Dijikstra与Floyd两种最短路径算法的解析与Golang代码实现
1.Dijikstra算法理论
在一个带权图中,从某一个单源节点,走到其他节点,如何求得所有路径中的最短路径,是单元节点最短路径问题。而在路由算法中,与此类似,可以抽象出该模型来。迪杰斯特拉算法是由荷兰计算机科学家狄克斯特拉于1959 年提出的。是从一个顶点到其余各顶点的最短路径算法,解决的是有向图中最短路径问题。迪杰斯特拉算法主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。
Ø 基本思想
通过Dijkstra计算图G中的最短路径时,需要指定起点s(即从顶点s开始计算)。此外,引进两个集合S和U。S的作用是记录已求出最短路径的顶点(以及相应的最短路径长度),而U则是记录还未求出最短路径的顶点(以及该顶点到起点s的距离)。初始时,S中只有起点s;U中是除s之外的顶点,并且U中顶点的路径是”起点s到该顶点的路径”。然后,从U中找出路径最短的顶点,并将其加入到S中;接着,更新U中的顶点和顶点对应的路径。 然后,再从U中找出路径最短的顶点,并将其加入到S中;接着,更新U中的顶点和顶点对应的路径。 … 重复该操作,直到遍历完所有顶点。
Ø 操作步骤
\1. 初始时,S只包含起点s;U包含除s外的其他顶点,且U中顶点的距离为”起点s到该顶点的距离”[例如,U中顶点v的距离为(s,v)的长度,然后s和v不相邻,则v的距离为∞]。
\2. 从U中选出”距离最短的顶点k”,并将顶点k加入到S中;同时,从U中移除顶点k。
\3. 更新U中各个顶点到起点s的距离。之所以更新U中顶点的距离,是由于上一步中确定了k是求出最短路径的顶点,从而可以利用k来更新其它顶点的距离;例如,(s,v)的距离可能大于(s,k)+(k,v)的距离。
\4. 重复步骤(2)和(3),直到遍历完所有顶点。
Ø 图解
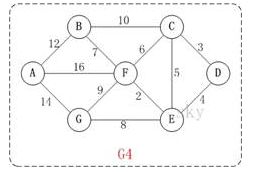
以上图G4为例,来对迪杰斯特拉进行算法演示(以第4个顶点D为起点)。以下B节点中23应为13。
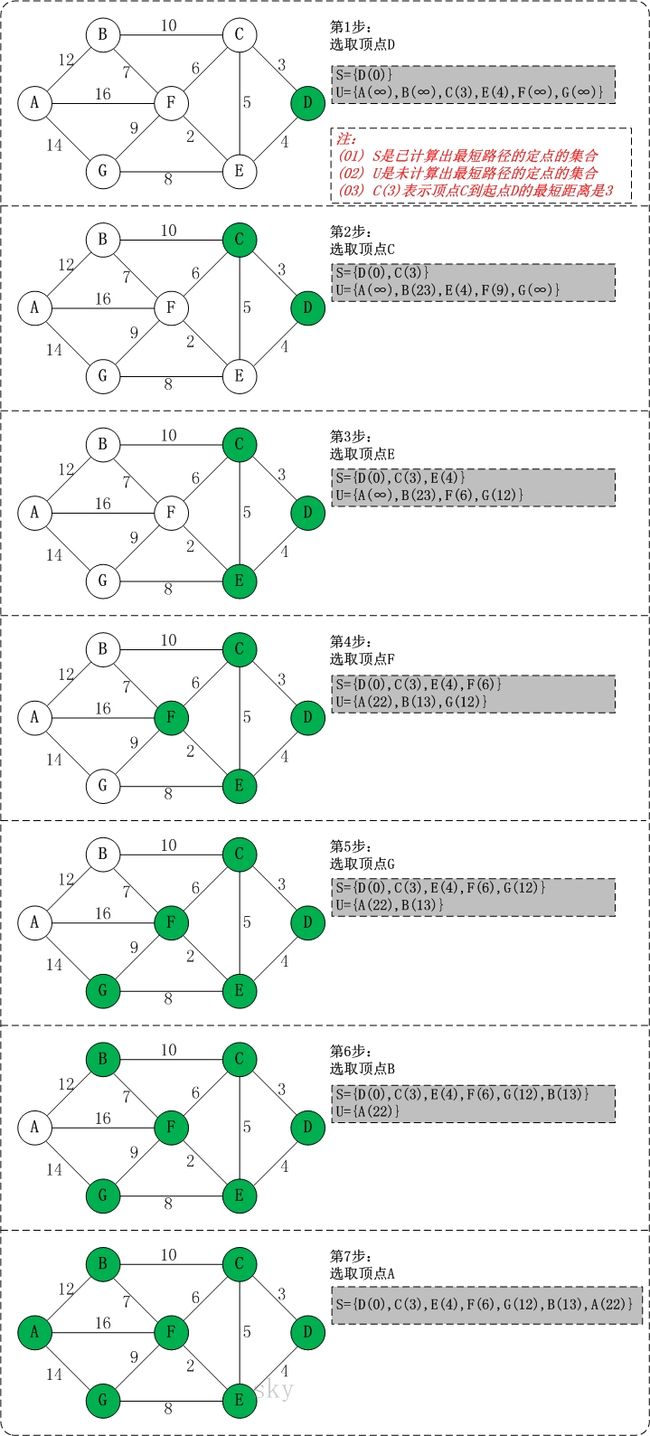
初始状态:S是已计算出最短路径的顶点集合,U是未计算除最短路径的顶点的集合!
