
| bench | 0 | tennis racket | 0 | laptop | 0 | | |
| bird | 0 | bottle | 0 | mouse | 0 | | |
| cat | 0 | wine glass | 0 | remote | 0 | | |
| dog | 0 | cup | 0 | keyboard | 0 | | |
| horse | 0 | fork | 0 | cell phone | 0 | | |
| sheep | 0 | knife | 0 | microwave | 0 | | |
| cow | 0 | spoon | 0 | oven | 0 | | |
| elephant | 0 | bowl | 0 | toaster | 0 | | |
| bear | 0 | banana | 0 | sink | 0 | | |
| zebra | 0 | apple | 0 | refrigerator | 0 | | |
| giraffe | 0 | sandwich | 0 | book | 0 | | |
| backpack | 0 | orange | 0 | clock | 0 | | |
+---------------+----------+----------------+----------+--------------+----------+------------+--- -------+
YOLOv5CocoDataset_bbox_num.jpg
YOLOv5CocoDataset_bbox_ratio.jpg

YOLOv5CocoDataset_bbox_wh.jpg

1.3.2 Anchor-based 方法中 anchor 尺寸的优化
MMYOLO 还支持优化 anchor-based 方法中的 anchor 尺寸,anchor-free 的方法可以跳过该步骤。
脚本为 tools/analysis_tools/optimize_anchors.py,支持下面三种 anchor 生成方式:
- k-means
- Differential Evolution
- v5-k-means
# 使用 yolov5-k-means 来进行优化的方式如下
python tools/analysis_tools/optimize_anchors.py configs/custom_dataset/yolov5_s-v61_syncbn_fast_1xb32-100e_cat.py \
--algorithm v5-k-means \
--input-shape 640 640 \
--prior-match-thr 4.0 \
--out-dir work_dirs/dataset_analysis_cat
可以根据得到的 anchor 尺寸来修改 config 中对应的 anchor 尺寸
值得注意的是 k-means 是聚类方法,存在一定随机性,与初始化有关,所以每次执行后得到的 anchor 都会有些不同,但都是基于数据集来生成的,所以不会有很大的影响。
简单介绍一下上面三种不同的 anchor 生成方式:
1)k-means
2)Differential Evolution
3)v5-k-means
1.3.3 可视化数据处理
脚本 tools/analysis_tools/browse_dataset.py 能够帮助用户直接可视化 config 配置中数据处理部分,同时可以选择保存可视化图片到指定文件夹内。
使用训练好的模型和对应的 config 文件来可视化图片,弹出显示,每张 3s,不保存:
python tools/analysis_tools/browse_dataset.py configs/custom_dataset/yolov5_s-v61_syncbn_fast_1xb32-100e_cat.py \
--show-interval 3
详细文档
二、MMYOLO 的框架结构
上图出处
MMYOLO 最核心的东西就在 mmyolo 库中
MMYOLO 将 YOLO 方法分成了以下几个模块:
- datasets:支持目标检测各种数据集
- transforms:包含各种数据增强变换
- models:包含组成模型的各个组件
- data_preprocessors:预处理模型的输入数据
- detectors:定义所欲检测模型类
- Backbone:base_backbone / cps_darknet / csp_resnet / cspnext / efficient_rep / yolov7_backbone
- Neck:base_yolo_neck / cspnext_pafpn / yolov5_fpn / yolov6_fpn / yolov7_fpn / yolox_fpn
- Head:yolov5_head / yolov6_head / yolov7_head / yolox_head / ppyoloe_head / rtmdet_head
- Loss:各种损失函数
- task_modules:assigners、samplers、box coders、prior generators
- layers:神经网络基本层
- engine:运行时组件的一部分
- optimizer:优化器
- hooks:runner 钩子
2.1 以 YOLOv5 为例来说明 MMYOLO 的框架结构
MMYOLO 的组织方式仍为:Backbone、Neck、Head
此处所说 YOLOv5 为 v6.0 版本,没有 Focus 了,替换成 conv 了,使用 SPPF 代替了 SPP
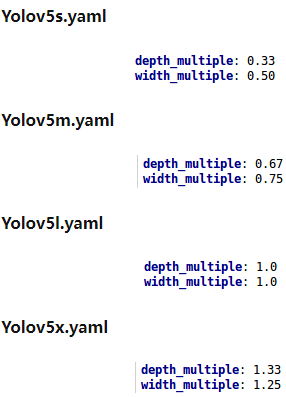
YOLOv5 模型一共有 4 个版本,分别为:
- YOLOv5s:深度、宽度最小(后面的逐渐加大)
- YOLOv5m
- YOLOv5l
- YOLOv5x
YOLOv5 的框架结构如下:
- Bckbone:CSPDarkNet
- Neck:PA-FPN
- Head:三种尺度,每个尺度的每个特征点上放置 3 种 anchor
YOLOv5 模型框架如下:

YOLOv5 模块细节如下:

2.1.1 Backbone
CSPDarkNet
YOLOv5-s 的 config 的 model 内容如下:
deepen_factor = 0.33
widen_factor = 0.5
model = dict(
type='YOLODetector',
data_preprocessor=dict(
type='mmdet.DetDataPreprocessor',
mean=[0., 0., 0.],
std=[255., 255., 255.],
bgr_to_rgb=True),
backbone=dict(
type='YOLOv5CSPDarknet',
deepen_factor=deepen_factor,
widen_factor=widen_factor,
norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
act_cfg=dict(type='SiLU', inplace=True)),
neck=dict(
type='YOLOv5PAFPN',
deepen_factor=deepen_factor,
widen_factor=widen_factor,
in_channels=[256, 512, 1024],
out_channels=[256, 512, 1024],
num_csp_blocks=3,
norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
