激光SLAM技术人工林点云构建及碳储量估算
在固碳测量中准确估算森林碳储量是整个固碳交易的基础。目前主要的森林碳储量估算方法包括样本土地盘查、微气象、遥感估算方法等。大多数学者通过无人机(UAV)和地面3D激光获得树点云。关于利用激光同步定位和映射(SLAM)技术获取树点云进行碳储量估算的研究很少。因此,本文采用激光SLAM技术获取人工林高精度树点云并提取树木信息参数,并在样地盘查法中采用体积衍生生物量法估算碳储量。
无人机倾斜摄影测量技术可以获得具有真实纹理的3D数据。但由于风的影响,树木摇晃很大,获得的树木航拍图像无法固定在同一位置。因此,最终开发的3D模型存在3D信息表达模糊和不完整的问题,这进一步使得无法获得树冠下的3D信息(如图1a所示)。因此,该技术无法完整准确地估计树木的碳储量。在建立树点云时,树底仍然缺少大量的三维点云(如图1b所示)。因此,利用激光SLAM技术构建树木三维点云,以其效率高、精度好等优点,适用于林业碳汇树碳储量的准确估算。

图1.不同技术的三维模型图(a)显示了无人机的三维模型(b)显示机载激光雷达的3D模型
实验区位于云南省昆明市昆明理工大学的一个小种植园内。我们利用三维激光SLAM技术构建了树木的三维点云,通过这些点云提取参数,最终估算了该人工林的碳储量。实验区域如图2所示。实验区人工林以樟脑、柏树为主。
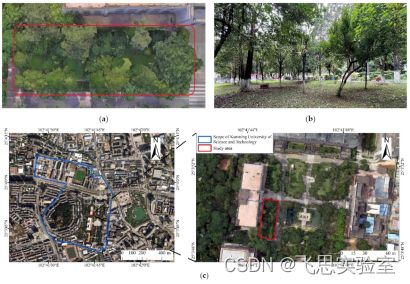
图2 实验区概况(a)显示整体(b)显示部分(c)研究区域的地理位置
采用GeoSLAM的ZEB-HORIZON三维激光扫描仪采集实验区人工林三维点云数据。它由移动电源供电(如图3所示)。它的最大测量范围为3米,视场为4°×100°,整体扫描精度为±360毫米,每秒可获取270万个扫描点。

图3 ZEB-地平线设备图
扫描仪在实验区手动收集数据。图4a显示了在整个实验区构建三维点云时采取的必要程序,包括环境调查,路径规划,设备调试和现场数据收集。根据该地区人工林的分布特点,规划了3条不同的路径进行三维点云数据采集,如图5所示。并通过路径实验选择最优路径。

图4 数据采集流程(a)显示数据采集流程图(b)显示实验区的数据收集情况

图5 路径规划图(a)显示一条笔直的路径(b)显示S形路径(c)显示圆形路径
在直线路径、S形线路径和环形路径三个路径图下构建的人工林三维点云如图6和图7所示。从直线路径的结果(图6a和图7a)来看,当GeoSLAM Hub软件处理种植园的构造点云时,激光里程表轨迹的求解显然存在误差。构建的点云没有呈现直线路径,导致特征匹配混乱,无法正确构造人工林的点云。S形路径(图6b和图7b)的结果表明,激光里程表轨迹经过软件处理后交叉,导致每个关键帧中的点云未对准。这进一步导致人工林点云的分层。环路(图6 c和图7c)的结果表明,利用种植园的完整特征信息正确求解了环路的激光里程表轨迹。因此,我们的实验表明,GeoSLAM Hub软件无法求解直线路径和S形线路径构建的人工林三维点云,循环路径是获得人工林三维点云的最佳选择。
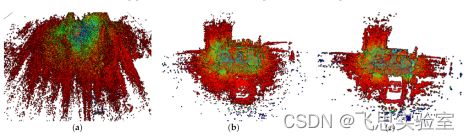
图6 人工林三条路径点的云图(a)显示直线路径(b)显示 S 线路径(c) 显示循环路径

