机器人导航学习历程(四)local planner
local planner
我们先来回顾一下Navigation的框架,可以看出位于红框中的local_planner是move_base节点的一部分,输入包括来自global_planner的全局的规划路径、里程计信息以及local_costmap的信息,输出是速度控制指令,作为控制器的输入。

base_local_planner
局部规划一般是用base_local_planner包实现的,该包使用Trajectory Rollout和**Dynamic Window approaches(DWA)**算法,根据地图数据,通过算法搜索到达目标的多条路经,利用一些评价标准(是否会撞击障碍物,所需要的时间等等)选取最优的路径,并且计算所需要的实时速度和角度。
DWA算法
这里有一张DWA算法的示意图,蓝色的方块表示机器人,红色表示障碍物,机器人前方的多条黑色虚线表示备选的路线(可以设置参数来调整虚线的数量,也可以设置参数来调整虚线的长度,虚线越多越长对计算资源的消耗越多,但也会得到更为精确的结果),DWA算法会对每条路线进行评分,最终选择得分最高的路线,而会导致碰撞发生的路线会被排除。

Trajectory Rollout和DWA算法的主要思路如下:
- 采样机器人当前的状态(dx,dy,dtheta);
- 针对每个采样的速度,计算机器人以该速度行驶一段时间后的状态,得出一条行驶的路线;
- 利用一些评价标准为多条路线打分;
- 根据打分,选择最优路径;
- 重复上面过程。
Trajectory Rollout和Dynamic Window Approach (DWA)两种方法,理论上来说分别对应base_local_planner和dwa_local_planner两个包,但其实dwa的大部分代码都放在了base_local_planner包里面。
类继承关系
base_local_planner类继承图如图所示。
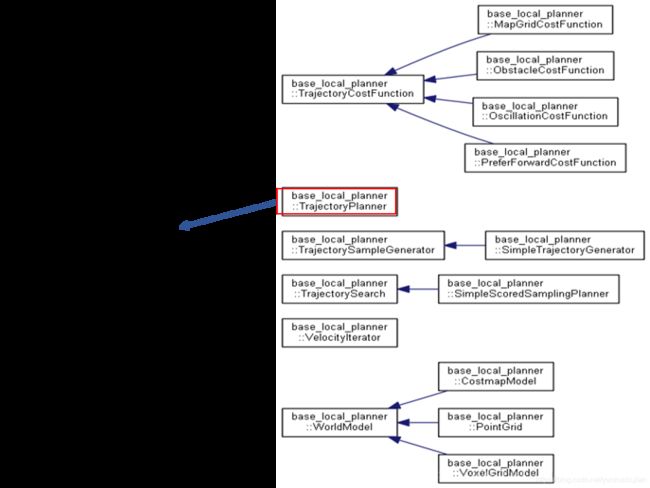
- TrajectoryPlanners(红框标出)实现了DWA 和Trajectory Rollout算法。
- TrajectorySampleGenerator产生一系列轨迹
- 然后TrajectoryCostFunction遍历轨迹打分
- TrajectorySearch找到最好的轨迹拿来给小车导航
- 由于小车不是一个质点,WorldModel会检查小车有没有碰到障碍物
teb_local_planner
teb_local_planner也是local planner的一个插件。teb即Timed Elastic Band,基本思路是根据轨迹执行时间、避障、动力学约束(如最大速度和最大加速度的限制)等来优化机器人的轨迹。
TEB算法
对于二维路径的描述,有一个有趣的方法,叫做Elatic Band(橡皮筋)。简而言之,就是连接起始、目标点,并让这个路径可以变形,变形的条件就是将所有约束当做橡皮筋的外力。
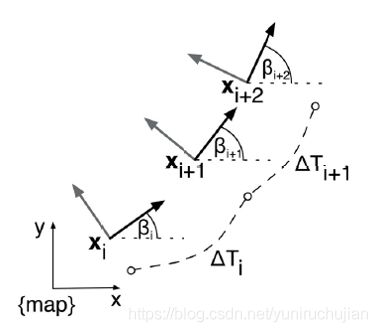
经典的“elastic band”由n个的机器人位姿组成的序列描述 X i = ( x i , y i , β i ) T X_i=(x_i,y_i,\beta_i)^T Xi=(xi,yi,βi)T,其中 x i x_i xi, y i y_i yi是机器人位置, β i \beta_i βi被定义为全局中机器人的方向。
Q = { X i } i = 0... n Q=\{X_i\}_{i=0...n} Q={Xi}i=0...n
为了显示轨迹的运动学信息,我们在点与点之间定义运动时间Time。于是,这个方法就叫做Timed-Elastic-Band。
TEB在原有的基础上加入了时间间隔序列:
τ = { Δ T i } i = 0... n − 1 \tau=\{\Delta{T_i}\}_{i=0...n-1} τ={ΔTi}i=0...n−1
每个时间间隔表示机器人需要从当前位姿转换到序列 Q Q Q中的下一个位姿所需要的时间。
因此,TEB由上述两个序列组成。
B : = ( Q , τ ) B:=(Q,\tau) B:=(Q,τ)
TEB算法的目标函数主要包括:
- 跟随全局路径+避开障碍物。跟随全局路径使得elastic bands靠近全局路径,而避障约束使得elastic bands远离障碍物。
- 速度和加速度限制。这一条限制即简单的不等式约束。
- 运动学限制。一般情况下机器人在平面运动只有两个自由度,其只能以朝向的方向直线运动或旋转。这种运动学约束使得机器人以有若干弧段组成的平滑的轨迹运动。对于某些机器人,会有最小转弯半径的约束(因为不能原地旋转)。
- 其他限制。比如使时间间隔序列的平方和最小。
我们的目标是进行局部的路径规划:
f ( B ) = ∑ k γ k f k ( B ) f(B)=\sum_{k}\gamma_kf_k(B) f(B)=k∑γkfk(B)
B ∗ = arg min B f ( B ) B^*=\arg\min_Bf(B) B∗=argBminf(B)
f ( B ) f(B) f(B)是全局目标函数,它是考虑各种约束的目标函数的加权和, B ∗ B^* B∗是被优化的TEB序列结果,也就是我们需要的局部规划的路径。
这是一个复杂的多目标优化问题,虽然看似复杂,但是这就是一个bundle adjustment问题。我们可以将它描述成图,然后用图优化进行求解。求解示例如下(转自:参考资料[2])。

