三万字全面概述关于5G-V2X技术和应用
5G技术有望实现更快的网联链接、更低的延迟、更高的可靠性、更大的容量和更广的覆盖范围。希望依靠这些技术来实现车辆到一切(V2X)的通信,除了道路安全外,还能提高车辆的安全性和自动驾驶性能,节约能源和成本。车辆通信系统和5G的整合是许多研究的主题。现在,研究人员解决的挑战包括自动和智能网络、云和边缘数据处理、网络管理、虚拟化、安全、隐私以及最后的互操作性。本文对最新的V2X用例进行了调查,包括要求,以及正在考虑的各种5G使能技术的车辆通信。随后,首先提供了5G三大支柱和V2X用例组之间的映射关系。然后,总结了V2X用例组的启用技术的潜在应用。最后,讨论了开放的研究方向,并指出了有待应对的挑战。
C-RAN Cloud/Centralized Radio Access Network
CAM Cooperative Awareness Message
CAPEX CAPital EXpenses
CEPT European Conference of Postal and Telecommunications Administrations
CLC Cooperative Lane Change
CoCA
Cooperative Collision Avoidance
DENM Decentralized Environmental Notification Message
ECUElectronic Control Unit
eMBB enhanced Mobile Broadband
EtrA Emergency Trajectory Alignment
ETSI European Telecommunications Standards Institute
FD Full-Duplex
ITS Intelligent Transport Systems
IVC Inter-Vehicle Communications
KPI Key Performance Indicator
LDM Local Dynamic Map
LoA Level of Automation
MANET Mobile Ad Hoc Network
MEC Mobile (or Multi-access) Edge Computing
mMTC massive Machine Type Communications
mmWave Millimeter Wave
MNO Mobile Network Operator
MR-DC Multi-Radio Dual Connectivity
NFV Network Function Virtualization
NOMA Non-Orthogonal Multiple Access
NR New Radio, 5G radio access technology
OPEX OPErating EXpenses
PLMN Public Land Mobile Network
SDN Software Defined Networking
TTA Telecommunications Technology Association
UE User Equipment
URLLC Ultra-Reliable and Low-Latency Communications
V2I Vehicle-to-Infrastructure
V2N Vehicle-to-Network
V2P Vehicle-to-Pedestrian
V2V Vehicle-to-Vehicle
V2X Vehicle-to-Everything
VANET Vehicular Ad Hoc Network
如今,无线通信的进步允许通过实时的车辆对行人(V2P)、车辆对车辆(V2V)、车辆对基础设施(V2I)和通过蜂窝网络(V2N)通信来共享信息。V2X通信用例主要可分为安全、非安全和信息娱乐服务。安全服务旨在尽量减少事故和对乘客和道路使用者的风险。非安全服务被智能交通系统(ITS)用来改善交通管理,以最大限度地提高现有道路网络的效率,并尽量减少交通的不利影响,如拥堵及其对经济生产力和环境质量的后续影响[1], [2]。信息娱乐服务为汽车用户提供一系列服务,包括访问互联网、舒适服务、视频流和内容共享。
车载网络和ITS是相互联系的,并且是平行发展的。例如,由于5G有望在车辆通信中发挥突出作用[3],欧盟委员会推动的合作-ITS(C-ITS)参考架构将得到改进,以满足5G技术及以后的要求[4],[5]。
V2X通信主要由两种主要的无线电接入技术(RATs)实现,一种是基于Wi-Fi(IEEE 802.11p),另一种是基于蜂窝(C-V2X)。每种RAT都有其优点和缺点,这也是许多研究论文的主题[6],[7],[8], [9]。在本文这项概述研究中,专注于C-V2X,更具体地说,是Rel.16中的新无线电(NR)V2X。
5G是基于三个主要的支柱。1)增强型移动宽带(eMBB),2)大规模机器类型通信(mMTC),以及3)超可靠和低延迟通信(URLLC)。启用URLLC是先进的V2X应用的一个基石。然而,eMBB和mMTC在车辆通信中也发挥着重要作用。在无线电层面,5G利用三个主要策略:利用更多的频谱资源,重新使用资源,以及提高频谱效率。例如,全双工(FD)在提高频谱密度、动态频谱分配的灵活性和可靠性,以及实现同步传输/接收方面发挥作用。
上述策略在5G网络层面上与许多使能技术和算法进一步结合。例如,通过软件定义网络(SDN)、自适应算法和优化策略,可以提高网络性能和监控。作为SDN的补充,网络功能虚拟化(NFV)增加了网络功能的灵活性并降低了成本。此外,还可以利用人工智能提高网络自动化程度。通过边缘计算,提高了处理数据和增强延迟的能力,而网络切片可以将一个物理网络划分为多个虚拟网络,从而实现网络资源的开发和不同应用的服务。
本文研究的目的是研究标准化机构/产业联盟的技术报告中提出的V2X用例与5G启用文献之间的互动。为了显示这项调查的附加值以及它在最近与车辆通信有关的调查中的地位,将介绍这些调查的摘要。此外,在本节末尾还增加了一个总结这些调查的贡献的表格(见表1)。
表1 在最近的类似调查中,本工作在拟议内容的背景下的定位:
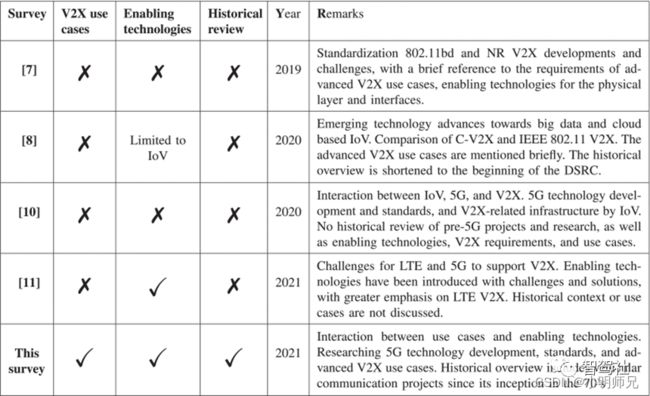
在[7]中,作者调查了802.11bd和NR V2X标准化的最新发展。他们指出802.11p和C-V2X(LTE)都需要演进,并讨论了频谱管理问题。然而,[7]没有讨论应用技术、高级V2X用例和促使RAT发展的要求。此外,没有提供使车辆通信发展到这一阶段的过去工作的历史概述。
研究报告[8]在新兴技术向车联网(IoV)演进的背景下,特别是大数据驱动和基于云的IoV,提供了一个更全面的研究。它提出了从DSRC发布开始的V2X演变的历史过程的观点。然而,与之前的调查一样,该工作[9]提出了C-V2X和IEEE 802.11 V2X通信之间的比较,但没有涵盖高级V2X用例。
[10]中的研究侧重于物联网、5G和V2X之间的互动。作者介绍了关于5G技术及其标准的演变、与V2X相关的基础设施、V2X的特点和协议以及V2X的可能应用的文献回顾。然而,该研究缺乏对5G之前的项目和研究的历史回顾,以及对启用技术、V2X要求和用例之间的映射。
最后,最近的一项研究[11]回顾了当前支持V2X通信的LTE和5G的工作和挑战。该研究提出了几个具有挑战和解决方案的使能技术、LTE V2X架构和操作场景,此外还讨论了基于5G的车辆通信的开放式研究问题和趋势。然而,这项工作很少关注历史背景和以前的研究,也没有讨论V2X用例和5G中潜在使能技术之间的联系。表1列出了与本研究相比,以前的研究的贡献摘要。考虑到V2X用例和使能技术的研究,以及历史回顾和过去的项目。
在本文中,对应用于车辆通信的5G使能技术进行了广泛研究。此外,还介绍了V2X用例组,以形成对挑战和要求的更广泛理解。本文的主要贡献列举如下:
介绍了V2X用例组以及它们的要求。为此,我们依靠规范性组织和文献的最新出版物。
说明了支持车辆通信的5G架构和相关的新兴技术,以及对该领域的科学研究和已发表内容的总结。
基于对潜在的V2X通信需求和当前标准及文献的分析,讨论了一些开放的研究方向,并指出了一些需要解决的主要挑战。
本文的其余部分组织如下。在第二节中,提供了车辆通信的历史回顾。在第三节中,介绍了V2X通信类型和用例。在第四节中,详细介绍了包括5G V2X通信在内的车辆通信的发展。在第五节中,对研究的开放方向提出了建议。最后,在第六节中得出结论。
5G-V2X的出现是以前实现车辆通信的努力的延伸。通过项目和研究的不断发展,使V2X开始探索使用5G技术。在这一节中,提供了一个关于车辆通信的开端及其发展阶段的历史概述。这一回顾包括最重要的项目、活动、里程碑、技术和标准的顺序。车辆网络历史上的大多数里程碑都源自于美国、欧洲和日本。因此,对这些地区的活动和项目给予了特别关注。这篇评论概述了车辆通信的发展路径,以达到基于5G的V2X,并随着时间的推移确定更先进的用例。
可以追溯到20世纪70年代,以提高安全性、减少事故和帮助驾驶员为目的的车辆间通信项目的工作历史,如美国的电子路线指导系统(ERGS)和日本的CACS[12]。车辆间通信(IVC)研究的开端可以追溯到20世纪80年代初[13],一般是指司机或车辆之间的通信。使用了诸如红外线和无线电波(VHF、微波、毫米波)等媒介,以及基于ALOHA和CSMA的协议。PROMETHEUS是欧洲最早的IVC项目之一[14]。而在美国,则是以1986年的PATH项目和1994年的国家自动公路系统联盟(NAHSC)项目开始的。后来,许多项目(如ASV 1和2、CHAUFFEUR I和II、FleetNet、CarTALK 2000、TELCO、IVI [12])在世界各地实施。图1提供了历史上IVC项目的概要。
