Ubuntu与stm32串口通信及Windows与stm32串口通信
Windows的串口通信老师学了就忘学了就忘
什么重定向printf什么中断接收函数什么配时钟树
难
做个记录
(写给自己看的
先完成windows与stm32通信:
点时钟树
HAL库 STM32CubeMX教程四—UART串口通信详解
跟着来就行
各种函数
1、串口发送/接收函数
- HAL_UART_Transmit();串口发送数据,使用超时管理机制
- HAL_UART_Receive();串口接收数据,使用超时管理机制
- HAL_UART_Transmit_IT();串口中断模式发送
- HAL_UART_Receive_IT();串口中断模式接收
- HAL_UART_Transmit_DMA();串口DMA模式发送
- HAL_UART_Transmit_DMA();串口DMA模式接收
经验之谈DMA不好用
在windows端实现串口通信方法:
在主函数声明一次
HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1);
串口中断接收函数,在收到中断后会进入HAL_UART_RxCpltCallback,并在此回调函数下利用HAL_UART_Transmit发送消息
(在串口助手上效果与printf的重定向一样)
但是在HAL_UART_RxCpltCallback这一函数的最后一行仍需再次声明HAL_UART_Receive_IT
(上面思路仍然搬运自Z小旋)
在main.c中加入以下定义
#include 在main()主函数中
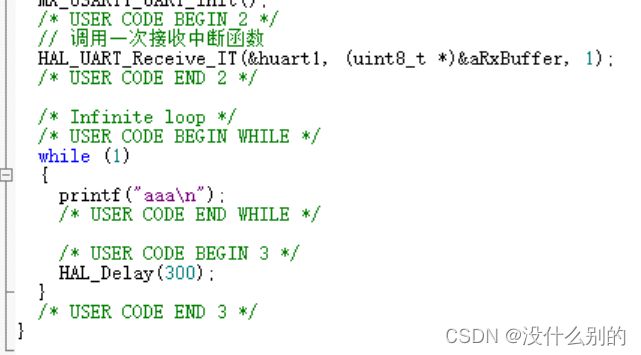
/* USER CODE BEGIN 2 */
HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1);
/* USER CODE END 2 */
在main.c下方加入以下回调函数
/* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(huart);
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_UART_TxCpltCallback could be implemented in the user file
*/
if(Uart1_Rx_Cnt >= 255) //溢出判断
{
Uart1_Rx_Cnt = 0;
memset(RxBuffer,0x00,sizeof(RxBuffer));
HAL_UART_Transmit(&huart1, (uint8_t *)"数据溢出", 10,0xFFFF);
}
else
{
RxBuffer[Uart1_Rx_Cnt++] = aRxBuffer; //接收数据转存
if((RxBuffer[Uart1_Rx_Cnt-1] == 0x0A)&&(RxBuffer[Uart1_Rx_Cnt-2] == 0x0D)) //判断结束位
{
HAL_UART_Transmit(&huart1, (uint8_t *)&RxBuffer, Uart1_Rx_Cnt,0xFFFF); //将收到的信息发送出去
while(HAL_UART_GetState(&huart1) == HAL_UART_STATE_BUSY_TX);//检测UART发送结束
Uart1_Rx_Cnt = 0;
memset(RxBuffer,0x00,sizeof(RxBuffer)); //清空数组
}
}
HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1); //再开启接收中断
}
/* USER CODE END 4 */
重定向printf
补充的代码如下:
part1:补充在代码上方
#include part2: 补充在程序最下面(其实哪里都行)
/**
* 函数功能: 重定向c库函数printf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/**
* 函数功能: 重定向c库函数getchar,scanf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}
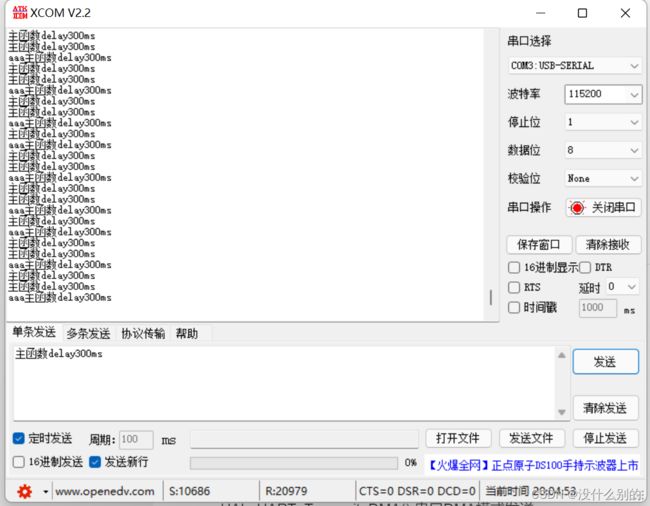
结果如图
Ubuntu与串口通信
参考文档
亲测可用,但是每次串口连接都需要找到对应串口
sudo chmod 777 /dev/ttyUSB0
切记切记!
