从零开始的STM32F1课程学习(STM32CubeMX)
新学期新气象,新学期我们要学32了,之前虽然学了一点点,但是学的都不是很系统,这里终于能系统的学习一下32了,从原理角度进行一下学习。
文章目录
-
- 我的基本配置:STM32CubeMX、Jlink、STM32F103RCT6 MINI
- 第一节课
-
- 第一节课课后练习:点灯
-
- 1.配置好Cube的Project Manager
- 2.时钟树设置
- 3.RCC设置
- 4.Debug模式设置
- 5.LED0引脚设置
- 6.生成代码
- 7.在主函数while中写出灯的亮灭
- 8.配置Jlink
- 9.检测芯片
- 10.编译后下载
- 第二节课
-
- 第二节课课后练习:按键控制灯的亮灭
-
- 1.配置好基础配置,和上面前4步一样
- 2.启用按键和LED的引脚
- 3.配置好GPIO
- 4.在while中写出按键检测
- 5.编译后下载成功
- 第三节课
-
- 第三节课课后练习:外部中断控制灯
-
- 1.配置好基础配置,和第一节课4步一样
- 2.配置按键的GPIO模式
- 3.在主函数中让程序执行LED0的亮灭
- 4. 在stm32f1xx_hal_gpio.c中找到中断回调函数
- 5.编译后成功下载
- 第四节课
-
- 第四节课课后练习:在while(1)中执行灯的同步闪烁,按下KEY0按键,灯闪烁加快20次,按下WKUP,灯交替闪烁20次,KEY0的优先级更高
-
- 1.配置好基础配置
- 2.配置按键的GPIO
- 3.在NVIC中配置中断优先级
- 4.配置两个灯为推挽输出