图1. 开拓性车辆通信活动、里程碑、使能技术和标准概述
Vehicular Ad Hoc网络(VANET)一词是在21世纪初引入的,是移动Ad Hoc网络(MANET)原理在车辆领域的应用[12]。VANET和IVC这两个术语没有区别,可以互换使用,指的是车辆之间的通信,无论是否依赖路边的基础设施,尽管有些人认为IVC仅指V2V直接通信[15]。在此期间,许多项目在欧盟、日本、美国和世界其他地区得到资助(例如,ASV 3、4和5、SAFESPOT、PReVENT、COMeSafety、NoW、IVI)[12], [15]。
正如所注意到的,作为一个开始,多种媒体被用作车辆通信的基础,如激光、红外和各种无线电波(蓝牙、IEEE 802.11、GSM、GPS、GPRS、3G)[12], [15]。此外,许多首字母缩写词被用来指代车辆通信,它们在历史背景、使用的技术、标准,有时甚至取决于国家(车辆远程信息处理、DSRC、WAVE、VANET、IoV、802.11p、ITS-G5、V2X)方面各不相同。目前,蜂窝(基于3GPP-Release 16)和WiFi(基于IEEE 802.11p)已被证明是实现互联车辆的潜在通信技术。然而,这并不否定所有以前的技术或其他技术(如VLC、ZigBee、WiMAX、微波、毫米波)仍然是一个车辆通信研究领域。更进一步说,当每辆连接到互联网的车辆被视为一个节点时,这使得物联网(IoT)在车辆中可用,或被称为IoV(车联网)。IoV是最活跃的研究领域之一,它包含了车辆网络和物联网的结合[15]。
车辆通信领域的工作可以分为研究和工业工作,以及监管和标准方面的工作。一些组织和政府机构关注发布车辆通信的标准和规范(ASTM、IEEE、ETSI、SAE、3GPP、ARIB、TTC、TTA、CCSA、ITU、5GAA、5G PPP、ITS美国、ERTICO、ITS亚太)。3GPP正在制定基于蜂窝的V2X通信的标准和规范,而IEEE正在通过下一代V2X(NGV)研究小组进行802.11bd标准的发布工作。
另一方面,一些政府机构与汽车制造商、供应商、顾问和学术机构合作,正在努力促进研究项目。在美国,交通部(USDOT)并通过国家公路交通安全管理局(NHTSA)和联邦公路管理局(FHWA)与避免碰撞指标伙伴(CAMP)合作开展了几个研究项目(例如。信号化走廊交通优化(TOSCo),合作自动驾驶系统(CADS),车辆到基础设施安全应用(V2I-SA),车辆到车辆通信研究第二阶段(V2V-CR2),车辆到车辆系统工程(V2V-SE))。在美国交通部的支持下,为了加速ITS的部署,许多其他的倡议正在制定中,如开放源码工具(CARMASM)、标准、ITS数据和开放源码以及技术文件等[17]。
在欧洲,欧盟通过其计划(框架计划FP1至FP8)资助了许多V2X项目(例如,5G-DRIVE、MARSS-5G、C-ROADS、CODECS、MAVEN)。一个名为阿姆斯特丹集团的联盟,包括CEDR、ASECAP、POLIS和C2C-CC,旨在促进在欧洲联合部署协作式智能交通系统。该联盟与基础设施行业、道路当局、道路运营商、城市和地区合作,部署基于IEEE 802.11p(ETSI ITS G5,WLANp)的V2X标准协作车辆[18]。通过从2021年到2027年的欧洲地平线计划,欧盟将继续资助与车辆网络和ITS有关的项目。正在进行的项目包括SwiftV2X、5GMED、BEYOND5、5G IA和SECREDAS,旨在发展汽车和移动通信行业的创新,以支持快速和成功地走向更安全和更高效的未来驾驶。
在日本,在政府项目的支持下,除了一系列的项目和研究(ASV、能源ITS、ITS绿色安全)之外,还开发了许多服务(VICS、ETC、Smartway、ITS Spot服务)。在跨部战略创新促进计划(SIP)第一和第二阶段的支持下,研究和开发活动以及加强工业、学术界和政府之间的合作继续进行。通过SIP的自动驾驶通用服务(SIP-adus),自动驾驶的范围将扩大到公共道路,推进自动驾驶技术在物流和运输服务领域的实际应用[19]。政府单位与工业界人士(汽车制造商、电信设备制造商、电信运营商、广播公司)和大学一起成立了ITS信息通信论坛,目的是研究、开发和规范ITS的通信系统,加强沟通和协调,增加公众对ITS的了解[20]。
政府、相关行业部门和组织对实现车辆通信的巨大兴趣是值得注意的。在过去的几十年里,这个领域已经见证了许多发展,5G的利用是一个自然的趋势,以满足这个不断增长的部门的需求,特别是当我们进入自动驾驶和互联汽车的时代。
V2X用例
在本节中,详细介绍了V2X用例、挑战和潜在需求。图2显示了V2X通信类型[21]。V2X通信通常是双向的。V2V和V2P允许交换信息,如位置、速度和方向以避免事故。V2I和V2N可以包括车辆通过5G网络与交通控制人员或服务器的连接。像RSU这样的基础设施可以作为中继器来扩展V2X连接。还值得注意的是,V2P用户设备(UE)的特性可能不具备以相同周期发送/接收信息的能力(电池容量、无线电灵敏度),如支持V2V通信的UE。
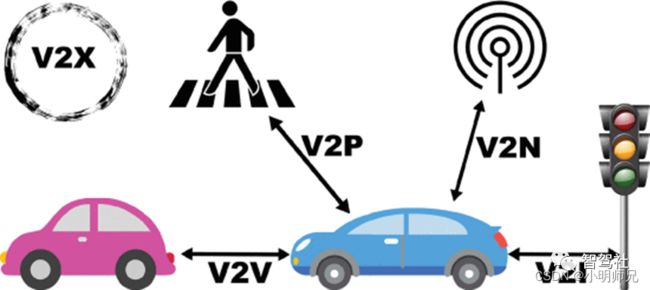
图2. V2X的类型(V2V、V2P、V2N和V2I)
由于这些多样化的通信类型、有限的可用通信资源、车辆的流动性、所交换数据的不同重要性以及车辆可交换的大量数据,有必要控制通信的优先级。5G运营商应该能够控制不同服务的相对优先级,如区域或国家监管服务(应急、公共安全)、运营商政策、安全相关和非安全相关的V2X应用信息[22]。
根据[23],基本安全应用V2V/V2I至少需要分配20 MHz,而其余的V2V/V2I/V2P应用需要分配30 MHz。这些范围的分配因世界各地区和负责监管的机构而异,如ETSI和CEPT、美国的IEEE和韩国的TTA。
为了制定和改进V2X操作,各种标准化组织致力于将V2X服务分为几组,每组包括几个用例[24] [25] [26]。每个用例的细节一般以描述和条件开始,此外还有几个必须满足的要求。除了组内的不同分类、环境或场景之外,组织的多样性也导致了用例的多样性。尽管有这种多样性,用例最终在要求方面趋于一致,并导致车辆通信需求的确定,但从不同的角度来看。
5G汽车协会(5GAA)提供了一个分层次的模型[23]。在最高层,道路环境被定义为V2X用例发生的地方(十字路口、城市和农村街道、高速路、停车场等)。在中间层次,提出了包括根据特定状态的要求的用例。在最底层,场景或故事被定义为来自不同情况的用例,可能涉及不同的具体要求,如自动和半自动驾驶的情况。5GAA定义了12个用例,但当考虑场景或衍生故事时,这些用例加起来有30个不同的案例[24]。这些用例属于以下一个或多个分类组:安全、车辆运营管理、便利、自动驾驶、排队、交通效率和环境友好、社会和社区。在[24]中,5GAA提供了对用例、场景或由其衍生的故事的描述和详细解释,以及相关的服务水平要求(SLR)。SLR提供的数值(范围、有效载荷、延迟、可靠性、速度、密度、定位、互操作性)有助于开发解决方案,创建测试程序,并评估频谱需求。图3显示了由5GAA定义的两个用例的说明性例子。图3a说明了交叉交通左转弯辅助用例,该用例涉及协助试图左转弯的车辆,并警告它不要被相反方向的车辆接近,无论是左边还是右边。图3b说明了易受伤害的道路使用者用例,该用例提醒车辆注意正在接近的易受伤害的道路使用者,并警告其有碰撞风险。

图3.(a), (b) [24]中定义的一些用例。(a)说明了交叉交通左转弯辅助用例。(b)说明了易受伤害的道路使用者用例。
第五代通信汽车研究和创新(5GCAR)又提供了五类用例:联合操纵、联合感知、联合安全、自动导航驾驶和远程驾驶[25']。在每一类中,5GCAR选择一个典型的用例来代表它,并确定最迫切的要求和关键性能指标(KPI)。
在其最新的技术报告中,第三代合作伙伴项目(3GPP)确定了25个用例。这些用例被分为4个主要组别,此外还有一个一般用例组和另一个用于车辆服务质量的用例[26]。与[24]中的用例故事或场景类似,3GPP为每个用例定义了几个自动化水平(LoA),这为不同的自动化水平(从0-无自动化到5-完全自动化)创造了不同的要求。关于本调查中的用例组,主要依靠3GPP报告的内容,一方面是它的全面性(它统一了七个制定通信标准的组织),另一方面是其报告的新颖性(V2X场景Rel-16)。
为了更好地了解车辆通信面临的挑战,回顾了3GPP定义的4个用例组。而这4个组中所有用例的进一步信息和要求可在[26]中找到。在接下来的段落中,端到端延迟是指将某一信息从源头传输到目的地所需的时间,这是在应用层面上测量的,从源头发送到目的地接收的那一刻。而可靠性(%)是指在给定延迟期间传输X字节的概率,即从无线电协议第2/3层SDU入口点到无线电协议第2/3层SDU出口点传递一个小数据包所需的时间。
A. 车辆列队行驶
根据[26],排队支持形成一组车辆(即排),这些车辆在一个虚拟链中相互连接。车辆在同一个排中交换信息,从而缩短距离(排成员之间),节省燃料,并减少司机的数量。车辆排查用例组包括一组用例,允许动态形成一个单位的车辆一起行驶。
1)eV2X对车辆列队行驶的支持
V2X必须涵盖以下方面:
加入/离开:车辆交换信息以形成一个排,分配一个排长,并允许车辆加入或离开排。
提醒/警告:排与相邻车辆交换信息,以提醒、警告和防止任何阻碍排的行动。
群体通信:包括排的车辆之间交换的信息,如走道、刹车、加速和更换带领排的车辆。
图4对这三个方面进行了说明:
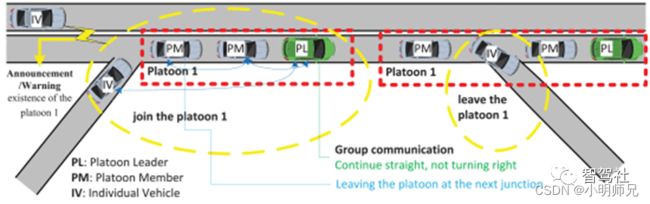
图4.车辆排队方案显示了加入/离开、公告/警告和小组通信方面