第1步:将顶点D加入到S中。
此时,S={D(0)}, U={A(∞),B(∞),C(3),E(4),F(∞),G(∞)}。 注:C(3)表示C到起点D的距离是3。
第2步:将顶点C加入到S中。
上一步操作之后,U中顶点C到起点D的距离最短;因此,将C加入到S中,同时更新U中顶点的距离。以顶点F为例,之前F到D的距离为∞;但是将C加入到S之后,F到D的距离为9=(F,C)+(C,D)。
此时,S={D(0),C(3)}, U={A(∞),B(23),E(4),F(9),G(∞)}。
第3步:将顶点E加入到S中。
上一步操作之后,U中顶点E到起点D的距离最短;因此,将E加入到S中,同时更新U中顶点的距离。还是以顶点F为例,之前F到D的距离为9;但是将E加入到S之后,F到D的距离为6=(F,E)+(E,D)。
此时,S={D(0),C(3),E(4)}, U={A(∞),B(23),F(6),G(12)}。
第4步:将顶点F加入到S中。
此时,S={D(0),C(3),E(4),F(6)}, U={A(22),B(13),G(12)}。
第5步:将顶点G加入到S中。
此时,S={D(0),C(3),E(4),F(6),G(12)}, U={A(22),B(13)}。
第6步:将顶点B加入到S中。
此时,S={D(0),C(3),E(4),F(6),G(12),B(13)}, U={A(22)}。
第7步:将顶点A加入到S中。
此时,S={D(0),C(3),E(4),F(6),G(12),B(13),A(22)}。
此时,起点D到各个顶点的最短距离就计算出来了:A(22) B(13) C(3) D(0) E(4) F(6) G(12)。
2.Dijikstra算法的Golang实现
func Dijkstra_Alg(D [LEN][LEN]int, v int) {
if v < 0 || v >= LEN{
fmt.Println("错误节点输入!")
return
}
//替换一些原数组中的-1
for i:=0; i<LEN; i++ {
for j:=0; j<LEN; j++ {
if D[i][j] == -1{
D[i][j] = 9999999
}
}
}
//1. 创建S集合
S := make([]int, 0)
S = append(S, v)
//2. 对于当前顶点,做一次迪杰斯特拉算法
//看邻接表对应的那一列
for {
//2.1 找出当前列最小加入到S, 要排除掉已经在S中的点
min := 9999999
index := v
for i:=0; i<LEN; i++{
if !Contains(S, i) && D[i][v] < min{
min = D[i][v]
index = i
}
}
//填充之前判断一下,防止后面都是无穷大
if min == 9999999 && index == v{
break //如果最小的都是∞那么说明后面没有点可以加入了,所以结束
}
fmt.Printf("最小值min=%d, 加入节点%d \n", min, index)
S = append(S, index) //加入目前最小的到S中
//2.2 根据先加入的这个点,更新其他点的权重
for i:=0; i<LEN; i++ {
if !Contains(S, i) && D[i][index] + min < D[i][v]{
D[i][v] = D[i][index] + min
}
}
fmt.Println("集合S:", S)
//2.3 检测下S是否满了,满了就退出,不满就重复前两步
if len(S) >= LEN{
break
}
fmt.Println("===============================")
}
//输出数组看一下
fmt.Println("-----------------Dijkstra算法结果-----------------")
fmt.Println(S)
fmt.Println("-----------------最短路径:-----------------")
fmt.Printf("点%d到各个点的最短路长度是:\n", v)
for i:=0; i<len(S); i++ {
fmt.Printf("(%d, %d) = %d \n", v, S[i], D[S[i]][v])
}
}
程序测试运行结果:

3.Floyd算法理论
Floyd算法又称为插点法,是一种用于寻找给定的加权图中多源点之间最短路径的算法。该算法名称以创始人之一、1978年图灵奖获得者、斯坦福大学计算机科学系教授罗伯特·弗洛伊德命名。
