视觉系统硬件选型简单概述
视觉系统硬件选型简单概述
机器视觉大体流程

照射光照射在目标表面,被目标物反射,反射光经过镜头进入相机,目标物的图像就会聚集在CCD图像单元上,
然后通过A/D转换成数字图像,再进行处理,最后输出结果
相机成像大体流程:

光线,经过镜头照射在感光传感器上(CCD或者CMOS),产生模拟电流信号,信号经过模数转换器转换成数字信号,然后传递到图像处理器SDP,得到图像,最后图像存储到存储器或者采集卡传入电脑。
相机的芯片分类

相机的芯片类型分类

相机的信号分类

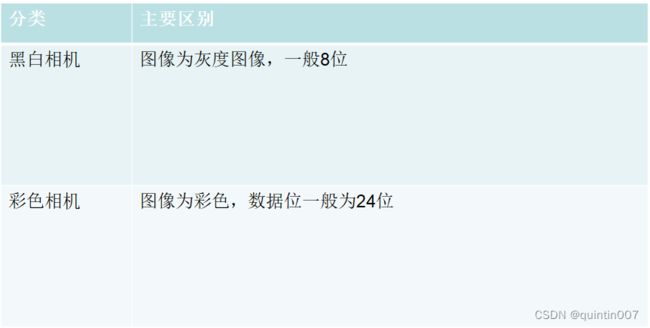
相机的颜色分类:
工业相机术语
分辨率
相机分辨率用于衡量相机对物像中明暗细节的分辨能力。
像元尺寸
1.像元大小和像元数(分辨率)共同决定了摄像机靶面的大小。
2.一般像元尺寸约小,制造难度越大,图像质量也约不容易提高。

芯片尺寸

通常芯片尺寸与分辨率是对应的,如500W相机2.2um像元为1/2.5
3.45um像元为2/3,4.8um像元为1英寸
芯片尺寸=像元尺寸X分辨率
精度
单位像素所代表的实际视野,数值越小精度越高
精度=视野÷分辨率
1200万像素相机(40003000 pix)拍摄视野为8060mm的图片,那么理论精度为多少?
80÷4000=0.02 mm/pix
理论精度为2丝
拖影
一次曝光时间里,物体移动超过一个像素,图像上就会产生拖影,因此可以计算出产生拖影的临界曝光时间。
曝光时间<=精度÷运动速度
需要拍摄理论精度0.1mm/pix,运动速度0.1米/秒的物体,最大曝光时间是多少?
0.1mm÷100mm/s=0.001s=1ms=1000μs
相机的选型
1.分辨率
客户提供其需要的精度与视野大小,那么求取分辨率关系如下:
分辨率(L/W)=视野(L/W)÷精度
假设视野3224mm精度要求0.05mm
那么相机的像素长度=32÷0.05=640 PIX
相当于需要 640480=307200=30W像素的相机
此计算为理论精度,并不代表系统精度。
2.颜色
通常视觉中我们选择黑白相机,只有需要彩色图像时才会考虑彩色相机,这是因为机器视觉中黑白图像的算法比较多,黑白相机使用光源成像质量要比彩色相机使用复合白光质量要好。
3.传感器类型
拍摄目标静态,为了节约成本优先考虑cmos相机。运动拍摄(飞拍)则优先考虑CCD相机。
4.传感器尺寸
在分辨率足够的情况下,优先使用尺寸大的像元,但同时需要考虑靶面大小,通常靶面越大,相机和镜头的价格越高。
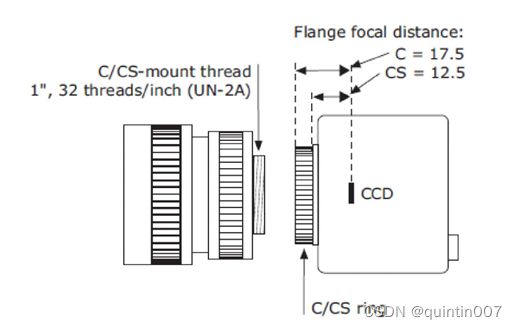
5.相机镜头接口
一般相机都是C/CS接口,需要考虑与镜头的对接。如果有其他接口的镜头,需要考虑相机的接口。
6.相机输出接口
同等价位像素条件下优先选择实际输出速度快的接口类型。
如CameraLink>USB3.0>GigE>1394>USB2.0 。
相机接口

工业镜头术语
焦距
镜头焦距是光学系统中衡量光的聚集或发散的度量方式,指从透镜中心到光聚集之焦点的距离。
镜头焦距的大小决定着视场角的大小,拍摄得工作距离,成像视野大小和景深大小。
常用的焦距有8.12.16.25.35.50等
光圈
一个用来控制光线透过镜头,进入相机感光面的装置。相对孔径一般刻在镜头上如1:2.8和1:4等。

分辨率
分辨率是代表镜头记录物体细节的能力,常以每毫米里面能分别黑白线对数量为计量单位:线对/毫米(lp/mm)
放大倍率
放大倍率定义为图像的大小与物体大小之比,在一个视场,成像大小铺满整个芯片,即:
放大倍率=芯片尺寸÷视野=像元尺寸÷精度
最小工作距离
镜头能够对焦清晰的最小工作距离。
景深
在对焦清晰的平面前后,存在一段仍然能够清晰成像的距离,称谓景深。通俗讲再聚焦完成后,在焦点前后范围内都能能够形成清晰的图像,这一前一后的距离范围叫景深。
畸变
镜头在成像时,特别是用焦距短的镜头拍摄大视场,图像会产生变形,这种情况叫做镜头的畸变。拍摄场景越大,所用镜头焦距约短,畸变程度越明显。
焦距计算:
CCTV镜头焦距: 焦距f=WD×(芯片尺寸长边÷FOV长边)
注意:当视野长宽比<芯片的长宽比时,需要用短边计算
远心镜头:
放大倍率=芯片尺寸长边÷FOV长边
注意:当视野长宽比<芯片的长宽比时,需要用短边计算
相机间参数相互影响的关系
1.焦距大小的影响情况
焦距越小,景深越大;
焦距越小,畸变越大;
焦距越小,渐晕现象越严重,使像差边缘照度降低。
2.像场中央与边缘
一般像场中心较边缘分辨率高;
一般像场中心较边缘光场照度高。
3.光圈大小的影响情况
光圈越大,图像亮度越高;
光圈越大,景深约小;
光圈越大,分辨率越高;
光圈越大,渐晕现象越严重,光场照度越不均匀。
4.光源波长的影响
在相同相机镜头参数条件下,光源波长越短,得到的图像分辨能力越高。 所以需要精密尺寸及位置测量的视觉系统中,尽量采用短波的单色光作 为照明光源,可以提高系统精度。