Proximal Policy Optimization (PPO)
目录
Policy Gradient
术语和基本思想
Policy Gradient
从on-policy到off-policy (反复多次使用经验)
术语和基本思想
PPO / TRPO
PPO2:
Policy Gradient
术语和基本思想
基本组成:
- actor (即policy gradient要学习的对象, 是我们可以控制的部分)
- 环境 environment (给定的,无法控制)
- 回报函数 reward function (无法控制)
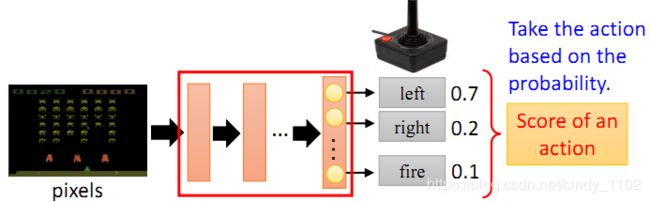
Policy of actor π:
如下图所示,Policy 可以理解为一个包含参数 θ的神经网络,该网络将观察到的变量作为模型的输入,基于概率输出对应的行动action
Episode:
游戏从开始到结束的一个完整的回合
actor的目标:
最大化总收益reward
Trajectory τ:
行动action和状态state的序列
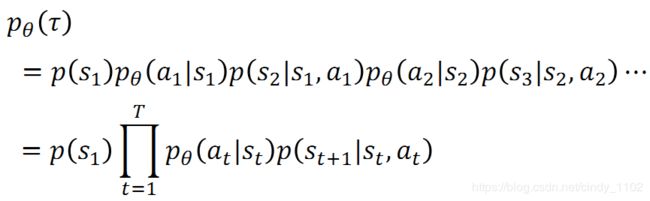
给定神经网络参数θ的情况下,出现行动状态序列 τ的概率:
以下概率的乘积:初始状态出现的概率;给定当前状态,采取某一个行动的概率;以及采取该行动之后,基于该行动以及当前状态返回下一个状态的概率,用公式表示为:
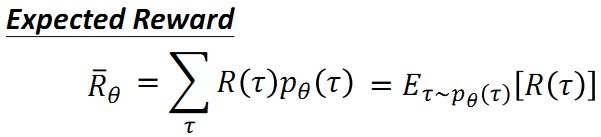
给定一个行动状态序列 τ, 我们可以得到它对应的收益reward,通过控制actor,我们可以得到不同的收益。由于actor采取的行动以及给定环境下出现某一个状态state是随机的,最终的目标是找到一个具有最大期望收益(即下述公式)的actor。
累积期望收益:采取某一个行动状态序列τ的概率, 以及该行动状态序列对应的收益reward的乘积之和。
Policy Gradient
得出目标函数之后,就需要根据目标函数求解目标函数最大值以及最大值对应的policy的参数 θ。类比深度学习中的梯度下降求最小值的方法,由于我们这里需要求的是目标函数的最大值,因此需要采取的方法是梯度上升。也就是说,思想起点是一样的,即需要求出目标函数的梯度。
求解梯度的步骤如下,以前文所述目标函数为基础,对参数 θ求导,其中,对概率加权的reward求和就是求reward的期望,因此有红框部分的改写,又因为训练的过程中会进行采样训练,采样个数为N,因此公式可以近似表示为N次采样得到的reward的平均。
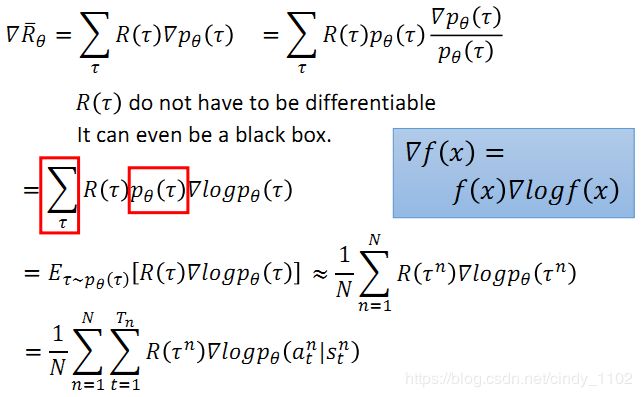
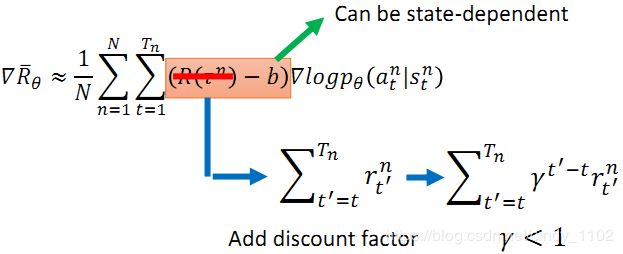
Tip 1: 添加基准线
由于训练过程中采样是随机的,可能会出现某个行动不被采样的情况,这会导致采取该行动的概率下降;另外,由于采取的行动概率和为1,可能存在归一化之后,好的action的概率相对下降,坏的action概率相对上升的情况,因此需要引入一个基准线baseline bb.