实现这一用例需要支持至少30个合作意识信息(CAM)/秒。为了防止安全威胁,必须对信息进行加密,并且必须达到适当的安全水平。考虑到排队的挑战性情况:1)车辆之间的距离可以低至1米,2)速度可以达到100公里/小时,3)考虑到往返时间、处理延迟、信息传输频率高达100赫兹,系统应支持信息大小约为50-1200字节,可靠性达到90%。要求的详细清单见[26],[27]。
2)排内信息交换
排内的信息交换可分为排内车辆之间通过V2V交换的信息(每辆车都有一个独特的标签)和从RSU接收到的排内创建者的信息。排的创建者(排的管理者)则负责与排的成员分享这些信息,以及对排的成员报告的交通数据进行实时更新,并通过V2I将其传达给RSU。高精度的动态驾驶地图将基于排内共享的信息而建立。
在这个用例中,谈论的是支持V2V通信的最大延迟为10毫秒,在UE和RSU之间通过另一个UE每秒发送两个V2X消息的可变有效载荷为500毫秒。
3)短距离分组的自动合作驾驶
协作驾驶在确保更有效地利用道路、减少拥堵、提高安全性和燃油经济性以及减少温室气体排放方面发挥着重要作用。一组车辆可以自动连接,实现变道、并线、在组内车辆之间通过,以及在组内插入/移除车辆。合作短距离编组(CoSdG)表示车辆之间的距离非常小的情况,其中转化为时间的距离约为0.3秒或更短(速度为80公里/小时时为6.7米)。
CoSdG分为两个阶段。第一阶段是一组由系统完全自动驾驶的车辆,除了领先的车辆通常由受过训练的专业司机驾驶。在第二阶段,所有的车辆包括领头的车辆都由系统完全自动驾驶。
这使得该用例的要求因阶段不同而不同。一般来说,支持V2V应用的两个UE之间的信息传输应支持小于5ms的延迟。对于第一阶段,必须支持不超过25毫秒的延迟,用于触发和定期传输300-400字节的数据包,目标交付可靠率大于90%。而在第二阶段,必须支持两个UE之间传输V2X信息的通信延迟不超过10毫秒。在80米的范围内,应支持每25毫秒最多1200字节的一个数据包传输,目标交付可靠率大于99.99%。另外,必须支持0.1米的相对横向位置精度,小于0.5米的相对纵向位置精度,以及每英里3100-4300辆左右的拥挤交通的高连接密度。
4)有限自动排队的信息共享
这种情况可以归类为LoA 3的自动排队,假设车辆之间的距离很短(2秒*车速),交换抽象的/粗略的数据就足够了。共享信息在合作感知和合作操纵中是有益的,在这种情况下,通过本地传感器检测到的物体和驾驶意图的信息被共享。
这些用例要求包括支持UE之间2.75 Mbps的数据速率和UE与RSU之间2.5 Mbps的数据速率。此外,该用例要求支持定期广播/多播消息的传输,两个UE之间的消息有效载荷为6500字节,UE和RSU之间的消息有效载荷为6000字节。在两个UE之间直接或通过RSU传输消息时,应支持每个UE每秒50条消息的最大频率和20ms的最大应用层端到端延迟。
5) 完全自动列队的信息共享
与前一个用例一样,该用例支持信息共享,但除了需要交换高分辨率数据外,还需要有LoA 4和5。
关于要求,它们比前一个更严格。例如,必须支持UE之间65Mbps的数据速率和UE与RSU之间50Mbps的数据速率。
6) 改变驾驶模式
驾驶模式分为三种类型:自动驾驶、车队和列队。改变驾驶模式的必要性在于,如果继续以列队模式驾驶,会导致交通事故。图5提供了一个需要改变驾驶模式的场景的说明。车辆A是列队的领导者(A、B和C),车辆A检测到一个障碍物,并意识到车辆E在列队组附近。列队和车辆E之间的预期车辆碰撞可以通过改变列队(A、B和C)的驾驶模式,使其成为一个独立的自动驾驶来避免。这个用例要求一个UE和多达19个其他UE之间进行可靠的V2V通信。
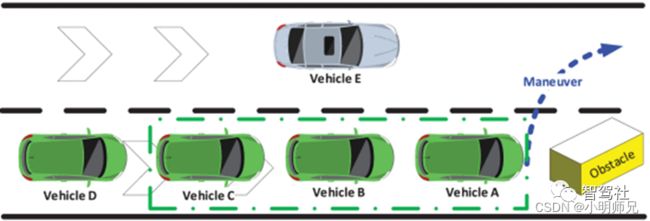
图5. 一个需要改变驾驶模式的场景[26]
在我们对5G V2X服务(Release 16)中有关车辆排队用例组的技术规范进行审查后,尽管它在2018年发布[26],但这个用例组在文献中没有得到明显的关注。下面回顾一下文献中提到的为满足车辆排队的要求而提出的技术和解决方案。文献[28]研究了多车道合作排队情况下的排队合作,提出了组建排队和分配资源的两步策略。为了最大限度地扩大排的规模和降低功耗,设计了一种基于动态编程的子信道分配和控制功率的算法。参考文献[29]介绍了一个基于合作式自动驾驶的5G-V2X原型系统的设计,该系统使用实验性的下一代无线接入网络平台、协作式驾驶排和提供动态3D高清地图服务的移动边缘计算服务器(MEC)开发。此外,作者提出了两种人工智能算法,以减少CAPEX和OPEX,并解决5G-V2X网络的复杂优化问题。作者在[30]中介绍了认知网络管理的理念,并介绍了其在ITS场景中的优势。作者提供了一个排队场景的性能分析,并建议通过在RSU之间迁移服务来增加网络基础设施的协调性。根据区块链技术,特别是以太坊,[31]提出了一个动态的自动车辆排队管理,允许有效管理加入/离开方面,并保证排队领导的利益。
B. 远程驾驶
该用例组旨在远程控制车辆驾驶,无论是由人类还是云/边缘计算应用。在自动车辆因道路上的意外情况而无法自动驾驶的情况下,远程驾驶是必要的。远程操作支持(TeSo)使单个人类操作员能够在短时间内远程控制自动车辆。远程驾驶也可用于驾驶在危险和恶劣条件下运行的车辆,或者只是为了让驾驶员不必亲自在车内。通过提供视频广播和执行实时发送的命令的能力,可以进行人的远程驾驶。因此,这个人可以感知周围的环境,就像他/她在车里一样。当用程序化的应用程序取代人的操作时,将产生对计算的需求。随着计算的使用,与其他车辆沟通的能力将增加。在此提及使用车辆应用程序的自动驾驶和使用云计算或边缘计算的远程驾驶之间的区别。图6提供了这种用例的说明,其中包括远程驾驶或云/边缘远程驾驶应用的接口。
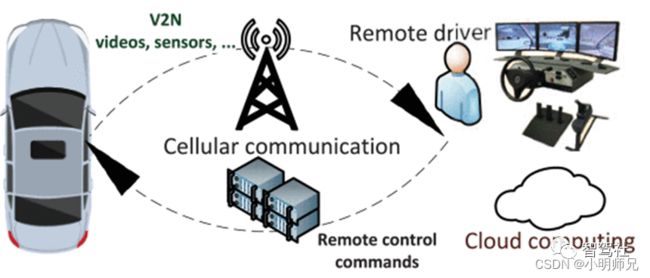
图6. 远程驾驶的一般结构
为了支持这个用例组,在绝对速度高达250公里/小时的情况下,V2X通信必须在下行链路上支持高达1Mbps的数据速率,用于车辆接收与应用相关的控制和命令信息,在上行链路上支持25Mbps的数据速率,用于从车辆发送视频和传感器数据。为了避免应用故障,3GPP系统应支持超高的UL和DL可靠性(99.999 %或更高)。而对于快速的车辆控制、反馈和安全相关的V2X应用,V2X应用服务器和UE之间必须支持5ms的端到端延迟[26]。基于3GPP的LTE和WAVE/ITS-G5都不能满足这种延迟要求[32]。
爱立信的报告[33]描述了开发远程驾驶能力是将自动驾驶巴士引入公共交通系统的先决条件之一。通过斯堪尼亚公司进行的实验,由远程操作员驾驶公交车在其测试轨道上行驶,报告显示,5G概念验证网络并不是完整的远程操作系统中最大的延迟来源。造成延迟的其他因素包括伺服机械,以及视频编码和解码。虽然在研究过程中,网络延迟往返时间(RTT)大多保持在50毫秒以下,但通过5G无线接入,网络延迟得到明显改善,网络RTT降低到4毫秒以下。在一项关于5G路侧网络远程驾驶可行性的研究中,作者在[34]中建议,初始阶段的远程驾驶应限于特定的道路(关键路线的定制网络设置,以提供例如一些专门的后勤服务)。而在广泛的网络区域内,特别是在高负荷/干扰条件下,远程驾驶的提供是无法保证的。事实上,99.999%的可靠性要求在广域范围内是不可行的,必须确定远程驾驶失败的情况,并且必须集中精力在本地解决这种情况[34]。
C. 扩展传感器
这一组包括三个用例。1)传感器和状态图共享(SSMS),2)环境的集体感知(CPE),和3)自动驾驶的视频数据共享(VaD)。扩展传感器用例组可以交换通过本地传感器、实时视频图像、RSU、行人设备和V2X应用服务器收集的原始或处理的数据。如图7所示,车辆可以增加对其传感器所能检测到的环境的认识。
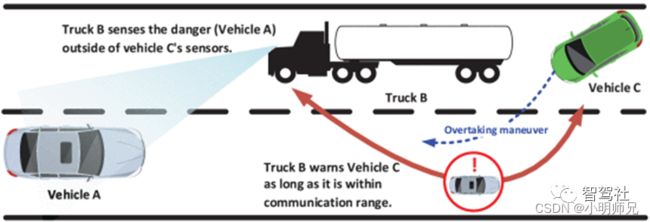
图7. 对环境的集体感知 [26]
SSMS是ETSI和ISO的报告和技术标准中本地动态地图(LDM)的延伸[35], [36]。虽然SSMS比LDM的优势在于其更高的时空保真度、低延迟和从超本地过渡到交通链接到网络区域的 "状态图 "感知的能力。[37]中的披露提供了一种集体感知的方法,包括接收本地动态地图,根据接收到的本地动态地图创建本地集体感知地图,将本地集体感知地图分发到多个ITS站中的至少一个。
CPE通过共享实时信息(基于车辆传感器信息或来自RSU的传感器数据)来增强车辆环境感知,以避免发生事故,目的是建立一个全方位的视图。这种信息共享允许增加有限的传感器视野,以探测本地传感器看不到的区域内的物体和障碍物,例如坡道后面、弯道或房屋角落后面的物体。经过预处理的传感器信息被用来提高一系列合作性自动驾驶用例的环境感知能力(例如,自动向前避免碰撞、超车和变道)。虽然VaD在某些情况下可以补充CPE的作用,但先前处理的数据共享是不够的。共享高清视频数据可以更好地支持驾驶员根据他们的驾驶能力和安全偏好做出操纵决策。
对扩展的传感器组的性能要求根据用例和LoA的不同而不同。这些要求可以归纳为10-1000Mbps的高数据速率,3毫秒到1000毫秒的延迟,至少1600个有效载荷字节,可靠性在90%到99.999%之间[26]。
作者在[38]中提供了一个分析模型来分析基于LTE-V的集体感知服务的性能。研究内容包括该服务对车辆环境感知的贡献、检测冗余度以及被感知对象的信息新颖度。基于LTE-V的服务可以显著提高前面提到的所有指标,但可能还需要进一步改进,以满足车辆安全应用的延迟要求,如协作自适应巡航控制(C-ACC)和变道辅助(LCA)。分析还表明,分散式拥堵控制(DCC)对于某些场景是必要的。而[39]中的作者认为,在未来的C-ITS用例中,随着对带宽需求的增加,传感器数据的密集交换将加剧无线电信道负载的增加问题。因此,作者提出了一个在车辆交通和通信条件不断变化的环境中的集体感知服务建模。研究的重点是合作感知(CA)和集体感知(CP)场景下的信道繁忙率(CBR)。仿真结果显示,当两种服务(CA和CP)在同一信道上同时使用时,所提供的CP服务的质量明显下降了。作者支持部署多通道V2X解决方案,并建议数据密集型应用使用不同的通道。正如前面提到的[38],如果可能的话,每个通道必须有自己的DCC。