- 5.在while(1)中写出同步闪烁
- 6.在stm32f10x_hal_gpio.c中写中断回调函数
- 7.编译成功后下载
- 第五节课
-
- 第五节课课后练习:定时器实现灯的500ms间隔闪烁,和另一个灯的700ms闪烁
-
- 1.配置好基础配置
- 2.打开TIM2和TIM3
- 3.在NVIC中设置优先级
- 4.设置灯为推挽输出
- 5.打开定时器中断
- 6.编译后成功下载
- 第六节课
-
- 第六节课课后练习:通过两个按键利用PWM控制灯的亮灭
-
- 1.配置好基础配置
- 2.打开TIM1_CH1
- 2.在NVIC中打开中断
- 3.设置两个按键的GPIO
- 4.写出按键检测代码和启动PWM
- 5.编译后下载
- 第七节课
-
- 第七节课课后作业:串口的收发回显测试
-
- 1.配置好基础配置
- 2.打开串口
- 3.在main.c中添加fputc fgetc
- 4.主函数代码
- 5.编译下载
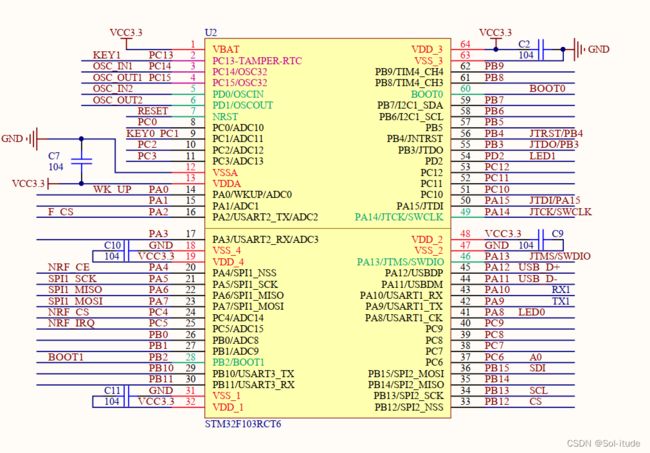
我的基本配置:STM32CubeMX、Jlink、STM32F103RCT6 MINI
STM32MINI就是我们学校上课用的32
第一节课
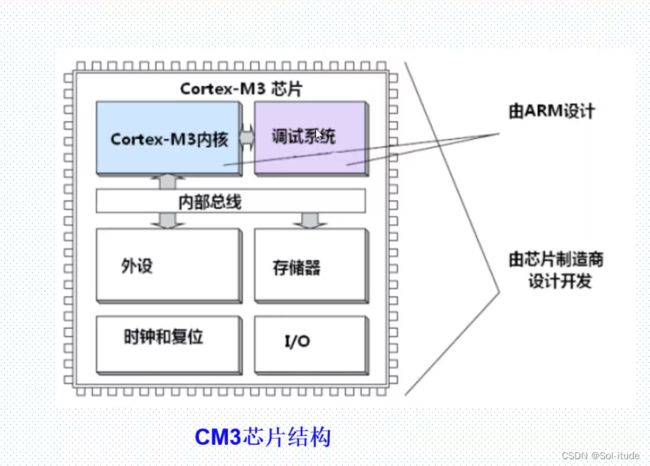
嵌入式就是在单片机上跑操作系统
STM32芯片内部
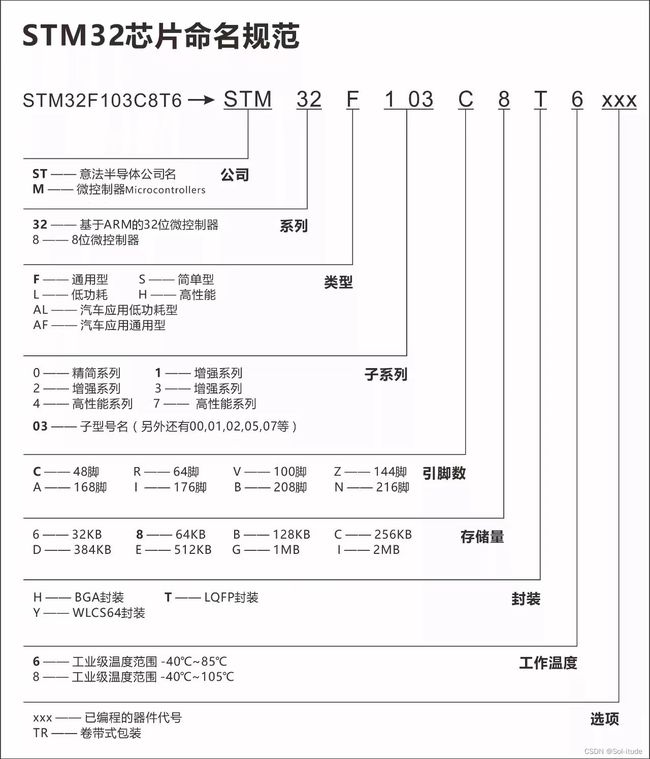
这是STM32的命名规则
时钟最高72M
PIN to PIN兼容是指两款芯片的引脚数目一样,功能一样,大小也一样