act_cfg=dict(type='SiLU', inplace=True)),
bbox_head=dict(
type='YOLOv5Head',
head_module=dict(
type='YOLOv5HeadModule',
num_classes=num_classes,
in_channels=[256, 512, 1024],
widen_factor=widen_factor,
featmap_strides=strides,
num_base_priors=3),
prior_generator=dict(
type='mmdet.YOLOAnchorGenerator',
base_sizes=anchors,
strides=strides),
# scaled based on number of detection layers
loss_cls=dict(
type='mmdet.CrossEntropyLoss',
use_sigmoid=True,
reduction='mean',
loss_weight=0.5 * (num_classes / 80 * 3 / num_det_layers)),
loss_bbox=dict(
type='IoULoss',
iou_mode='ciou',
bbox_format='xywh',
eps=1e-7,
reduction='mean',
loss_weight=0.05 * (3 / num_det_layers),
return_iou=True),
loss_obj=dict(
type='mmdet.CrossEntropyLoss',
use_sigmoid=True,
reduction='mean',
loss_weight=1.0 * ((img_scale[0] / 640)**2 * 3 / num_det_layers)),
prior_match_thr=4.,
obj_level_weights=[4., 1., 0.4]),
test_cfg=dict(
multi_label=True,
nms_pre=30000,
score_thr=0.001,
nms=dict(type='nms', iou_threshold=0.65),
max_per_img=300))
YOLOv5 框架结构:
如何查看模型结构呢:
在 tools/train.py 的 line 109 后面打上断点:
else:
# build customized runner from the registry
# if 'runner_type' is set in the cfg
runner = RUNNERS.build(cfg)
import pdb; pdb.set_trace()
# start training
runner.train()
然后在终端输入 runner.model 即可拿到模型的结构,由于模型过长,这里简洁整理:
YOLODetector(
(data_preprocessor): YOLOv5DetDataPreprocessor()
(backbone): YOLOv5CSPDarknet()
(neck): YOLOv5PAFPN()
(bbox_head): YOLOv5Head()
)
Backbone 如下:
(backbone): YOLOv5CSPDarknet(
(stem): conv(in=3, out=32, size=6x6, s=2, pading=2) + BN + SiLU
(stage1): conv(in=32, out=64, size=3X3, s=2, pading=1) + BN + SiLU
CSPLayer:conv(in=64, out=32, size=1x1, s=1) + BN + SiLU
conv(in=64, out=32, size=1x1, s=1) + BN + SiLU
conv(in=64, out=64, size=1x1, s=1) + BN + SiLU
DarknetBottleNeck0:conv(in=32, out=32, size=1x1, s=1) + BN + SiLU
conv(in=32, out=32, size=3x3, s=1, padding=1) + BN + SiLU
(stage2): conv(in=64, out=128, size=3X3, s=2, pading=1) + BN + SiLU
CSPLayer:conv(in=128, out=64, size=1x1, s=1) + BN + SiLU
conv(in=128, out=64, size=1x1, s=1) + BN + SiLU
conv(in=128, out=128, size=1x1, s=1) + BN + SiLU
DarknetBottleNeck0:conv(in=64, out=64, size=1x1, s=1) + BN + SiLU
conv(in=64, out=64, size=3x3, s=1, padding=1) + BN + SiLU
DarknetBottleNeck1:conv(in=64, out=64, size=1x1, s=1) + BN + SiLU
conv(in=64, out=64, size=3x3, s=1, padding=1) + BN + SiLU
(stage3): conv(in=128, out=256, size=3X3, s=2, pading=1) + BN + SiLU
CSPLayer:conv(in=256, out=128, size=1x1, s=1) + BN + SiLU
conv(in=256, out=128, size=1x1, s=1) + BN + SiLU
conv(in=256, out=128, size=1x1, s=1) + BN + SiLU
DarknetBottleNeck0:conv(in=128, out=128, size=1x1, s=1) + BN + SiLU
conv(in=128, out=128, size=3x3, s=1, padding=1) + BN + SiLU
DarknetBottleNeck1:conv(in=128, out=128, size=1x1, s=1) + BN + SiLU
conv(in=128, out=128, size=3x3, s=1, padding=1) + BN + SiLU
DarknetBottleNeck2:conv(in=128, out=128, size=1x1, s=1) + BN + SiLU
conv(in=128, out=128, size=3x3, s=1, padding=1) + BN + SiLU
(stage4): conv(in=256, out=512, size=3X3, s=2, pading=1) + BN + SiLU
CSPLayer:conv(in=512, out=256, size=1x1, s=1) + BN + SiLU
conv(in=512, out=256, size=1x1, s=1) + BN + SiLU
conv(in=512, out=512, size=1x1, s=1) + BN + SiLU
DarknetBottleNeck0:conv(in=256, out=256, size=1x1, s=1) + BN + SiLU
conv(in=256, out=256, size=3x3, s=1, padding=1) + BN + SiLU
SPPF:conv(in=512, out=256, size=1x1, s=1) + BN + SiLU
maxpooling(size=5x5, s=1, padding=2, dilation=1)