D. 高级驾驶
高级驾驶使高LoA达到完全自动驾驶,假设车辆之间的距离更长。每辆车和/或RSU与附近的车辆共享从其本地传感器获得的数据,从而使车辆能够协调其轨迹或机动。此外,每辆车与附近的车辆分享其驾驶意图。该用例组的好处是更安全的旅行,避免碰撞,并提高交通效率。该组包括7个用例:
- 协作避免碰撞(CoCA)
- 有限自动驾驶的信息共享
- 完全自动驾驶的信息共享
- 紧急轨迹对准(EtrA)
- 城市驾驶的交叉口安全信息提供
- 自动驾驶车辆的合作变道(CLC)。
- 用于V2X场景的3D视频合成
高级用例CoCA的与众不同之处在于,它是为联网的自动驾驶车辆准备的。通过3GPP V2X通信,车辆能够更好地评估发生事故的可能性并协调机动。通常的CAM、DENM安全信息、来自传感器的数据和行动列表,如制动和加速命令,都会被交换,此外,车辆之间的横向控制以及纵向控制也会被交换,以协调道路交通流。为了在十字路口进行协调的安全驾驶操作,并在车辆之间交换预先计划好的路线,[27]规定了延迟小于10ms、可靠性高于99.99%的要求,此外还有10Mbps的吞吐量和最多2KB的消息大小。
有限自动驾驶和完全自动驾驶的信息共享之间的区别是LoA,如[40]所定义。对于有限的自动驾驶(LoA 3和LoA 2),粗略的数据交换就足够了,当自动驾驶系统不再能够支持自动化时,驾驶员也有望完全控制。至于全自动驾驶(LoA 5和LoA 4),需要高精度的数据交换,而且预计自动驾驶可以在没有人类干预的情况下进行控制。在这两个用例中,它都需要共享合作感知和合作操纵方面。这些方面根据LoA的不同而不同,从分享本地传感器检测到的抽象物体信息到分享高分辨率的感知数据(如摄像头、激光雷达、占用网格),从粗略的驾驶意图(如改变车道或移动/停止/停车)/到所有参与车辆之间通过V2X进行合作机动的详细计划轨迹。合作感知所需的数据速率范围为每条链路0.5至50Mbps。协作机动的每条链路0.05至3 Mbps。需要高可靠性和低应用层端到端延迟(100毫秒)。所需的最小通信范围取决于车辆速度,在有限或完全自动驾驶的情况下,可以通过最大相对速度m/s乘以10或5秒来计算[26]。
为了提高交通安全,EtrA补充了合作式自动驾驶,在危险和具有挑战性的驾驶情况和不可预测的路况(即事故检测、路上的行人、货物损失和鹿群)中协助司机。当车辆从车载传感器获得道路上的障碍物信息时,它计算出避免事故的可操作性并通知其他车辆。附近的车辆开始调整轨迹,协同进行应急响应。要求的关键绩效指标是端到端延迟小于3毫秒,吞吐量为30Mbps,在500米的通信范围内可靠性为99.999%。
图8显示了交叉口安全信息系统的概念,它由道路雷达、交通信号、LDM服务器和RSU组成。我们注意到与图3b中的5GAA用例的相似性,即检测到行人,车辆被警告或自动控制以避免碰撞。本地动态地图服务器(LDM)接收车辆位置、运动信息、行人和交通灯信息,以生成LDM信息。RSU通过请求发送LDM信息或将其广播给UE。该系统可以为自动驾驶汽车提供更准确的LDM,使其安全通过十字路口,并提供各种服务(例如,行人或车辆警报警告,通过检测行人、车辆和交通信号来控制自动驾驶汽车)。
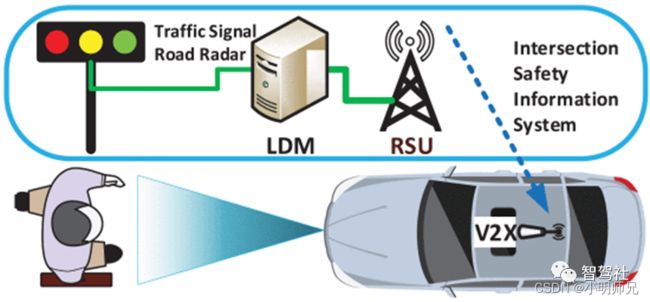
图8. 交叉口安全信息系统的概念[26]
为了确保顺利的CLC机动,车辆交换他们的预定轨迹以协调他们的横向(转向)和纵向(加速/减速)控制。支持两套关键KPI指标,在参与的车辆之间交换CLC数据包(变道机动的更新轨迹计划)。第一,车辆是半自动驾驶,要求消息大小为300-400字节,端到端延迟小于25毫秒,可靠性为90%。第二种:全自动驾驶的车辆要求消息(UE位置、传感器数据)大小不超过12KB,端到端延迟小于25ms,可靠性为99.99%。
这一组中的最后一个用例是由云端或边缘的服务器(边缘计算)创建环境的三维视频。服务器从UE接收关于环境的视频,然后处理和合并数据以建立3D视频。车辆、行人和该地区任何物体的位置、相对速度和距离都在视频中得到准确体现。这个用例对各种场景下的分析都很有用,比如在汽车比赛中与最终用户分享视频,由执法部门评估潜在的事故等。为了支持4K/UHD视频,系统必须支持每个UE的上行10 Mbps数据速率。UE应该能够每秒计算50个绝对位置固定,服务器也必须能够同步从不同UE接收的不同视频[26]。
作为高级驾驶KPI的总结,3GPP系统应该支持300到12000字节的消息有效载荷,每秒10到100条交换的消息,端到端延迟在3到100毫秒之间,可靠性在90%到99.999%之间[26]。
作者在[41]中介绍了系统设计和现场测试,以实现CoCA/EtrA在关键交通场景(因行人等意外障碍物而紧急制动)中的协作自动驾驶。研究表明,超低延迟允许两辆车之间几乎同时制动,使它们之间的行驶距离更小。延迟对系统性能的影响也大于数据包交付率(PDR),当延迟增加到100毫秒且有90%的PDR时,两辆车之间就会发生碰撞。在[41]中,测量了几个关键绩效指标(单程时间、有经验的用户吞吐量、PDR、延迟和丢包),但没有评估其他关键绩效指标(如交通量密度)。除了现场测试外,[29]还提供了一个协作式自动驾驶原型系统的设计。该系统由一个NG-RAN实验平台、一个合作驾驶车辆排和一个提供高清3D动态地图服务的MEC服务器组成。现场测试表明,原型系统的KPI可以满足5G-V2X的QoS要求,即低延迟3ms和高可靠性99.999%。虽然这些结果证明,在一定程度上,这个现场测试系统可以提供满足5G-V2X QoS数据速率要求的服务。现场测试结果也证明了5G-V2X对自动驾驶技术有很大的促进作用。但为了满足超可靠、低延迟、高流量、高移动性的要求,需要大量的设备和频率等资源投入。因此,建议将两种人工智能算法(基于深度学习和蜂群智能)作为优化工具,在5G-V2X网络的商业部署过程中减少CAPEX和OPEX。除了这些工具,[29]中的作者建议引入多跳技术和认知无线电技术,其效果是扩大V2V通信的范围和增加频率资源。为了解决合作式自动驾驶的要求,[42]中提出了一个运动学信息辅助的以用户为中心的超密集车辆网络架构。特别是,分布式本地接入和应用中心托管在MEC服务器上,被设计为既是应用中心又是以用户为中心的接入控制中心。结果表明,关于可支持的车辆密度、数据速率、可靠性和延迟的要求可以同时得到满足,但需要仔细选择关键参数。然而,关于拟议的性能测量策略集,还需要更多的工作。必须开发实用的算法,并在不同的情况下,用现实的假设和约束条件对其性能进行评估,检查运动状态的误差对系统性能的影响是至关重要的。
表2列出了前几组要求的摘要,其中数值的范围是由于信息大小、同一组内要求不同的实际用例以及方面LoA。
表2 用例组的性能要求
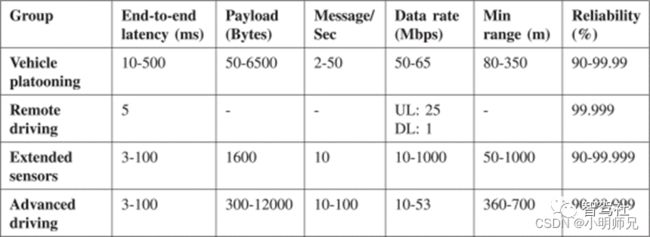
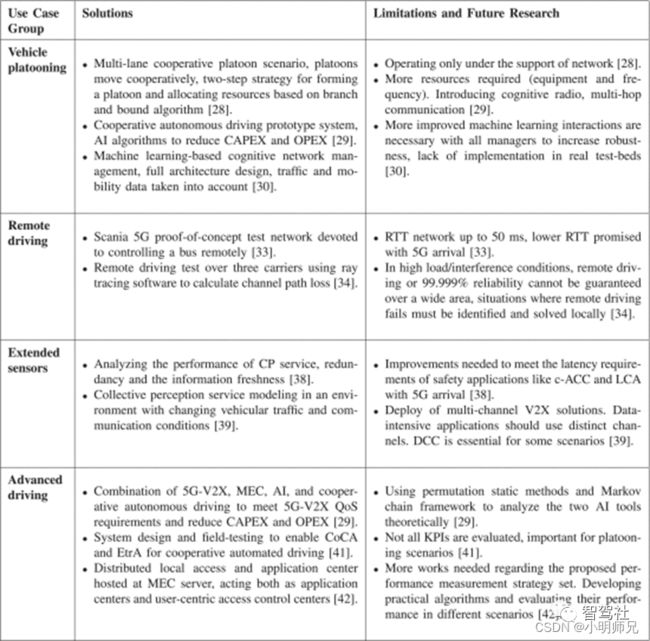
表3,列出了V2X用例的解决方案、局限性和未来研究。上面讨论的拟议解决方案被总结了。文献中提到的挑战、限制或开发这些解决方案的未来前景被列出。
表3 V2X用例的解决方案、局限性和未来研究
除了前面四组,[26]中还定义了另外两组。第一组涉及一般用例,第二组包括每组的QoS方面。一般用例之一是不同3GPP RAT的车辆之间的通信和不同场景(无覆盖、仅LTE覆盖、LTE/NR覆盖),因为车辆可以配备支持LTE或NR的模块(见图9)。如果V2X UE支持多种RAT(包括LTE和5G NR),则应选择最佳技术来支持所关注的特定应用。对最佳RAT的选择基于几个因素,包括使用特定技术的V2X UE的数量、RSU的存在、网络配置的信息(如应用ID和RAT之间的映射)或QoS相关要求。使用多RAT来提高V2X通信的可靠性在[43]-[45]中讨论。[43]中的作者评估了不同的、独立的和协调的传输方案,其中数据包是通过LTE-Uu和PC5接口传输的。而[44]则介绍了使DSRC和LTE之间有效共存。参考文献[45]进一步介绍了DSRC和C-V2X车辆网络的架构和协议集,解决了公路环境中的RAT选择、垂直切换和数据传播问题。

图9. 不同的3GPP RATs部署情况
一般组还包括一个与系统支持UE之间或UE与UE型RSU之间的消息传输的能力有关的用例,无论它们是否订阅同一PLMN。至于5G覆盖范围之外的用例,3GPP系统应允许支持V2X应用的UE在UE没有被5G小区服务时使用5G RAT进行直接通信。另一个一般的用例是动态乘车共享,其中车辆共享有关自身的信息,如当前的占用率、可用容量、目的地、预计到达时间、中间停靠点等。行人可以分享关于自己的信息,如目的地、一些个人信息、证书等。如果双方所表达的条件得到满足,那么就可以安排并开始搭车共享。除了搭车共享,车辆还可以为乘客、行人等提供网络接入。对手机用户的好处在于,通过降低手机中的传输功率和降低接收灵敏度来减少电池消耗。通过将许多个人用户聚集在一个环境中,减少网络开销,可以实现吞吐量的增加。通过车辆进行系留也有利于移动网络运营商(MNO),因为它增加了与活跃用户相关的网络密度,并减少了由于将单个用户分组到一个环境中而产生的网络开销[26]。最后一个用例与电子控制单元(ECU)的软件更新有关。ECU需要定期更新,包括主要的安全检查,这是汽车行业的一个重要话题。当车辆与附近的RSU通信并检测到需要进行ECU软件更新时,RSU将通知UE需要进行更新。用户将能够从更新列表中选择所需的更新,例如。用户还必须能够拒绝/推迟对ECU的更新请求。