通过修改BOOT0和BOOT1的方式来修改32的启动方式,利用跳线帽改这个

将2,4等引脚短接来修改其启动方式

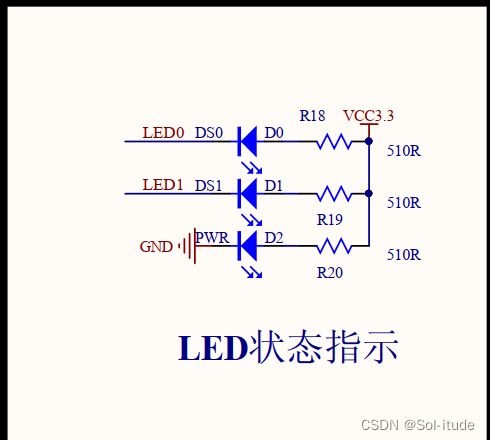
第一节课课后练习:点灯
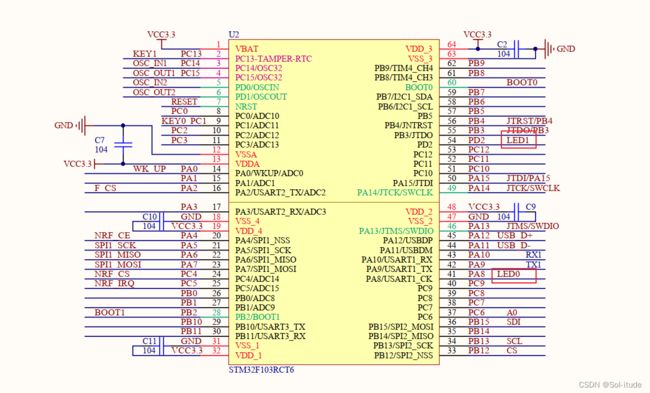
灯的连线
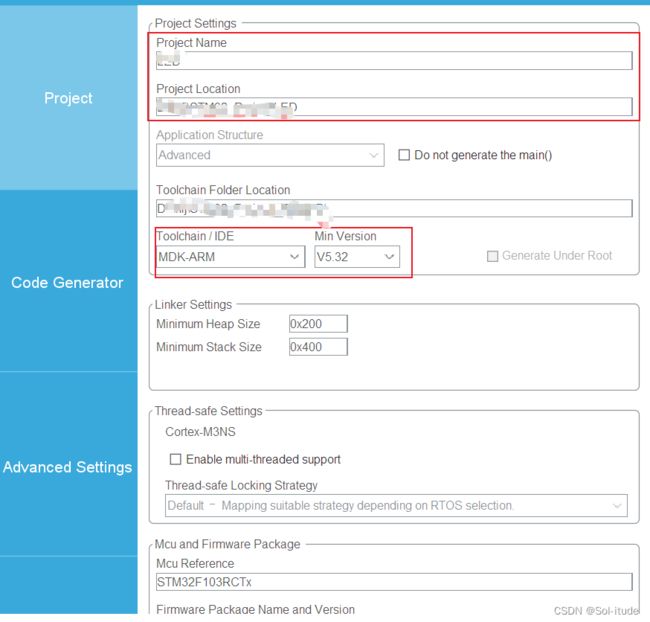
1.配置好Cube的Project Manager
路径和工程名称设置
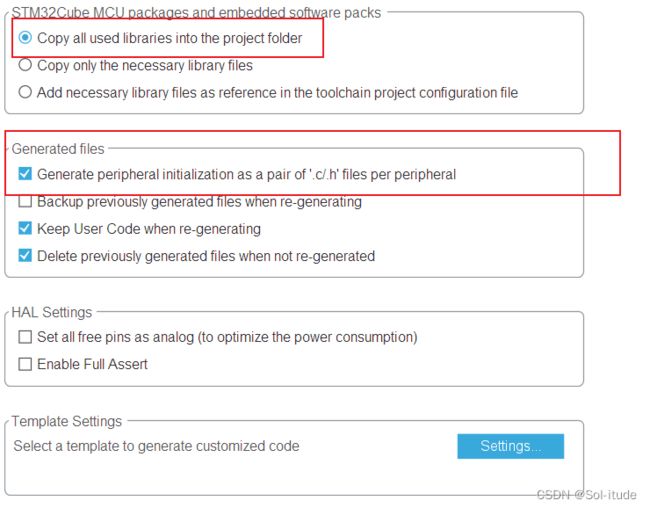
Code Generator设置
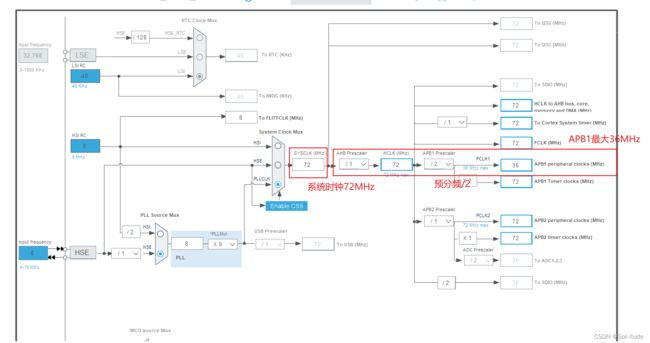
2.时钟树设置
都改成最高的