通过一个图的权值矩阵求出它的每两点间的最短路径矩阵。从图的带权邻接矩阵A=[a(i,j)] n×n开始,递归地进行n次更新,即由矩阵D(0)=A,按一个公式,构造出矩阵D(1);又用同样地公式由D(1)构造出D(2);……;最后又用同样的公式由D(n-1)构造出矩阵D(n)。矩阵D(n)的i行j列元素便是i号顶点到j号顶点的最短路径长度,称D(n)为图的距离矩阵,同时还可引入一个后继节点矩阵path来记录两点间的最短路径。采用松弛技术(松弛操作),对在i和j之间的所有其他点进行一次松弛。所以时间复杂度为O(n^3)。
其核心思想是,通过三重嵌套循环,每次选取一个节点去作为中间过渡节点,判断其他任意两对节点间,如果通过所选取的节点来过渡,得到的路径长度较短,则更新该对节点之间的路径距离,即更新所对应的的距离矩阵的数值,这样最外层循环控制的是所选取的节点作为更新节点,内部嵌套的两个循环是作为遍历选取任意两个节点,来判断是否通过所选取的中间节点来过渡得到的距离更短,这样最外层循环,每一次进行下一步,距离举证将会得到更新,即Warshall方法中所对应的的矩阵更新变化。
优点:容易理解,可以算出任意两个节点之间的最短距离,代码编写简单。
缺点:时间复杂度比较高,不适合计算大量数据。
4.Floyd算法Go编程实现
func Floyd_Alg(D [LEN][LEN]int) {
//1. 创建对应的Path矩阵
//1.1 输出原邻接矩阵
fmt.Println("--------------------原来的邻接矩阵--------------------")
PrintMatrix(D[:])
//1.2 创建Path数组
var Path [LEN][LEN]int
for i:=0; i<LEN; i++ {
for j:=0; j<LEN; j++ {
Path[i][j] = -1
}
}
//2. 处理下原邻接矩阵的-1,不影响下面的判断
for i:=0; i<LEN; i++ {
for j:=0; j<LEN; j++ {
if D[i][j] == -1{
D[i][j] = 9999999
}
}
}
//3. 三层循环更新原邻接矩阵和Path矩阵
for v:=0; v<LEN; v++ {
for i:=0; i<LEN; i++ {
for j:=0; j<LEN; j++ {
//制造全排列
if i == j || v == j || v == i{
//三者不能相等,相等则跳过
continue
}
//fmt.Printf("V:%d, (%d, %d)\n", v, i, j)
//如果加上中间点,可以减小距离,那么就更新两个表
if D[i][j] > D[i][v] + D[v][j] {
D[i][j] = D[i][v] + D[v][j] //更新原邻接矩阵
Path[i][j] = v //更新Path路径图
}
}
}
}
//4. 输出邻接矩阵和没两个点之间的最短路径
fmt.Println("--------------------Floyd求得的最短距离邻接矩阵--------------------")
PrintMatrix(D[:])
fmt.Println("-----------------------------------------------------------------")
fmt.Println(D)
//输出每两个点的最短路径
for i:=0; i<LEN; i++ {
for j:=0; j<LEN; j++ {
if i == j {
continue
}
fmt.Printf("(%d, %d)点%d到点%d的最短路径是:", i, j, i, j)
PrintPathMatrix(Path[:], i, j)
fmt.Printf("\n")
}
}
}
运行结果截图:


5.最短路径算法总结
两种方法的时间复杂度都是N的三次方,均不适合大量数据的计算,比较的来看,Dijkstra算法和Floyd算法的思想都是“贪心”的思想,而Floyd算法的最短路径输出则是使用了递归的思想。Dijkstra算法每次只能求得单个点到其他点的最短路径,而Floyd算法则一次性可以求出每个点之间的最短路径,以上就是两个算法的异同。
参考资料
CSDN:
https://blog.csdn.net/heroacool/article/details/51014824
https://www.cnblogs.com/skywang12345/p/3711512.html
https://blog.csdn.net/wang_dong001/article/details/50196103