具体的例子:当policy决定采取的三个action a,b,c均有正的reward时,比如3,4,5,在计算各个action的概率的时候,本来应该给action c分配较大的概率,但是归一化之后,a的概率反而可能上升,c的概率可能会下降,与对应reward应该被分配的概率分布不符。但是引入baseline之后,可能a的reward会变为负,这样的话,采取该行动的概率就会下降。
Tip 2: 进一步考虑各个时间点的累积收益计算方式
考虑到在时间t采取的行动action与t时期之前的收益reward无关,因此只需要将t时刻开始到结束的reward进行加总。并且,由于行动action对随后各时间点的reward的影响会随着时间的推移而减小,因此加入折旧因子 γ。
这样就得到了一个考虑比较全面,比较完善的梯度计算方式。
从on-policy到off-policy (反复多次使用经验)
术语和基本思想
- On-policy: 学习到的agent以及和环境进行互动的agent是同一个agent
- Off-policy: 学习到的agent以及和环境进行互动的agent是不同的agent
为什么要引入 Off-policy:why off policy
如果我们使用 πθ 来收集数据,那么参数 θ 被更新后,我们需要重新对训练数据进行采样,这样会造成巨大的时间消耗。
目标:利用 πθ'来进行采样,将采集的样本拿来训练 θ , θ' 是固定的,采集的样本可以被重复使用。
原理:Important sampling
当我们只有通过另外一个分布得到的样本时,期望值可以做出以下更改,更换分布之后,需要使用重要性权重p(x)/q(x)来修正f(x).,这样就实现了使用q分布来计算p分布期望值。
l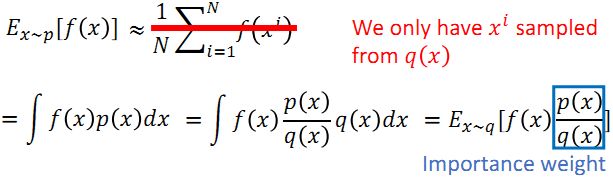
需要注意的是,两个分布p,q之间的差别不能太大,否则方差会出现较大的差别。
先基于原始的分布p计算函数的方差,然后计算引入不同分布q之后得到的函数方差,可以发现两者得出的方差表达式后面一项相同,主要差别在于前面那一项,如果分布p和q之间差别太大,会导致第一项的值较大或较小,于是造成两者较大的差别。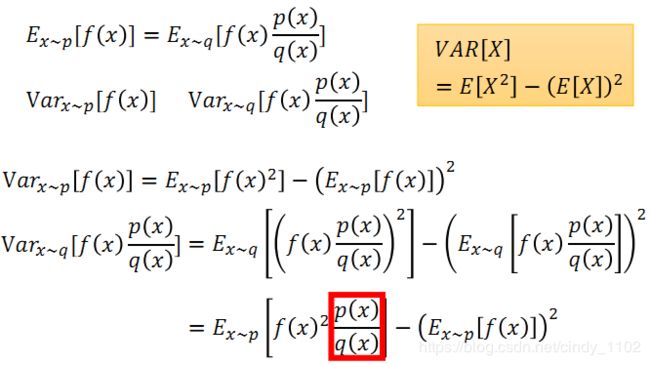
如果p,q两个分布的差别过大,在训练的过程中就需要进行更多次数的采样。
比如下图中,实际分布p和辅助分布q差别较大,横轴左边表示收益为负,右边表示收益为正。蓝色的线表示真实分布p的分布,主要集中在左边,也就是说,真实情况下reward的期望值应该是负的。