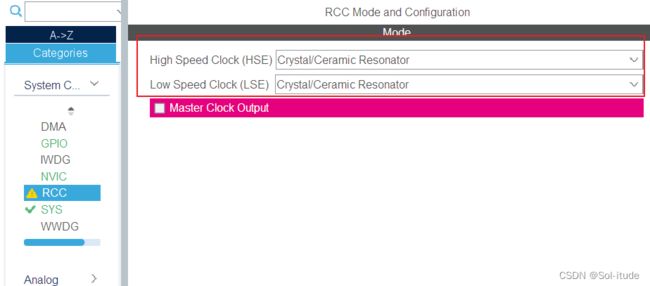
3.RCC设置
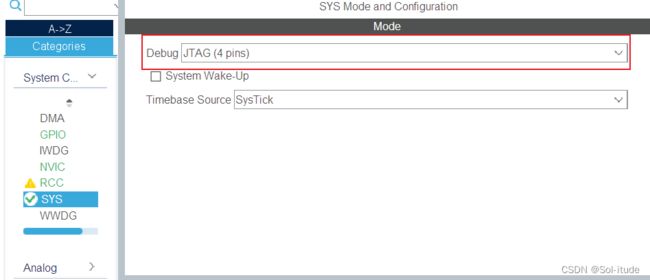
4.Debug模式设置
5.LED0引脚设置
设置为GPIO_Output

6.生成代码

void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_RESET);
/*Configure GPIO pin : PA8 */
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
下面是标准库的配置
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitTypeStrucre;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeStrucre.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitTypeStrucre.GPIO_Pin=GPIO_Pin_8 ;
GPIO_InitTypeStrucre.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitTypeStrucre);
GPIO_SetBits(GPIOA,GPIO_Pin_8 );
}
7.在主函数while中写出灯的亮灭
HAL_Delay(1)实际延时时间多于1ms一点
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_Delay(300);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_RESET);
HAL_Delay(300);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_SET);
8.配置Jlink

9.检测芯片
注意:要先给芯片上电,再连接Jlink

10.编译后下载
![]()
第二节课
什么是看门狗?
是一个定时器,将里面的数值加到一定数值之后,会被复位
所以在程序中每隔多少秒要把看门狗复位
看门狗主要用于无人看管的程序,防止程序跑飞了
GPIO:General Purpose Input Output,通用输入输出
输出三种:1.推挽2.开漏3.关闭

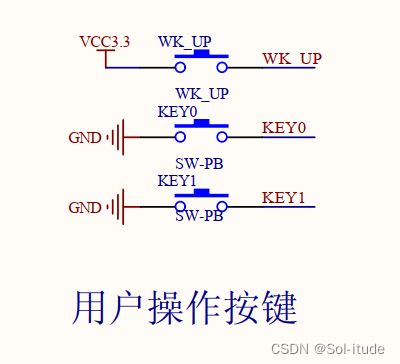
第二节课课后练习:按键控制灯的亮灭
1.配置好基础配置,和上面前4步一样
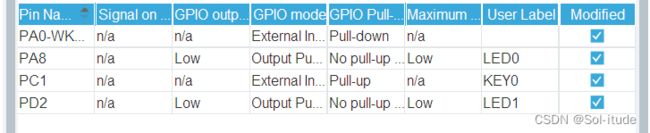
2.启用按键和LED的引脚