第四节 5G V2X方法学
车载通信最初是基于Wi-Fi技术设计的,即IEEE 802.11p与5.9GHz频段的专用短程通信(DSRC),以实现车载Ad-Hoc网络(VANETs)。美国和欧洲的术语 "车内环境无线接入"(WAVE)和ITS-G5,分别指的是一套车内移动无线通信的配套标准。自这些最初的发展以来,蜂窝式V2X(C-V2X)也被提出,其中C-V2X可以在5.9GHz频段以及蜂窝式许可频段中运行[7]。DSRC和C-V2X都在进行重大改进,以支持先进的车辆应用,如前面介绍的用例中的应用,它们需要高可靠性、低延迟和高吞吐量。IEEE 802.11bd或下一代V2X(NGV)(基于WLAN技术),以及5G-V2X/NR-V2X被开发为解决方案,以满足V2X通信的这些新需求[46]。根据[46]中的理论计算,NR-V2X的性能优于IEEE 802.11bd。尽管如此,基于802.11的V2X是大量文献研究和开发的主题[47]-[49]。
今天,车辆有大量的传感器,如雷达、超声波、LiDAR和摄像头。基于WLAN的V2X范围有限(小于1公里),而且吞吐量也有限,这阻碍了满足这些先进的车辆应用要求的能力,而NR-V2X是基于为高速移动应用设计的技术,专门为V2X用例开发。通过使用设备对设备和侧链通信,NR-V2X支持车辆、基础设施和行人之间的直接通信,甚至在覆盖范围之外。此外,5G-V2X支持设备到网络的通信,从而有助于V2X应用的扩展和多样化。
下面提到关于如何在5G网络中支持高级V2X用例的最新技术和研究。将从5G用例在车辆通信领域的应用开始,然后介绍研究人员在无线电层面遵循的策略,以满足5G背景下V2X应用的要求,最后介绍用于实现这些应用的技术。
A. 应用于V2X的5G用例
根据ITU和3GPP等标准化组织,5G的发展努力是针对三个主要的服务支柱类型。在本节中,我们回顾这些服务类型,并将它们与V2X用例联系起来,如图10所示。
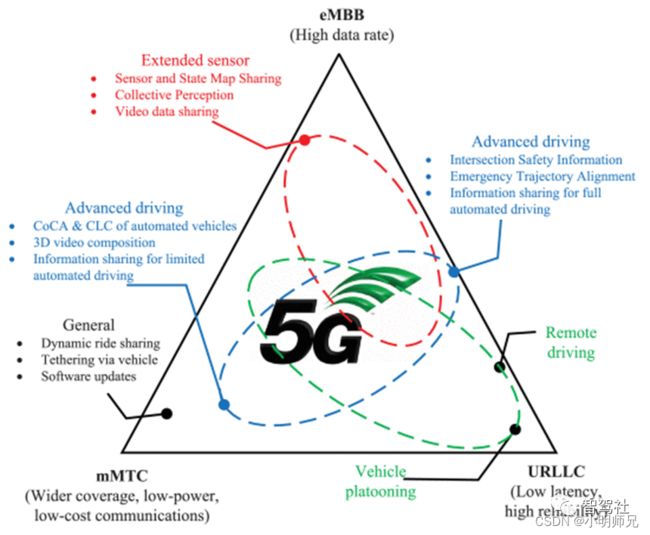
图10.将V2X用例映射到5G的三个支柱
1) eMBB
eMBB是为部署5G NR而开发的首批场景之一,旨在提高数据驱动的用例中的数据速率,这些用例要求整个覆盖区域的高数据速率,并确保包错误率在10-3之间的可靠性[50]。这将允许访问诸如虚拟现实、增强现实和超清或360度的直接视频传输等服务,同时尊重延迟和可靠性要求[51]。
eMBB对V2X应用的重要性来自其满足高级V2X用例对高数据速率要求的能力。通过为上行链路提供至少10Gbps的数据速率,为下行链路通道提供20Gbps的数据速率,eMBB在各种多媒体服务(例如,车载视频会议/游戏、高清地图下载)中发挥着重要作用[52]。
在eMBB用例方面,[53]提出了一个基于网络切片的解决方案,用于高速公路上有异质交通需求的车辆,重点是自主驾驶和信息娱乐这两个切片,分别包括安全信息和视频流。而[54]正在讨论在同一RAN基础上支持eMBB和V2X切片的RAN切片问题,提出了一个基于离线强化学习(Q-learning和softmax决策)和低复杂度启发式方法的解决方案来改善两个切片之间的资源分割和使用。
注意到eMBB对V2X应用的重要性,特别是考虑到扩展传感器组的高数据速率要求(见表2),或像远程驾驶那样分享高精度视频。eMBB甚至还有非安全应用,如信息娱乐和多媒体服务。
2)URLLC
与eMBB一样,URLLC是5G NR支持的用例之一,如3GPP Rel.15所述,并在Rel.16中顺序改进。它的开发是为了满足延迟敏感应用的需求。我们谈论的是1毫秒或更少的延迟,端到端的安全性,10-5的小数据包丢失和99.999%的可靠性。URLLC的用处出现在实践中,当一个外部事件作为警告或警报发生时,所以我们需要无延迟和非常高的可靠性向有限数量的UE发送少量数据[50]。URLLC的传输是非周期性的,并由调度(基于授予、免授予/配置授予调度)支持,以保证高可靠性和有效利用资源。零星的通信要求通过可用资源的可预测性、使用多个频率或空间资源的多样性以及随机访问来满足[50], [55]。
大多数V2X用例可以被认为是对延迟敏感的应用。通过URLLC,可以实现高水平的自动化,如互联自动车(CAVs)的应用。回到表2,注意到,列队、远程驾驶、高级驾驶和扩展传感器等用例都需要1毫秒的低延迟土壤和高达99.999%的可靠性。V2X应用可以从URLLC功能中受益,但要在提供的网络覆盖范围内[56]。URLLC是V2X研究中的一个重要课题,正在不断发展,在文献中研究的重点是资源分配、能源节约以及URLLC与MEC的整合,以改善延迟、吞吐量和计算密集型处理[56]-[58]。
3) mMTC
与URLLC一样,mMTC通信是零星的,数据是随机传输的,但mMTC支持在更大的区域内有大量的连接机器/物体,以实现低功耗、低成本、低复杂性和低传输率的通信,数据包错误率为10-1[50], [59]。由于使用无线电资源的活跃设备的数量是可变的,因此有必要通过随机访问提供可用资源。窄带物联网(NB-IoT)和增强型MTC(eMTC)由3GPP指定,分别支持长距离和中距离物联网应用,可以满足5G mMTC需求[59]。
由于有了mMTC,车辆将能够不断地从部署在汽车或基础设施内的内置传感器中感知和学习环境变化。mMTC在密集的互联环境中发挥着重要作用,以支持非延迟敏感的V2X应用(例如,动态乘坐共享,软件更新),甚至为安全相关的应用提供更多数据。
B. 扶持战略
实现上述车辆通信方案的使能技术多种多样,但可分为三个主要目标或战略。第一个策略是利用新的/未被使用的频谱,如5GHz左右的频段或毫米波频段的情况。第二种是通过网络的空间密集化和划分为更小的单元以及以有效和智能的方式使用资源来实现资源的再利用。最后,提高频谱效率,这包括先进的编码和调制系统、多小区干扰管理、智能天线和多天线系统。
1) 频谱开发
开发新的/未充分利用的频谱是最直接的策略之一。未被充分利用的频谱可以在同一网络内的不同节点上共享。新频谱的分配,如5GHz左右的频段和毫米波(mmWave)频段,是未来一代移动通信的有力候选者[60], [61]。使用未经许可的和共享的频谱带来了一些挑战。因此,人们正在努力开发几种管理和访问资源的技术,如不同的RAN、RAT和认知无线电。然而,这些方法的算法所产生的复杂性是需要考虑的缺点之一。参考文献[54]提出了一种基于离线强化学习和低复杂度启发式算法的有效的RAN切片方案,以提高网络在资源使用、延迟、可实现数据速率和中断可能性方面的性能。[62]中的工作提出将多个RAT并行结合起来,以确保V2X用例的各种要求。[63]-[65]研究了异构网络环境中V2X通信的频谱共享问题,以及V2X用户、VANET用户和其他智能无线设备在非授权频谱上的共存问题。
2)资源的再利用
现在,实现这一目标的主要方式是通过强化网络。蜂窝网络的空间密集化是通过将覆盖区域划分为越来越小的小区来实现的[66]。这使得系统可以更多的重复使用频率,从而提高每个区域的网络容量。因此,微蜂窝、小蜂窝、微微蜂窝和毫微蜂窝将在5G中广泛部署。然而,网络密集化将导致额外的成本。
3)提高频谱效率
出于经济性和可靠性的考虑,这一策略是运营商和研究人员的首选方法。在这一领域已经研究了许多方法,如基于人工智能的切片策略[54],平行组合多个RAT[62],[64],以及网络的虚拟化[67]-[69]。然而,在过去的几年里,这些方法在目前的技术下变得非常复杂,所以人工智能算法正在参与进来以降低复杂性[67]。
C. NR V2X接口
1) NR Sidelink
用于V2X的NR SL的设计是对LTE SL的发展,并基于设备与设备之间的直接通信。
3GPP在[70]中根据V2X SL通信的架构,将操作场景分为多无线电双连接(MR-DC)和独立场景,如图11所示。在独立场景中,一个主节点(gNB、ng-eNB或eNB)正在控制/配置UE的V2X SL通信,图11(a)。在MR-DC场景中,UE被配置在(NE-DC、NGEN-DC或EN-DC),而UE的V2X SL通信由Uu接口控制/配置,图11(b)。
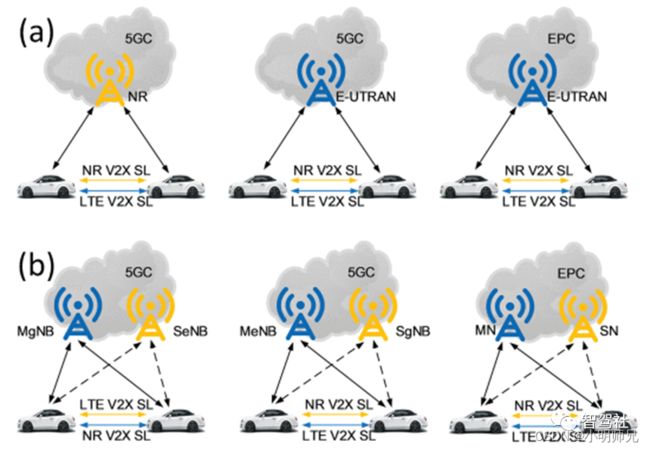
图11. NR V2X操作场景。(a) V2X SL独立场景,(b) V2X SL MR-DC场景[27]
V2X NR SL同步取决于SL主要同步信号(S-PSS)、SL次要同步信号(S-SSS)、物理SL广播通道(PSBCH)以及SL同步源和程序。同步源(GNSS、gNB、eNB和NR UE)与同步优先权相关[71]。
[71]中的作者提出两种SL资源分配模式。在第一种模式中,基站(BS)将SL资源安排给UE用于SL传输。而在模式2中,UE在BS/网络配置的SL资源或预先配置的SL资源中指定SL传输资源。NR SL允许V2X在不同模式(RRC_CONNECTED、RRC_IDLE和RRC_INACTIVE)下通信。对于空闲和非活动模式,V2X SL通信是使用V2X特定的系统信息块(SIB)实现的,包括小区特定的配置[71]。
2)NR Uu
UE和基站之间的通信是由NR Uu或LTE Uu接口提供的[72]。正如在IV-C1中所说,除了长距离通信外,Uu接口还用于控制和配置直接短距离通信NR SL的资源。LTE Rel-15采用了基于缩短传输时间间隔(sTTI)帧的高可靠低延时通信(HRLLC)技术,使32字节的数据包在1毫秒的延时内以10-5的块错误率传输。在Rel-15和Rel-16中,NR超可靠低延时通信(URLLC)功能被引入,作为Uu接口的改进之一。在一个小区内,对于一个特定的带宽部分,NR可以支持多个活跃的UL配置的授予,但UE一次只使用一个来传输。多媒体广播单频网(MBSFN)和单小区点对多点(SC-PTM)是此前LTE中定义的基于Uu的多播/广播的两种技术。NR Uu多播/广播有望在Rel-17中实现标准化,这将提高某些用例场景的资源利用率。