图7 激光里程表三条路径图(a)显示直线路径错误(b)显示S型线路径错误;(c)显示循环路径
手持式数据采集是通过在激光雷达的下部增加一个手持手柄并修改要肩扛的连接电池来进行的,修改后的图7a如图8a所示。采用直线路径规划,首先将激光雷达连接到Ubuntu系统并进行调试,然后连接到ROS系统进行手持数据采集,如图8b所示。实验区的人工林通过ROS系统以Rosbag的形式记录在数据集中,以便于数据集的后续处理。

图8 设备数据采集示意图(a)手持式改装激光雷达图(b)显示数据采集图
经过数据采集和处理,ZEB-HORIZON扫描仪采集的点云数据存在大量的冗余点和噪声点。因此,使用CloudCompare软件SOR滤波器对点云进行去噪并有效裁剪点云。结果如图9所示。

图9 点云去噪和裁剪图(a)在去噪和裁剪之前显示(b)去噪和裁剪后显示
单一数据采集的人工林三维点云存在一定的不足。因此,对于大规模人工林点云的构建,进行数据融合(路径融合,如图10a所示)来构建完整的人工林点云,ZEB-HORIZON扫描仪主要用于采集点云数据(环路),辅以Livox Mid-14 LiDAR(线性路径)。将两类点云数据通过ICP算法融合,融合结果如图10b所示。

图10 数据融合图(a)显示路径融合(b)显示点云融合
去噪点云对地面点进行分类,并通过设置上下边界阈值来改变提取的地面关键点的稀疏性,旨在保留地面关键点的稀疏点集,提高数字高程模型(DEM)的构建速度。之后,对地面点执行点云过滤,最终结果如图11所示。地面分类后,基于冠层高度模型(CHM)分割算法对单树进行分割,分割结果如图 12所示。
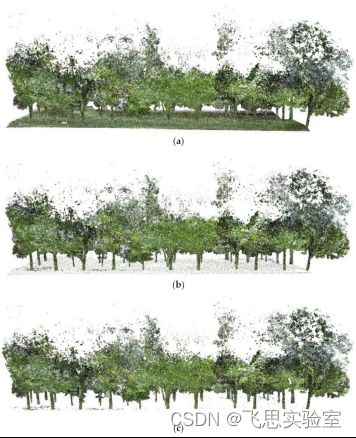
图11 地面点的分类和归一化(a) 显示原始点云(b)显示地面点的分类(c)显示地面点分类后的过滤
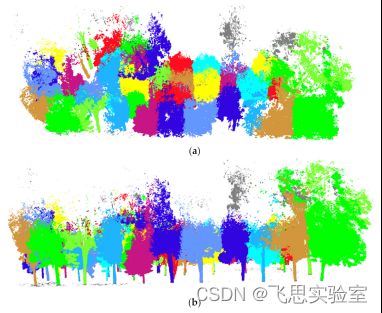
图12 单树分段图(a)俯视图(b)前视图
为了验证提取的单棵树参数的准确性,我们对激光SLAM扫描仪lidar360软件提取的单木参数和人工测量同一棵树提取的参数进行了精度分析,如图13所示。
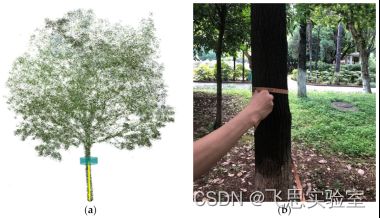
图13.不同方法的单木信息图(a)激光SLAM单木点云(b)显示手动测量图
激光SLAM技术可以快速准确地构建人工林的高精度三维点云。点云处理软件可以自动提取树木参数,可以进一步用于快速估算碳储量。由于在三维点云中对树种进行分类仍然困难,因此该方法通常仅适用于单种人工林或物种分布均匀的人工林的碳储量估算。我们的方法实现了碳储量估算的高精度。这可以为未来的碳储量估算研究提供参考。
源自:Appl. Sci. 2022, 12, 10838. https://doi.org/10.3390/app122110838