查看串口设置
Linux设备插上TTL转USB模块后,打开一个终端,输入下面命令,回车
ll /dev
若能找到类似下图,说明串口设备已经被识别
crw-rw---- 1 root dialout 188, 0 Aug 3 21:46 /dev/ttyUSB0
设置值串口权限
在终端输入
sudo chmod 777 /dev/ttyUSB0 #按照自己的设备名字对ttyUSB0进行更改
如果没有返回任何字符,说明串口设备权限设置成功,但是这个方法,在每次使用串口设备前都要进行这样的操作.
ROS端参考代码:
核心代码片段
//串口相关对象
boost::asio::io_service iosev;
boost::asio::serial_port sp(iosev, "/dev/ttyUSB0");
boost::system::error_code err;
/********************************************************
函数功能:串口参数初始化
入口参数:无
出口参数:
********************************************************/
void serialInit()
{
sp.set_option(serial_port::baud_rate(115200));
sp.set_option(serial_port::flow_control(serial_port::flow_control::none));
sp.set_option(serial_port::parity(serial_port::parity::none));
sp.set_option(serial_port::stop_bits(serial_port::stop_bits::one));
sp.set_option(serial_port::character_size(8));
}
/********************************************************
函数功能:将对机器人的左右轮子控制速度,打包发送给下位机
入口参数:机器人线速度、角速度
出口参数:
********************************************************/
void writeSpeed(double Left_v, double Right_v,unsigned char ctrlFlag)
{
unsigned char buf[11] = {0};//
// 设置消息头
for(i = 0; i < 2; i++)
buf[i] = header[i]; //buf[0] buf[1]
.......
// 通过串口下发数据
boost::asio::write(sp, boost::asio::buffer(buf));
}
/********************************************************
函数功能:从下位机读取数据
入口参数:机器人左轮轮速、右轮轮速、角度,预留控制位
出口参数:bool
********************************************************/
bool readSpeed(double &Left_v,double &Right_v,double &Angle,unsigned char &ctrlFlag)
{
char i, length = 0;
unsigned char checkSum;
unsigned char buf[150]={0};
//=========================================================
//此段代码可以读数据的结尾,进而来进行读取数据的头部
try
{
boost::asio::streambuf response;
boost::asio::read_until(sp, response, "\r\n",err);
copy(istream_iterator<unsigned char>(istream(&response)>>noskipws),
istream_iterator<unsigned char>(),
buf);
}
catch(boost::system::system_error &err)
{
ROS_INFO("read_until error");
}
//=========================================================
// 检查信息头
if (buf[0]!= header[0] || buf[1] != header[1]) //buf[0] buf[1]
{
ROS_ERROR("Received message header error!");
return false;
}
// 数据长度
length = buf[2]; //buf[2]
// 检查信息校验值
checkSum = getCrc8(buf, 3 + length); //buf[10] 计算得出
if (checkSum != buf[3 + length]) //buf[10] 串口接收
{
ROS_ERROR("Received data check sum error!");
return false;
}
// 读取速度值
for(i = 0; i < 2; i++)
{
leftVelNow.data[i] = buf[i + 3]; //buf[3] buf[4]
rightVelNow.data[i] = buf[i + 5]; //buf[5] buf[6]
angleNow.data[i] = buf[i + 7]; //buf[7] buf[8]
}
// 读取控制标志位
ctrlFlag = buf[9];
Left_v =leftVelNow.d;
Right_v =rightVelNow.d;
Angle =angleNow.d;
return true;
}
boost::asio::write // 通过串口下发指令