如图,这个图的节点(vertexs)是橡皮筋的状态(机器人姿态+时间)。

图的边edges是我们自己定义的目标函数,这张图加入了速度约束。

这张图加入了加速度约束。
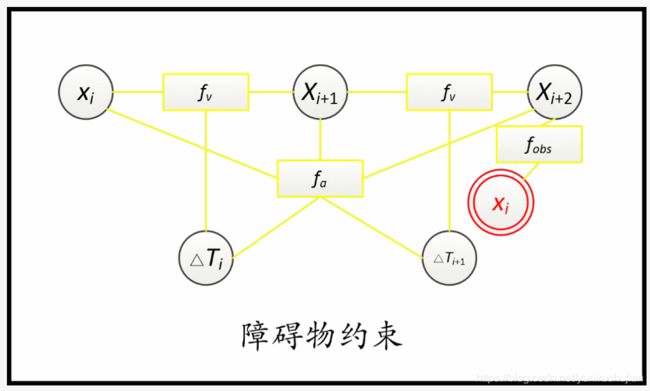
这张图加入了障碍物约束。
求解的框架,可以使用g2o(A General Framework for Graph Optimization)。当然,节点和边的类型需要我们自己使用g2o中的模板定义。
参考资料
[1] http://wiki.ros.org/base_local_planner
[2] https://www.leiphone.com/news/201612/0TCtaBOIcFOIBN69.html