conv(in=1024, out=512, size=1x1, s=1, padding=1) + BN + SiLU
整个模型框架结构如下:
(backbone): YOLOv5CSPDarknet(
(stem): ConvModule(
(conv): Conv2d(3, 32, kernel_size=(6, 6), stride=(2, 2), padding=(2, 2), bias=False)
(bn): BatchNorm2d(32, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(stage1): Sequential(
(0): ConvModule(
(conv): Conv2d(32, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(1): CSPLayer(
(main_conv): ConvModule(
(conv): Conv2d(64, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(short_conv): ConvModule(
(conv): Conv2d(64, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(final_conv): ConvModule(
(conv): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(blocks): Sequential(
(0): DarknetBottleneck(
(conv1): ConvModule(
(conv): Conv2d(32, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(conv2): ConvModule(
(conv): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
)
)
)
(stage2): Sequential(
(0): ConvModule(
(conv): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(1): CSPLayer(
(main_conv): ConvModule(
(conv): Conv2d(128, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(short_conv): ConvModule(
(conv): Conv2d(128, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(final_conv): ConvModule(
(conv): Conv2d(128, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(blocks): Sequential(
(0): DarknetBottleneck(
(conv1): ConvModule(
(conv): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(conv2): ConvModule(
(conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
(1): DarknetBottleneck(
(conv1): ConvModule(
(conv): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(conv2): ConvModule(
(conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
)
)
)
(stage3): Sequential(
(0): ConvModule(
(conv): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(1): CSPLayer(
(main_conv): ConvModule(
(conv): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(short_conv): ConvModule(
(conv): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(final_conv): ConvModule(
(conv): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(blocks): Sequential(
(0): DarknetBottleneck(
(conv1): ConvModule(
(conv): Conv2d(128, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(conv2): ConvModule(
(conv): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
(1): DarknetBottleneck(
(conv1): ConvModule(
(conv): Conv2d(128, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(conv2): ConvModule(
(conv): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
(2): DarknetBottleneck(
(conv1): ConvModule(
(conv): Conv2d(128, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(conv2): ConvModule(
(conv): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
)
)
)
(stage4): Sequential(
(0): ConvModule(
(conv): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn): BatchNorm2d(512, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(1): CSPLayer(
(main_conv): ConvModule(
(conv): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(short_conv): ConvModule(
(conv): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(final_conv): ConvModule(
(conv): Conv2d(512, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(512, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(blocks): Sequential(
(0): DarknetBottleneck(
(conv1): ConvModule(
(conv): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(conv2): ConvModule(