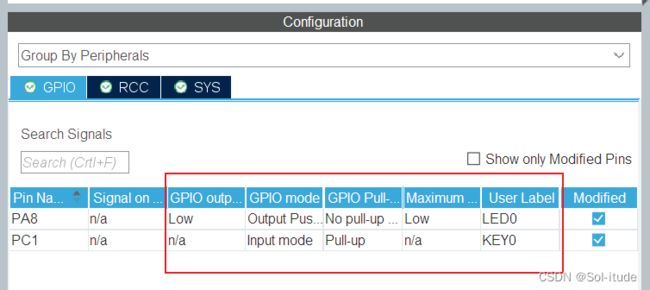
3.配置好GPIO
KEY0采用上拉模式和输入模式
我一般习惯把名字起的和原理图一模一样,这样代码读起来方便
4.在while中写出按键检测
while (1)
{
if(HAL_GPIO_ReadPin(KEY0_GPIO_Port, KEY0_Pin)==GPIO_PIN_RESET)
{
HAL_Delay(10);
if(HAL_GPIO_ReadPin(KEY0_GPIO_Port, KEY0_Pin)==GPIO_PIN_RESET)
{
HAL_GPIO_TogglePin(LED0_GPIO_Port,LED0_Pin);
while(HAL_GPIO_ReadPin(KEY0_GPIO_Port, KEY0_Pin)==GPIO_PIN_RESET);
}
}
/* USER CODE END WHILE */
}
5.编译后下载成功
下载后要先按一下Reset才能成功执行
第三节课
第三节课课后练习:外部中断控制灯
1.配置好基础配置,和第一节课4步一样
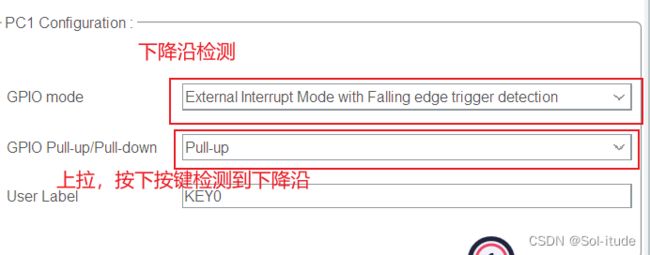
2.配置按键的GPIO模式

3.在主函数中让程序执行LED0的亮灭
让LED0闪烁,LED1灭
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_Delay(300);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_RESET);
HAL_Delay(300);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
}
4. 在stm32f1xx_hal_gpio.c中找到中断回调函数
如果按下按键,则LED1亮,表示进入外部中断
__weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(GPIO_Pin);
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_GPIO_EXTI_Callback could be implemented in the user file
*/
if(GPIO_Pin==GPIO_PIN_1)
{
if(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_1)==0)
{
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_1);
}
}
5.编译后成功下载
第四节课
第四节课系统学习了外部中断
第四节课课后练习:在while(1)中执行灯的同步闪烁,按下KEY0按键,灯闪烁加快20次,按下WKUP,灯交替闪烁20次,KEY0的优先级更高
1.配置好基础配置
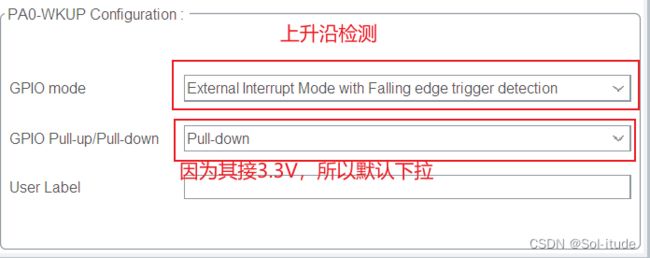
2.配置按键的GPIO
在CUBE中都设置为GPIO_EXTI模式
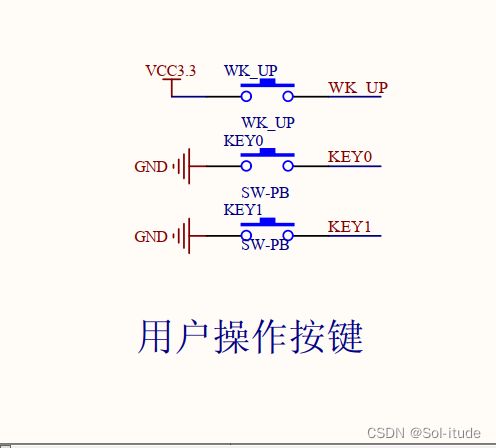
因为KEY0接地,我们配置成上拉模式
同理,配置WKUP
3.在NVIC中配置中断优先级
数字越小,优先级越高