D. 技术应用
下面回顾一下最重要的技术及其在车辆通信领域的应用。这些技术经常重叠或使用其他技术来满足V2X通信的需要。对于每一种使能技术,我们都提供了该技术的简要定义、关于该技术如何满足V2X要求的技术讨论,以及文献中的相关研究。图12展示了一个涵盖这些技术的高层次架构。在接下来的段落中,通过技术讨论和文献中的应用回顾来分析这个架构。
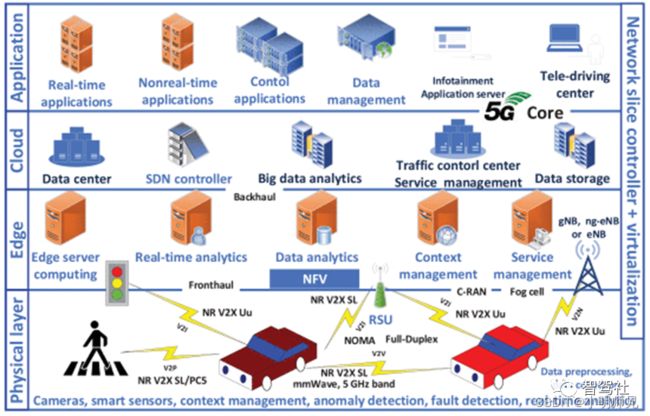
图12.分层的5G V2X高层架构
1)NFV
NFV是一个出现在2012年10月的概念,虚拟化技术被用来引入一种新的网络服务形式,目的是促进网络设计和降低成本(即CAPEX和OPEX)。NFV的要点是将物理网络设备和其功能分开[73]。
3GPP、ETSI和5G PPP为提供愿景和技术规范做出了不懈的努力,以改善基于NFV的5G管理和部署。这以后在实现网络切片、云无线接入网(C-RAN)、移动边缘计算、多领域和多供应商协调以及网络可编程性方面发挥了基本作用[68], [74], [75]。
VNF和NFV这两个术语有时可以互换使用。参考ETSI发布的NFV版本[76],可以对这两个缩略语进行区分,尽管它们有相关的含义。VNF指的是使用独立于底层硬件的程序实现网络功能,而NFV指的是操作软件定义的网络功能的更全面的含义,而不考虑任何具体的硬件平台。换句话说,除了NFV基础设施(NFVI)和网络功能虚拟化管理和协调(NFV-MANO)架构框架等其他组件之外,VNF可以被描述为NFV框架的一个组件。
NFV可以通过模拟可以在计算平台上实现的软件应用等服务,来实现智能车载系统(IOS)[69]。目前不同汽车品牌的IOS与相关硬件/软件的封闭架构,使得开发IOS的任务复杂而昂贵。一项研究[77]利用V2X中NFV的优势,开发了一种新的数据包分类算法。该方法解决了OpenFlow交换机由于政策规则过多而导致的溢出问题,因为网络遭受了长的数据包延迟和频繁的数据包丢失,从而无法支持V2X服务。为了缓解交通拥堵和堵塞,[78]中的作者提出了一种利用NFV和MEC技术的方法,他们使用NFV用虚拟机(VM)来模拟蜂窝基站。这项工作通过一个现实的紧急用例证明了该方法的效用。为了解决网络拥堵和调度车辆网络资源的问题,在[79]中,提出了一个智能NFVs选择策略。为了满足不同车辆服务的质量要求,该策略依赖于流量识别的方法。该方法则使用深度神经网络和多粒度级联森林对不同的服务行为进行分类。而[80]中的作者处理了NFV部署中物理层的资源分配。由于物理层的资源是有限的,特别是为了支持URLLC通信,以及NFV节点的各种要求,因此需要稳健和高效的资源分配算法。研究[80]提出了一种基于改进的极值优化的洗牌蛙跳算法来设计资源分配算法。
NFV、SDN和网络切片是相互关联的技术,形成了一个架构,可以控制和管理V2X这样的高动态网络,同时支持资源分配和交接管理。
2)SDN
SDN是一种管理网络的方法,无需了解下层的细节。它通过集中网络智能和将控制平面与数据平面分离,使网络变得可编程、开放和动态[81], [82]。
SDN和NFV可被视为V2X通信要求的解决方案,克服了传统网络架构的局限性,特别是在高级驾驶、排队、远程驾驶和扩展传感器的用例中。SDN可以在整个网络中得到利用,从移动回程接入到进化分组核心(EPC),允许利用基于流量的SDN模型、细化策略管理、NFV和流量路由能力。基本上,基于5G和SDN的解决方案将允许根据车辆通信的要求提供资源和车辆周围环境的知识。从技术上讲,SDN控制器将根据V2X要求动态地创建政策和规则,并与RSU共享。RSU通过SDN控制器将收集的数据发送到数据中心。换句话说,对SDN协议的支持允许RSU、车辆和蜂窝网络被视为数据级SDN。这允许SDN控制器持续更新网络拓扑结构,并定期广播信标信息,让车辆了解周围的环境(关于交通数据、路线图、位置、速度和传感器数据的信息)。这里的关键点是要尊重车辆通信的延迟要求,因为蜂窝网络传输控制事件的成本很高。因此,控制和减少控制平面的延迟的方法是V2X中SDN实现的活跃话题[83]-[85]。
先进的V2X用例已经产生了对NFV和MEC等技术的需求。这是因为部署几个大型数据中心来提供云服务的传统方法会导致关键问题。例如,集中式SDN控制器方法一方面会导致控制平面拥堵,另一方面会导致策略更新和流量表管理的无限延迟。这些延迟对许多V2X用例来说是不可容忍的。SDN提供的灵活性同时也引入了对流表容量和交换机/控制器开销的限制,这需要找到解决方案来提高流表管理的效率。模糊理论和机器学习技术可以用来解决这些问题,并选择应该保存在流量表中的重复流量条目。[86]的作者概述了为确保稳定的SDN性能所做的努力。具体来说,他们提出了改善控制器处理负荷、减轻恶意攻击和提高流量表管理效率的解决方案。SDN的集中式结构面临着可扩展性和网络分区等重大限制,促使人们努力研究如何在管理多个集群时应用分散化。在[87]中,作者介绍了分布式边缘基础设施的分散SDN控制平面的概况。基础设施即服务(IaaS)的网络服务在这个由多个虚拟基础设施管理者管理的分布式架构中被分析。然而,分布式架构也带来了自己的挑战,需要在网络信息(信息的颗粒度、范围和可用性)和跨站点网络服务相关技术(自动化接口和网络技术)方面加以解决。
SDN可以与其他技术一起使用,以支持车辆通信,[88]提供了一个结合SDN和雾计算的架构,作为增强车辆网络的连接性、可扩展性、灵活性和集中智能的潜在解决方案。但根据文献[89],SDN没有满足车辆网络的延迟要求,所以提出了一个新的SDN架构,以优先满足延迟要求。参考文献[90]提出了一个与5G SDN集成的车辆网络架构,在边缘使用雾化单元来提高覆盖率,避免车辆和RSU之间的频繁交接。而[91]则更进一步,介绍了一种基于SDN的方法,通过开发面向安全的车辆控制器区域网络来检测驾驶员的警觉性。大多数研究依赖于理论或仿真结果,但作者在[92]中提出设计一个完整的SDN车辆网络原型,其中基于SDN的骨干网在OpenFlow交换机组成的真实硬件中进行测试,基于SDN的无线接入在WiFi接入点基础上进行测试。其中支持Click Modular Router和OpenvSwitch/OpenFlow。参考文献[67]提出了一个高效的网络切片管理和资源分配的基于SDN的车辆网络框架,此外还实现了机器学习以满足现代车辆网络基础设施的复杂要求。
如IV-D1所述,SDN和NFV都是V2X通信的有前途的技术,因为这些技术能够降低网络负载,从而减少延迟并提高可靠性。
3)MEC
在车辆环境中越来越多地使用计算机应用程序,这就需要满足这些应用程序的计算要求。满足这些要求的可能解决方案是通过升级车载计算机或通过提供连接到网络的中央服务器的云计算。这些解决方案已经存在问题,无论是升级车载计算机的高成本,还是在车辆环境中传统的集中式云计算的长延迟和不稳定的连接。因此,通过使计算和数据存储更接近车辆,MEC是最合适的解决方案,可以提高数据处理和计算能力,并具有适合车辆环境的延时[93]。
ETSI的行业规范小组(ISG)正在进行MEC倡议的工作。具体而言,ISG正在努力定义在多厂商、多接入的边缘计算环境中实现应用托管所需的元素。此外,MEC ISG正在努力制定标准规范,以统一云通信世界,以及在RAN内提供计算和云计算能力。该项目[94]旨在定义V2X应用对MEC的要求。讨论了MEC在支持V2X方面面临的挑战,并确定了潜在的要求和新出现的挑战。工作项目[95]旨在定义必要的API与数据模型和数据格式。同一文件还关注MEC V2X信息服务,以促进V2X在多厂商、多网络和多接入环境中的互操作性。ETSI还提供了一个框架,供ETSI ISG MEC使用,以协调和加强多厂商概念验证(PoC)项目,说明MEC技术的关键方面。为了控制移动网络的拥堵,概念验证(PoC)11项目侧重于如何协调和优先处理使用MEC服务发送到车辆的网络流量[96]。
MEC允许实现许多计算密集型的应用,这些应用在车辆环境中可能是有用的(驾驶员和乘客协助应用),如增强现实、语音识别和自然语言处理。5G通过IV-C1和IV-C2中提到的NR V2X接口,可以大大改善MEC的通信质量。在车辆环境中,MEC有时被称为车辆边缘计算(VEC),是一个活跃的研究课题,包括从自动车辆到卸载和智能卸载AI辅助、安全和隐私挑战等领域[97]-[101]。
正如之前在III-B和III-D中分别介绍的通过MEC应用进行远程驾驶或由云端或边缘的服务器创建环境的3D视频的用例中所显示的,MEC在车辆环境中有着直接的应用。为了满足5G-V2X在低延迟和高可靠性方面的QoS要求,[29]介绍了一个NG-RAN实验平台、一个合作驾驶车辆排和一个提供高清3D动态地图服务的MEC服务器。此外,在[42]中,一个功能实体或所谓的本地访问和应用中心被托管在MEC服务器上,负责应用实施和访问控制。而[58]介绍了一个支持V2X蜂窝网络的协作式MEC网络架构,允许车辆将其任务卸载到MEC服务器上,并且分布式MEC服务器可以相互协作。
MEC还与其他使能技术一起被利用,以满足车辆通信要求。参考文献[90]在边缘和雾中使用5G,通过在5G软件定义的车辆网络的边缘建立雾小区结构,可以避免RSU和车辆之间的频繁交接,并为雾小区的车辆采用自适应带宽分配方案。MEC利用的另一个使能技术是5G C-RAN,[102]提出了MEC和C-RAN的混合策略,以减少边缘计算资源位于物理节点时整数编程模型的计算工作量。