(conv): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
)
)
(2): SPPFBottleneck(
(conv1): ConvModule(
(conv): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(poolings): MaxPool2d(kernel_size=5, stride=1, padding=2, dilation=1, ceil_mode=False)
(conv2): ConvModule(
(conv): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(512, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
)
)
(neck): YOLOv5PAFPN(
(reduce_layers): ModuleList(
(0): Identity()
(1): Identity()
(2): ConvModule(
(conv): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
(upsample_layers): ModuleList(
(0): Upsample(scale_factor=2.0, mode=nearest)
(1): Upsample(scale_factor=2.0, mode=nearest)
)
(top_down_layers): ModuleList(
(0): Sequential(
(0): CSPLayer(
(main_conv): ConvModule(
(conv): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(short_conv): ConvModule(
(conv): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(final_conv): ConvModule(
(conv): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(blocks): Sequential(
(0): DarknetBottleneck(
(conv1): ConvModule(
(conv): Conv2d(128, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(conv2): ConvModule(
(conv): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
)
)
(1): ConvModule(
(conv): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
(1): CSPLayer(
(main_conv): ConvModule(
(conv): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(short_conv): ConvModule(
(conv): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(final_conv): ConvModule(
(conv): Conv2d(128, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(blocks): Sequential(
(0): DarknetBottleneck(
(conv1): ConvModule(
(conv): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(conv2): ConvModule(
(conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
)
)
)
(downsample_layers): ModuleList(
(0): ConvModule(
(conv): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(1): ConvModule(
(conv): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
(bottom_up_layers): ModuleList(
(0): CSPLayer(
(main_conv): ConvModule(
(conv): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(short_conv): ConvModule(
(conv): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(final_conv): ConvModule(
(conv): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(blocks): Sequential(
(0): DarknetBottleneck(
(conv1): ConvModule(
(conv): Conv2d(128, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(conv2): ConvModule(
(conv): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
)
)
(1): CSPLayer(
(main_conv): ConvModule(
(conv): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(short_conv): ConvModule(
(conv): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(final_conv): ConvModule(
(conv): Conv2d(512, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(512, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(blocks): Sequential(
(0): DarknetBottleneck(
(conv1): ConvModule(
(conv): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
(conv2): ConvModule(
(conv): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
(activate): SiLU(inplace=True)
)
)
)
)
)
(out_layers): ModuleList(
(0): Identity()
(1): Identity()
(2): Identity()
)
)
(bbox_head): YOLOv5Head(
(head_module): YOLOv5HeadModule(
(convs_pred): ModuleList(
(0): Conv2d(128, 18, kernel_size=(1, 1), stride=(1, 1))
(1): Conv2d(256, 18, kernel_size=(1, 1), stride=(1, 1))