4.配置两个灯为推挽输出
5.在while(1)中写出同步闪烁
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
delay_ms(500);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
delay_ms(500);
}
/* USER CODE END 3 */
delay_ms
//毫秒延时
void delay_ms(uint16_t nms)
{
uint32_t temp;
SysTick->LOAD = 9000*nms;
SysTick->VAL=0X00;//清空计数器
SysTick->CTRL=0X01;//使能,减到零是无动作,采用外部时钟源
do
{
temp=SysTick->CTRL;//读取当前倒计数值
}while((temp&0x01)&&(!(temp&(1<<16))));//等待时间到达
SysTick->CTRL=0x00; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
6.在stm32f10x_hal_gpio.c中写中断回调函数
__weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(GPIO_Pin);
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_GPIO_EXTI_Callback could be implemented in the user file
*/
if(GPIO_Pin==GPIO_PIN_1)
{
if(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_1)==0)
{
for(int i=0;i<20;i++)
{
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_8,GPIO_PIN_RESET);
delay_ms(200);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_8,GPIO_PIN_SET);
delay_ms(200);
}
}
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_1);
}
if(GPIO_Pin==GPIO_PIN_0)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==0)
{
for(int i=0;i<20;i++)
{
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_8,GPIO_PIN_SET);
delay_ms(200);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_8,GPIO_PIN_RESET);
delay_ms(200);
}
}
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_0);
}
}
7.编译成功后下载
在这个作业中不要将按键设置成浮空,浮空状态会有点问题,要根据引脚设置成需要的状态
第五节课
- 高级定时器 TIM1 TIM8 在APB1上
- 通用定时器 TIM2 TIM3 TIM4 TIM5 在APB2上
- 基本定时器 TIM6 TIM7 在APB1上
周期表
p n u m 1 K M G T
更新事件Update event(UE)
可以把CNT清零

定时器时间t=1/Tout
如果使能影子寄存器,影子寄存器会在更新事件发生时,将内部数值更新到ARR
ARR是计算时间间隔所以要加1
因为PSC不能为0,所以要加上1

第五节课课后练习:定时器实现灯的500ms间隔闪烁,和另一个灯的700ms闪烁
1.配置好基础配置
2.打开TIM2和TIM3

arr和psc的计算过程
(4999+1)*(7199+1)=36000000
72000000/36000000=2
1/2=0.5s=500ms

3.在NVIC中设置优先级

4.设置灯为推挽输出

5.打开定时器中断
main.c
/* USER CODE BEGIN PV */
static int i=0;
/* USER CODE END PV */
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim2);
HAL_TIM_Base_Start_IT(&htim3);
/* USER CODE END 2 */
在stm32f10x_hal_tim.c中找到中断回调函数,在main.c中重定义
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==&htim2)
{
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_8);//对GPIO口的电平进行反转(低-高,高—低)
}
if(htim==&htim3)
{
if(++i>=700)
{
i=0;
HAL_GPIO_TogglePin(GPIOD,GPIO_PIN_2);//对GPIO口的电平进行反转(低-高,高—低)
}
}
6.编译后成功下载
第六节课
第六节课课后练习:通过两个按键利用PWM控制灯的亮灭
1.配置好基础配置
2.打开TIM1_CH1