MEC与SDN和NFV等支持技术合作,旨在满足V2X通信在响应性、可靠性和灵活性方面的要求。尽管MEC承诺提供所需的响应时间和计算能力,但安全和维护隐私方面是一个重要挑战。
4)5G网络分片
网络切片允许将单个物理网络分割成多个虚拟网络,这是由SDN和NFV完成的,它们能够实现开放、可编程、应用感知、灵活和可扩展的网络切片[103]。
在车辆网络方面,由于异质流量和网络的复杂性,以及车辆的流动性和动态密度,解决方案仍然有限。
因此,[104]提出了一种新的方法,将网络切片与雾化无线接入网络结合起来,以提高资源利用率。提出的切片调度是基于交叉熵法和蒙特卡洛树搜索-快速行动值估计算法。网络资源切片本身不足以满足车辆网络的URLLC要求,[105]在网络切片方案中加入了服务和功能切片,从而提高了可靠性和延迟,支持5G车辆网络的URLLC。而[106]讨论了多维异构资源的网络切片问题,作为他们提出的空地一体化车辆网络架构的一部分,并提供了三种差异化的服务,即用于导航的高清地图切片、共同关注的文件切片和按需传输切片。网络资源分配的优化以复杂的非凸性和非线性数学编程公式结束。因此,最近的一项研究提出了一种使用MEC和深度强化学习的网络切片的无模型方法,以使信道资源得到更好的利用。信道、功率分配、分片选择和车辆分组都被考虑在内[107]。图13简单说明了V2X网络中的分片概念及其与SDN和NFV的关联。
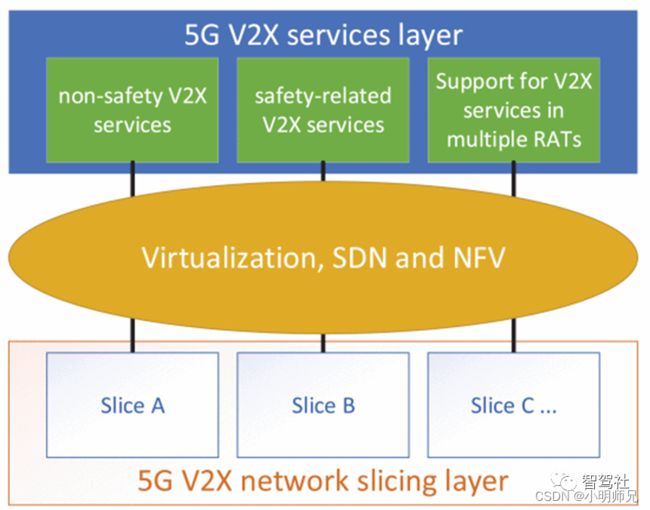
图13. 5G V2X网络切分
通过与NFV相关的SDN控制的网络切片技术,一个共同的物理基础设施可以被划分为多个逻辑网络,例如,自动驾驶切片、信息娱乐切片和远程操作驾驶切片。
5)C-RAN
C-RAN通过使无线接入网络架构基于云计算,有助于最大限度地减少移动运营商设备的CAPEX和OPEX。通过将基带单元(BBU)和远程无线电单元(RRU)与移动基站无线电单元分离,将数据处理功能归入中央服务器;允许从一个服务器控制多个无线电单元,提高网络效率,以及减少高密度地区的干扰[81]。C-RAN可以是一个中央控制器,可以访问通信通道,动态地创建和管理TP和外围设备之间的关联过程,以创建一个虚拟小区,与用户一起移动并始终围绕着用户[108]。
C-RAN是V2X用例的一项支持性技术。通过将BBU和RRU从基站中分离出来,BBU被集中到一个共享的资源池中,使用来自云的虚拟化进行重计算。由于V2X应用对延迟高度敏感,需要共享大量的数据,所以池化的资源使其更容易在边缘部署服务,改善延迟,优化资源使用,并减少数据传输压力。此外,C-RAN在构建车辆环境中多种无线技术共存的解决方案和减少信道间的干扰方面发挥着重要作用。然而,C-RAN承载着许多技术挑战,包括在网络传输层面;V2X的严格延迟要求不超过1毫秒,RRU和BBU池之间的通信链路的沉重负荷比回程要求高约50倍。此外,由于BBU中心池支持大约10到1000个基站站点,必须将大量的数据传输到云端[109]。关于虚拟化,C-RAN在Gbps范围的数据速率、极短的数据寿命和ms范围的允许恢复时间方面对云基础设施提出了更关键的要求。
对于RAN的分片,[110]将eMBB和URLLC合并到C-RAN中,通过根据资源限制正确接受分片请求,增加了C-RAN的收入,并大大节省了系统功耗。为了便于对高独立性和多功能性的车辆网络进行有效管理和集中处理,[111]提供了一种C-RAN车辆网络架构和基于离散余弦变换和Lloyd-Max算法的数据压缩方法。参考文献[102]也介绍了C-RAN,通过使用整数线性程序将C-RAN基带资源与多接入的边缘计算资源共享,以解决在车辆场景中提供可靠和低延迟服务的问题,从而实现联合部署,并具有对抗单边缘节点故障的可靠性。
C-RAN和以前的使能技术重叠,形成一个架构,增加了网络的虚拟化,提高了动态利用和管理网络资源的能力。
6) NOMA
非正交多址接入(NOMA)是基于在同一资源中为多个用户服务的原则,无论是时间、频率还是代码资源,都取决于不同的能量水平。因此,与传统的OMA相比,NOMA增强了连接性,减少了延迟,提高了用户公平性和频谱效率,并增加了可靠性[112]。当使用OMA时,连接车辆网络中的数千辆汽车需要数千个带宽信道,而NOMA可以在使用一个信道时为这些用户提供服务,这是因为NOMA的吞吐量更大,同时保证了用户的公平性[113]。然而,不完善的连续干扰消除(SIC)的问题是最近许多研究的主题[114]-[116]。
NOMA是车辆通信部署中的一个主要角色。在安全信息V2X广播的使用案例中,NOMA可以为调度和资源分配问题提供解决方案。在密集的网络中,通过NOMA可以减少延迟,提高可靠性[117]。然而,NOMA也有一些应予考虑的缺点。尽管在像车辆这样的网络节点中,功耗点不是一个关键因素,但集群内的每辆车都需要解码所有其他用户的信息,这导致了接收器的复杂性。此外,任何由SIC引起的用户错误都会导致对所有其他用户信息的解码错误。NOMA对于从每个用户那里获得所需的信道增益测量值作为对基站的反馈也很敏感。
在文献中,为了建立NOMA-V2X架构,NOMA已经与其他技术(如FD)一起被引入。在降低复杂性方面,[118]采用了车辆集群,并讨论了集群头车辆的相对速度和功率分配之间的权衡问题。参考文献[118]提出了一种基于NOMA的功率控制方法来平衡簇头车辆之间的功率分配,从而提高下行链路的吞吐量。在同一方向上,为了解决计算的复杂性问题,[119]提出了一个基于全双工NOMA(FD-NOMA)的分散式V2X系统,显示出随着V2X用户数量的增加,性能得到了改善。作者给出了具有可控误差的近似表达式来解决复杂的计算问题。参考文献[120]提出了一种新颖的联合预编码、用户调度和V2X网络中的NOMA实现,以提高频谱效率,通过使用用户信道向量的中心点,解决了小区中心用户和小区边缘用户之间的不公平频谱效率问题。
对于5G V2X中的广播/多播,[121]除了研究功率分配问题,提出了基于NOMA的半双工和FD中继辅助方法,以最大化所有用户的最低可实现速率。作者使用基于二分法的功率分配算法确保了信道条件差的车辆的服务质量。作为构建NOMA-V2X架构的一部分,[122], [123]提出将NOMA和基于空间重用的D2D的资源共享结合起来,以显著改善网络性能、频谱效率、传输效率和网络吞吐量。参考文献[122]通过创建一个基于加权干扰超图的3维匹配资源分配协议,解决了干扰和资源分配问题。根据[107],NOMA可以帮助提高V2X网络的容量。为了解决NOMA的功率分配问题,该工作[107]提出了一个基于MEC的在线方案、网络切片和深度强化学习。
NOMA允许根据不同的功率水平在同一资源上为多个用户服务。尽管NOMA改善了连接性,减少了延迟,提高了用户的公平性、频谱效率,并增加了可靠性,但必须考虑其他因素,如接收器的复杂性、断电概率、功率分配因素、不完善的SIC和衰减等。
7) MmWave
MmWave是5G使能技术之一,通过提供从30GHz左右到300GHz的更大带宽,即10毫米到1毫米之间的更短波长,窄波束,在满足容量要求方面发挥着重要作用,此外还能提高安全性和减少干扰[124]。尽管这种技术有很多优点,但文献中也讨论了挑战和限制。
当依靠高达800MHz的连续带宽时,毫米波有望提供高达20Gbps的极高数据率。在这些极端的数据速率下,5G NR mmWave技术改善了V2X体验,用于4K/8K视频、增强现实、扩展传感器、自主列队、远程驾驶和高级驾驶等用例。5G mmWave还可以在改善大规模V2X通信场景中蜂窝主接入程序的可靠性方面发挥重要作用[125]。
关于应用于V2X网络的毫米波,[126]提出了一种基于上下文"contextual multi-armed bandits"的在线学习算法,解决了毫米波车辆系统中的波束选择问题。参考文献[127]解释说,为5G V2X部署mmWave的挑战之一是实现波束对准的延迟,提出了确保实现波束对准的优化延迟的波束扫瞄算法和设计。而[128]讨论了mmWave与V2X网络集成时经常发生的这个问题(波束重新调整)。除了考虑到因阻塞而导致的传输中断问题外,作者还为V2X场景提出了一个能量角域初始接入和波束跟踪方案,通过该方案,信号被不同方向的多功率级所标记。参考文献[129]也涉及到了波束对齐的问题,以及由于车辆的快速移动导致的路由稳定性问题。作者介绍了一种基于3D的位置检测方法和一种基于组的路由算法来选择波束排列,此外还定义了一种安全路径以实现可靠的数据传输。对于数据压缩和文件加密,采用了哈夫曼编码和椭圆曲线算法。
考虑到毫米波通信网络中的车辆单元关联问题,[130]提出了一种基于深度强化学习的分布式解决方案,在保证所有车辆的最低服务速率的同时,提高了总和率,从而减少了车辆用户的服务中断。更具体地说,[131]解决了车排系统中的用户(车辆)关联问题。作者提出了基于排队的毫米波V2X网络的空间框架。泊松点过程和多个Matérn硬核过程分别用于模拟基站和分布的车辆。展示了车辆引起的阻塞过程及其与车道数和阻塞车辆高度的关系。提出了三种用户关联技术,以实现排与排和路边单位的通信,此外还确定了理论覆盖的概率[131]。作为研究的结果,排的道路频谱效率比传统的单个车辆要高。参考文献[132]研究了用于V2X通信的毫米波段(22.1-23.1 GHz)的卫星和地面信道特性,考虑了天气条件和两个链接之间的干扰。在分析了诸如接收功率、Rician K因子、均方根延迟传播和角度传播等参数后,研究提供了一些与最大过量衰减、视线和多路径成分的贡献以及小规模物体的影响有关的结果。
MmWave是5G V2X通信的常见候选者,因为先进的V2X用例需要Gbps范围内的高速链接,以获得所需的感官信息,特别是在高水平的自动化方面。然而,由于信号的严重衰减,载波的传输范围仍然有限。