但是由于辅助分布q,即绿色线,主要集中在右侧,因此在采样的时候采到右边的概率更大,可能会导致多轮采样之后,算出来的期望收益依旧为正,只有当采样到左侧的点,并且乘上较大的修正系数 p/q之后,算出的结果才会变成真实的符号,负号。尽管采样到右侧的点修正系数很小,最终结果可能依旧是正确的,但这样会导致在采样上耗费较大的时间,因此,p q分布之间的差异依旧不宜过大。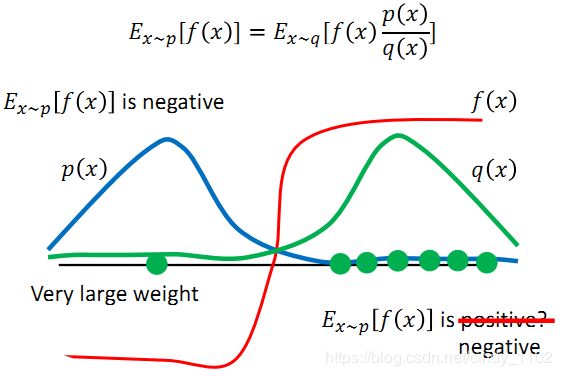
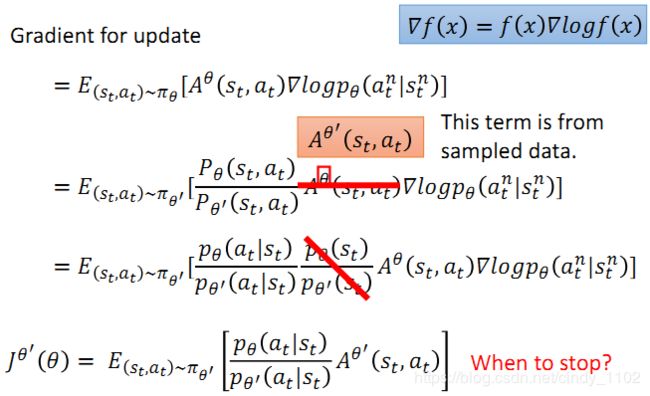
从上述important sampling的思想出发,可以使用该思想来达到上文所述的目标,即 “利用 πθ'来进行采样,将采集的样本拿来训练 θ , θ'是固定的,采集的样本可以被重复使用” 表示为:
提醒 :
- Advantage function (收益reward减去基准baseline) 也应该随着新的采样参数而变化(从基于θ的Aθ变为基于θ′的Aθ′)
- 在不同参数情况下,某一个状态state出现的概率几乎没有差别,因此可以将这一项近似地消掉
- stop criteria取决于两个分布之间的差别大小
加入约束: (θ不能与 θ'差别过大)
Tip: 这是一项加在行为上的约束,而不是加在参数上的约束
PPO / TRPO
PPO在原目标函数的基础上添加了KL divergence 部分,用来表示两个分布之前的差别,差别越大则该值越大。那么施加在目标函数上的惩罚也就越大,因此要尽量使得两个分布之间的差距小,才能保证较大的目标函数。
TRPO 与 PPO 之间的差别在于它使用了 KL divergence 作为约束。但是这使得TRPO相对而言更难计算,因此较少使用。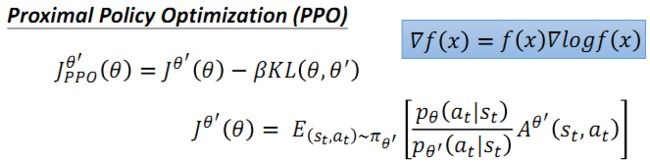
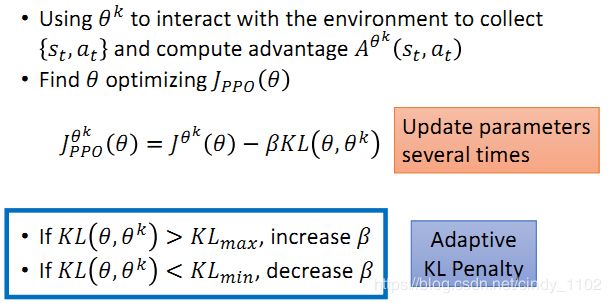
PPO 算法
- 初始化policy的参数 θ0
- 在每一次迭代中,使用θk来和环境互动,收集状态和行动并计算对应的advantage function
- 不断更新参数,找到目标函数最优值对应的参数 θ
在训练的过程中采用适应性的KL惩罚因子:
- 当KL过大时,增大beta值来加大惩罚力度
- 当KL过小时,减小beta值来降低惩罚力度
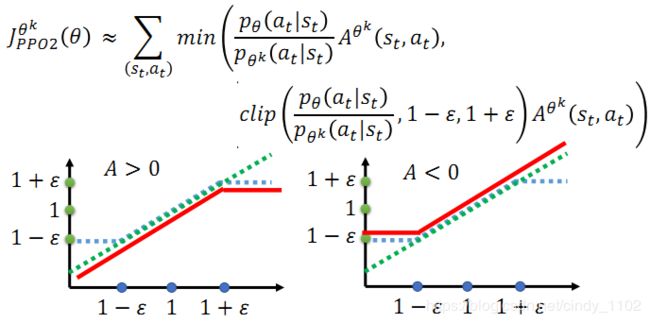
PPO2:
Tips:
- PPO2引入了Clip函数,意味着第二项,即蓝色的虚线必须在 1-ϵ 和 1+ϵ之间
- 红色的线表示取最小值之后整个函数值分布情况.