2.在NVIC中打开中断

3.设置两个按键的GPIO

4.写出按键检测代码和启动PWM
/* USER CODE BEGIN 1 */
int i=500;
/* USER CODE END 1 */
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1); // 使能PWM输出
/* USER CODE END 2 */
/* USER CODE BEGIN 3 */
if(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_1)==GPIO_PIN_RESET)
{
HAL_Delay(10);
if(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_1)==GPIO_PIN_RESET)
{
i=i+1;
htim1.Instance->CCR1 = i;
HAL_Delay(1);
while(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_1)==GPIO_PIN_RESET);
}
}
if(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_13)==GPIO_PIN_RESET)
{
HAL_Delay(10);
if(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_13)==GPIO_PIN_RESET)
{
i=i-1;
htim1.Instance->CCR1 = i;
HAL_Delay(1);
while(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_13)==GPIO_PIN_RESET);
}
}
}
/* USER CODE END 3 */
5.编译后下载
第七节课
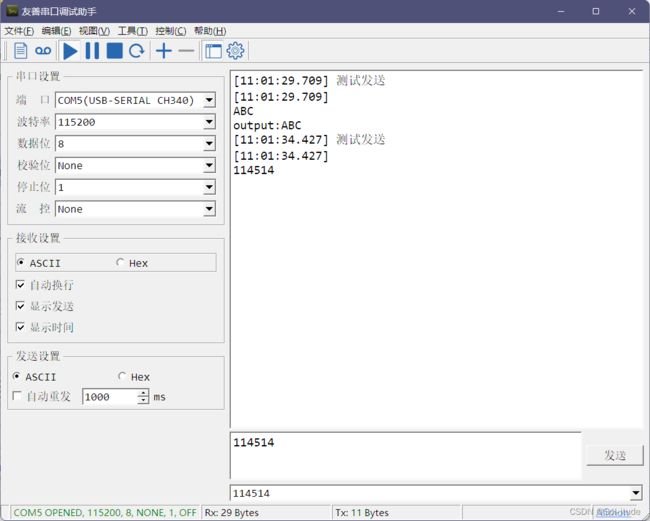
第七节课课后作业:串口的收发回显测试
1.配置好基础配置
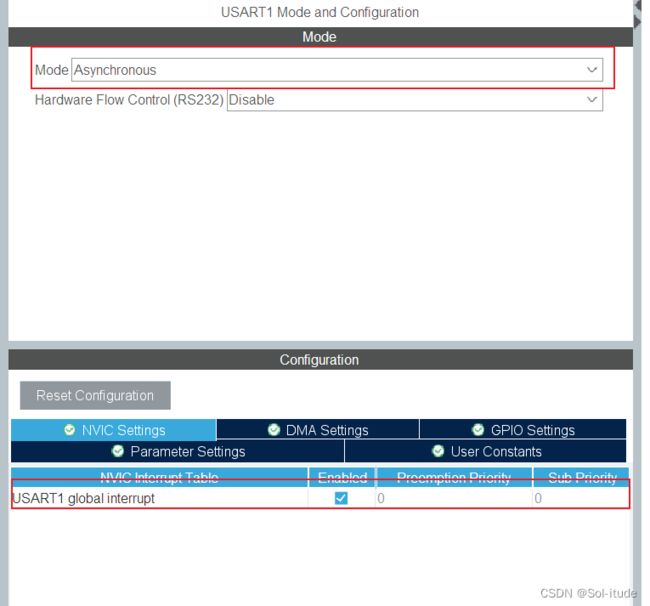
2.打开串口
设置异步模式和打开中断
3.在main.c中添加fputc fgetc
/**
* 函数功能: 重定向c库函数printf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/**
* 函数功能: 重定向c库函数getchar,scanf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}
4.主函数代码
定义了一个字符串
/* USER CODE BEGIN 1 */
char str[10];
/* USER CODE END 1 */
因为scanf在单片机中并不是阻塞式接收,所以我们要将其改为阻塞式的
/* USER CODE BEGIN 3 */
printf("测试发送\n");
HAL_Delay(100);
str[0]=0;
while(str[0] == 0)
{
scanf("%s",str);
}//使其变成手动的阻塞式接收
HAL_Delay(1000);
printf("output:%s\n",str);
5.编译下载
可以发送也可以接收