(2): Conv2d(512, 18, kernel_size=(1, 1), stride=(1, 1))
)
)
(loss_cls): CrossEntropyLoss(avg_non_ignore=False)
(loss_bbox): IoULoss()
(loss_obj): CrossEntropyLoss(avg_non_ignore=False)
)
)
2.1.2 Neck
CSP-PAFPN
SPP 和 SPPF:
- SPP:Spatial Pyramid Poolig,是空间金字塔池化,并行的使用不同大小的池化方式,然后将得到的 maxpooling 输出特征图 concat 起来
- SPPF:Spatial Pyramid Poolig Fast,是空间金字塔池化的快速版本,计算量变小的,使用串行的方式,下一个 maxpooling 接收的是上一个 maxpooling 的输出,然后将所有 maxpooling 的输出 concat 起来
import time
import torch
import torch.nn as nn
class SPP(nn.Module):
def __init__(self):
super().__init__()
self.maxpool1 = nn.MaxPool2d(5, 1, padding=2)
self.maxpool2 = nn.MaxPool2d(9, 1, padding=4)
self.maxpool3 = nn.MaxPool2d(13, 1, padding=6)
def forward(self, x):
o1 = self.maxpool1(x)
o2 = self.maxpool2(x)
o3 = self.maxpool3(x)
return torch.cat([x, o1, o2, o3], dim=1)
class SPPF(nn.Module):
def __init__(self):
super().__init__()
self.maxpool = nn.MaxPool2d(5, 1, padding=2)
def forward(self, x):
o1 = self.maxpool(x)
o2 = self.maxpool(o1)
o3 = self.maxpool(o2)
return torch.cat([x, o1, o2, o3], dim=1)
2.1.3 Head
YOLOv5 的输出如下:
- 80x80x((5+Ncls)x3):每个特征点上都有 4 个 reg、1 个 置信度、Ncls 个类别得分
- 40x40x((5+Ncls)x3)
- 20x20x((5+Ncls)x3)
YOLOv5 中的 anchor:
# coco 初始设定 anchor 的宽高如下,每个尺度的 head 上放置 3 种 anchor
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
如何放置 anchor:
- 在 8 倍下采样特征图上(80x80)的每个特征点,分别放置宽高为 (10, 13)、(16, 30)、(33,23) 的 3 种 anchors
- 在 16 倍下采样特征图上(40x40)的每个特征点,分别放置宽高为 (30, 61)、(62, 45)、(59, 119) 的 3 种 anchors
- 在 32 倍下采样特征图上(20x20)的每个特征点,分别放置宽高为 (116, 90)、(156, 198)、(373,326) 的 3 种 anchors
2.2 YOLO 系列算法如何进行正负样本分配
YOLO 系列算法都是如何进行 anchor 正负的分配:
- YOLO 原本的思想就是 gt 框的中心点落入哪个特征点(其实也就是 v1 中的 grid),则由哪个特征点(head 特征图上的特征点可以看做原图的一个 grid)来负责预测该 gt
- YOLOv1 中,每个特征点输入 2 个预测框(7x7大小),训练的时候计算这两个预测框和 gt 的 IoU,保留 IoU 大的那个预测框作为该特征点最终的预测框,推理的时候保留 score(包含物体的可能性)大的那个框作为预测框,得到 7x7x(5x2+80)的结果向量。也就是将和 gt 的 IoU 最大的一个 anchor 作为正样本,其余作为负样本。
- YOLOv2 中,使用 k-means 的方法为每个特征点生成 5 个 anchor(特征图大小 13x13),计算该特征点上的 anchor 和中心落入该特征点的 gt 的 IoU,每个 gt 分配一个和其 IoU 最大的 anchor 作为正样本,IoU 小于设定阈值的(如 0.2)作为负样本。
- YOLOv3 中,类似 YOLOv2,使用 k-means 的方法为每个特征点生成 9 个 anchor(特征图大小 13x13, 26x26,52x52),每个尺度上有 3 个 anchor,仍然使用 max_iou 方法,每个 gt 分配一个和其 IoU 最大的 anchor 作为正样本,IoU 小于设定阈值的(如 0.2)作为负样本。
- YOLOv4 中,如果使用 max_iou 方法,只为每个 gt 分配一个正样本的话,可能还会导致一些目标的漏检,所以 YOLOv4 中将 和 gt 的 IoU 大于阈值的 anchor box,都视作正样本,小于设定阈值的作为负样本
- YOLOv5 中, 会将一个特征点分为四个象限,计算该 gt 的中心点处于四个象限中的哪一个,并将邻近的两个特征点也作为正样本。若 gt 偏向于右下角的象限,就会将 gt 所在 grid 的右边、下边特征点也作为正样本。
- YOLOv6 中,引入了 TAL 来进行正负样本分配,TAL 中引入了分类和回归是否对齐的衡量指标:anchor alignment metric t = s α × u β t = s^{\alpha} \times u^{\beta} t=sα×uβ,其中 s 为分类 score,u 为 IoU 的值,对于每个 gt,选择 m 个 t 值最大的 anchor 作为正样本,其他的 anchor 作为负样本,并且将 t 嵌入分类和回归损失函数实现动态分配。 L c l s = Σ i = 1 N p o s ∣ t i ^ − s i ∣ B C E ( s i , t i ^ ) + Σ j = 1 N n e g s j γ B C E ( s j , 0 ) L_{cls} = \Sigma_{i=1}^{N_{pos}} | \hat{t_i}-s_i|\ BCE(s_i, \hat{t_i}) +\Sigma_{j=1}^{N_{neg}}s_j^{\gamma}\ BCE(s_j, 0) Lcls=Σi=1Npos∣ti^−si∣ BCE(si,ti^)+Σj=1Nnegsjγ BCE(sj,0), L r e g = Σ i = 1 N p o s t i ^ L G I o U ( b i , b i ^ ) L_{reg} = \Sigma_{i=1}^{N_{pos}}\ \hat{t_i} \ L_{GIoU}(b_i, \hat{b_i}) Lreg=Σi=1Npos ti^ LGIoU(bi,bi^),TAL 的总训练损失为 L c l s + L r e g L_{cls}+L_{reg} Lcls+Lreg
- YOLOv7中,将 YOLOv5 和 YOLOX 中使用的 SimOTA 进行了结合,将 SimOTA 中的第一步 「使用中心先验」替换成 YOLOv5 中的象限选择策略。(SimOTA:求每个真值和 anchor 的传输花费,对于每个真值,在中心 center 区域选择花费最小的前 k 个 anchor 作为该 gt 的正样本)。
- YOLOv8中,也使用 TAL
