数据结构与算法——深度寻路算法

作者介绍:22级树莓人(计算机专业),热爱编程<目前在c++阶段,因为最近参加新星计划算法赛道(白佬),所以加快了脚步,果然急迫感会增加动力>——目标Windows,MySQL,Qt,数据结构与算法,Linux,多线程,会持续分享学习成果和小项目的
作者主页:king&南星
专栏链接:数据结构欢迎各位→点赞 + 收藏 + 留言
总结:希望你看完之后,能对你有所帮助,不足请指正!共同学习交流

文章目录
-
-
- 1、介绍
- 2、地图的描绘
- 3、试探方向
- 4、死胡同问题
- 5、Stack代码
-
- .h文件
- .c文件
- 6、算法代码
-
- .h文件
- .c文件
-
1、介绍
深度寻路算法:使用的是栈模板,通过将其走过的点的坐标压入栈中,然后遍历其所在位置的各个方向寻找可以通行的"路径",一般情况下当迷宫的范围不太大时,其又存在路径是可以遍历到路径的,但是深度寻路并不会寻找最短路径。 并且 当迷宫足够大时,且其可通行的点足够多时,也就是一直都有点压入栈中,这时是找不到迷宫的出口的,还会使栈的占用内存过大,导致栈溢出。 深度优先搜索的规则是沿着一个固定的方向进行行走,等到了一个岔路口再继续选择方向,如果碰上了死胡同再退回下一个岔路口重新选择方向。 走过的路不会重新走,一次只走一个岔路口。深度寻路只能走直线 不能走斜线
2、地图的描绘
用二维数组来描述,可以用其他数据结构来描述 图结构
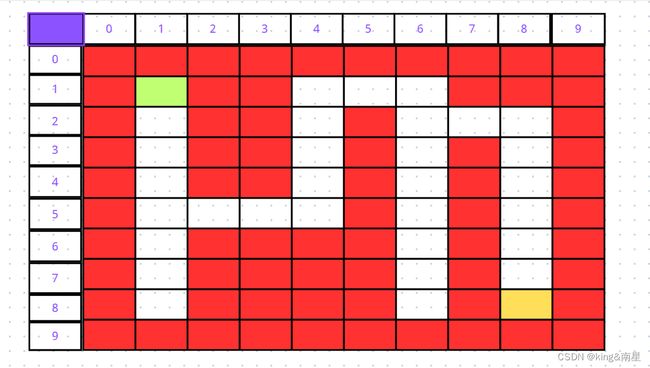
//地图 1表示障碍 0表示路
int map[ROWS][COLS] = {
{ 1, 1, 1, 1, 1, 1, 1, 1, 1, 1 },
{ 1, 0, 1, 1, 0, 0, 0, 1, 1, 1 },
{ 1, 0, 1, 1, 0, 1, 0, 0, 0, 1 },
{ 1, 0, 1, 1, 0, 1, 0, 1, 0, 1 },
{ 1, 0, 1, 1, 0, 1, 0, 1, 0, 1 },
{ 1, 0, 0, 0, 0, 1, 0, 1, 0, 1 },
{ 1, 0, 1, 1, 1, 1, 0, 1, 0, 1 },
{ 1, 0, 1, 1, 1, 1, 0, 1, 0, 1 },
{ 1, 0, 1, 1, 1, 1, 0, 1, 0, 1 },
{ 1, 1, 1, 1, 1, 1, 1, 1, 1, 1 },
};
3、试探方向
试探 一般是顺时针或者逆时针
好马不吃回头草
人为规定试探方向顺序并且一开始所有的点都是一样
例如:一开始每个点都是 上
试探顺序是 上 左 下 右 逆时针
已经走过的应当标记,试探的时候走过的不走所以我在这里准备了预测点和辅助地图,预测点的作用是探测是墙还是路,能不能走;辅助地图的作用是标记已经走过的地方和方向
//点
Mypoint begPos = { 1,1 };
Mypoint endPos = { 8,8 };
//辅助地图,标记起点走过
pathMap PathMap[ROWS][COLS] = { 0 };
PathMap[begPos.row][begPos.row].isFind = true;
//栈 起点入栈
Stack stack;
init(&stack);
push(&stack, &begPos);
//标记没有找到终点
bool isFindEnd = false;
//当前点
Mypoint currentPos;
currentPos.row = begPos.row;
currentPos.col = begPos.col;
//预测点
Mypoint searchPos;
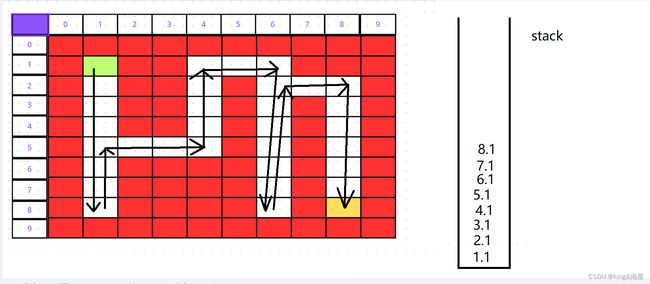
4、死胡同问题
回退机制
栈结构:先入后出,后入先出
1 走过就入栈
2 遇到死胡同(每个方向都试过还不能走 最后一个方向右都不能走)回退
2.1 pop 出栈一个
2.2 跳到当前栈顶元素处
例如下图,当走到8,1的时候遇到死胡同,这里只需要把栈顶元素删掉,然后跳到当前栈顶元素
5、Stack代码
.h文件
#ifndef _MY_STACK_H_
#define _MY_STACK_H_
#include"Mytypes.h"
#include.c文件
#include "MyStack.h"
#include6、算法代码
.h文件
#ifndef _MY_TYPES_H_
#define _MY_TYPES_H_
#include.c文件
#include"Mytypes.h"
#include"MyStack.h"
#include