8) FULL-DUPLEX
FULL-DUPLEX是5G的应用技术之一,允许无线电收发机同时传输和接收。FD面临的最重要的挑战是干扰,用于解决这个问题的技术之一是自干扰消除(SIC)[133]。
在文献中,讨论了V2X网络上的几个FD应用。[134]中的结果显示,在车辆上使用FD收发器有助于提高及时性和数据包传输的可靠性。其中,车载FD收发器提高了传感阶段的准确性,改善了资源重新分配过程,并通过使用SIC[134]增强了传输期间的数据包解码/数据包接收能力。在SIC较弱或不完善的情况下,[135]提出了一个在V2X网络中通过能量检测来检测和避免FD碰撞的模型。信道的能量水平被感知,并与基于目标检测的概率、发射器功率、感知时间和SIC系数的特定动态阈值进行比较。正如我们在IV-D6中所讨论的,NOMA与FD相结合,以提供更有效的车辆通信解决方案。FD-NOMA被应用于5G V2X通信中的广播/多播,以改善信道条件差的用户的信息共享、功率分配、公平性和QoS[121]。虽然[121]提出的方案是集中式的,但[119]提出了一个基于FD-NOMA的分散式V2X方案,以适应这种类型的通信要求(URLLC、QoS、V2X设备的数量)。
FD收发器可以成为减少车辆通信系统中端到端延迟的有效而实用的解决方案。然而,FD面临的主要挑战是干扰,因为接收信号的功率比发射信号低得多,此外还有发射器放大器的不完美线性。
9) 人工智能
人工智能已经成为大多数工程研究项目的一个组成部分。在机器人学、数据科学、自然语言处理和博弈论学习等领域,人工智能被应用于设计预测算法。后者是一种有效的数据驱动的方法,可以更严格地处理稀疏和异质的数据。人工智能的方法差别很大,与广泛的领域有关,这些技术的突出例子是启发式方法、蜂群智能、专家系统、进化算法、推理、模糊逻辑、机器学习等[136]-[138]。
带有V2X的人工智能可以实现实时交通流预测和管理、基于位置的应用、自动驾驶交通设施、车辆排队、车辆数据存储和拥堵控制等应用。为了在自动驾驶应用中实现人类驾驶的基本功能,人工智能和V2X一起可以发挥关键作用。然而,盈利和开发人工智能工具以应对V2X挑战仍然是一个处于起步阶段的研究领域[139]。
在[140]中,作者讨论了涉及多个用户的超车安全问题。他们提出了一个基于多个车辆的线性模型的预测规划方法的专家系统。他们的方法在不可预见的情况下,动态地调整机动的路线。参考文献[29]提出了两种人工智能算法,以减少CAPEX和OPEX,解决5G-V2X网络的复杂优化问题。第一种,基于深度学习,旨在准确预测用户和网络流量以减少CAPEX和OPEX。该算法不仅可以预测基于网格的分段的空间和时间数据,还可以预测不规则的分段。第二种算法是基于蜂群智能的,旨在解决与V2X相关的复杂的全局优化问题。后者可以通过基于子群协作的动态自适应布谷鸟搜索,提高布谷鸟搜索的收敛率和优化精度。作者在[141]中提出了一种深度学习算法来优化5G基站分配,用于排查正在行驶的车辆。经过训练的人工智能模型可用于5G-V2X车辆网络的排队管理。最近的一项研究[142]涉及一个新的车辆网络架构,该架构以雾计算为核心支持人工智能。该架构根据车辆网络的具体情况,按比例利用了深度学习智能和雾计算网络架构的优势。作者分析了在拟议的架构中实施深度强化学习的资源分配和任务卸载。此外,他们讨论了采用联邦学习算法来提供可靠的V2V通信。联网车辆和RSU之间的协作改善了道路安全和无信号交叉口的车辆交通管理。[143]的工作研究了人工智能解决方案以及V2X通信技术,以提供基于数据的交叉口管理方法。研究的重点是采用多代理学习方法来管理多个交叉口,以证明所提出的无信号交叉口解决方案的有效性。在[107]中,人工智能在降低复杂性方面的重要性在由资源分配问题导致的具有非凸和非线性数学公式的模型中尤为明显。该研究提出了一种无模型的方法,利用深度强化学习算法使通道资源得到更好的利用。
由于缺乏训练人工智能模型所需的数据,人工智能在V2X通信中的应用仍处于起步阶段,尽管一些政府机构提供了使用ITS技术创建的数据集的权限[17]。这一点在[141]中很明显,其中使用了深度Q网络强化学习方法来训练人工智能模型,实验数据是从网络模拟环境中检索的。传统的/集中的机器学习方案在V2X通信应用中并不总是可行的,主要原因有两个:缺乏对私人数据的访问,以及将这些数据传输到中央实体所需的大量通信开销。[142]中提出的模型的特点是它依赖于分布式/联盟式学习,其中所有的私人数据都保存在其创建的地点,并且只有本地训练的模型被传输到中央实体。因此,这种方法:增强了生成数据的安全性,利用其能力来适应实时/延迟敏感的应用,并且在通信/带宽和能源方面都很高效。这种改进在网络的边缘甚至连接的车辆上带来了额外的开销和复杂性。
人工智能在车辆网络中的应用并不局限于某个特定的网络层。通过已经提出的研究,我们注意到人工智能在整个网络中的应用,其中虚拟化和分片的步伐正在加快。人工智能在网络管理、服务和运营层面以数据驱动的决策支持V2X通信。
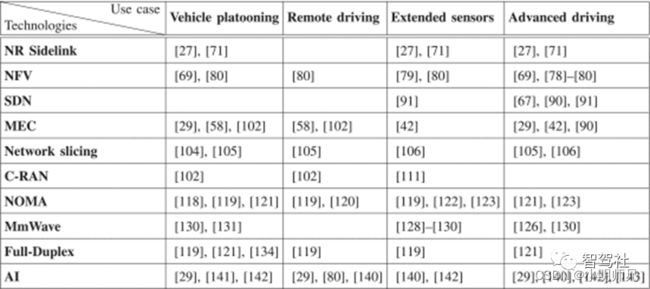
表4提供了V2X用例组内这些使能技术的潜在应用摘要。拟议的映射并不限制其他方面的研究应用,也不一定意味着用例的要求已经完全得到满足,例如对高LoA中用例的要求。
表 4 V2X 用例组和应用技术之间的映射
第五部分:未来的研究方向
通过对5G通信在车辆网络中的应用的文献回顾,可以注意到在车辆背景下利用5G通信方面已经取得了重要进展。但这种进展往往缺乏将所提出的解决方案与标准中所述的具体车辆应用及其要求联系起来。例如,3GPP提供了关于V2X通信的所有既定标准的访问[26], [27]。每个用例的细节,从描述和条件到要求,都在标准组织发布的技术规范中描述。然而,讨论V2X用例的研究却很少。
如本调查所示,5G无线网络将整合许多新兴技术,如大规模MIMO、NR侧链通信、多无线电接入技术、FULL-DUPLEX、毫米波、云/边缘技术和SDN。在这些技术提供解决方案的同时,它们也为基于5G的车辆通信带来了不同的挑战。正如IV-B2中提到的,小蜂窝和空间密集化以及异质网络将在5G中广泛部署。由于频繁的交接,这些结构在提供用户移动性方面面临挑战。关于毫米波,车辆通信面临许多挑战;阴影效应、多普勒扩散、延迟、可靠性、安全性和广播问题。至于大规模MIMO,在没有准确的信道状态信息的情况下,它受到多用户干扰的影响,此外在高移动性的情况下,由于先导污染,SINR和可实现的速率受到限制。
在云计算方面,除了安全、虚拟化管理、VNFs的选择和部署问题外,提供适当的、准确的移动性模型的挑战和资源使用和管理的挑战也不容忽视。车载SDNs在网络管理方面可能面临挑战,因为除了不同的车辆标准和通信技术之间的互操作性有限之外,各种设备和提供的服务的规格也很繁多。另外,车辆网络的高度动态性和异质性导致资源的可用性随时间变化而变化,从而导致服务质量的不稳定。
与边缘计算有关的挑战可以归纳为两个要点,第一是与预取内容的方法有关,车辆的流动性和流量的分布造成了不平衡和不同的停留时间。另一个挑战与后取内容有关,根据车辆、流量和链路容量要求优化内容分配的调度。而网络分片又面临着安全层面的几个挑战,管理分片和提供各行为体之间的信任关系。需要知道网络功能何时应该被集中或被切片,并同时为每个设备创建多个切片。在安全方面,由于各片区的安全服务不同,网络切片会带来安全威胁。最后,由于车辆的高流动性和频谱的异质性,限制了这些资源的可用性,动态频谱共享(如蜂窝状频谱、DSRC和毫米波频谱)受到了挑战。
尽管人工智能(AI)被认为是处理车辆网络中大量数据的关键技术,但AI在V2X系统中的应用仍处于起步阶段。人工智能有可能实时协助许多应用,如交通流管理、基于位置的应用、车辆排队和拥堵控制[139]。随着具有传感器和计算能力的车辆数量的增加,人工智能对加强隐私保护的重要性是显而易见的。从集体的传感器数据中获益,可能会极大地促进V2X应用的丰富,增强其发展。这个概念被称为众筹,它需要激励最大数量的参与者来执行感应任务。在车辆环境的众测中提供一种激励机制,在保护私人信息和最小化数据聚合误差的情况下招募参与者,将是非常重要的。由于在实践中难以获得准确的平台和参与者的传感器模型,借助于机器学习和强化学习是可能的解决方案[144], [145]。在数据源方面, 一些程序, 如ITS DataHub [17], 可能有助于获取一些使用ITS技术创建的数据集, 但数据源仍然稀缺. 一些解决方案依赖于通过网络环境模拟的检索结果来训练提议的方法。而其他方法则依赖于分布式或联合式学习,但这也要求网络边缘的设备具有更大的计算和存储能力。
从研究者的角度来看,车辆通信领域的大部分研究都建立在三个主轴上,即利用更多的频谱资源,增加重复使用这些资源的可能性,最后提高频谱效率。但是,所使用的算法的复杂性、额外的CAPEX和OPEX以及维护等问题阻碍了进一步的发展。在此,我们回过头来提到人工智能的好处,建立有助于发展上述三个轴的算法。
FD它允许无线节点同时进行发射和接收,为车辆通信带来了许多好处。许多研究已经开始开发混合解决方案,将FD与其他技术一起使用,以满足车辆通信需求[119], [121], [133]-[135]。
我们总结了我们对未来研究方向的建议。
- 将研究与标准用例联系起来,或强调缺乏技术规范和其他用例的研究。
- 更好地利用人工智能,无论是建立资源分配算法,促进不同无线电接入技术之间的通信,还是建立混合解决方案和数据处理。
- 将FD作为基础,使频谱效率翻倍,并在动态频谱分配中减少延迟以及可靠性和灵活性,并在5G支持的V2X中启用小单元。
除了目前的用例、应用技术和它们带来的挑战,V2X通信在未来将带来进一步的挑战和研究前景。随着通信设备和V2X应用的大量增加,联网自动驾驶汽车的数量预计将迅速增长,以实现智能自动驾驶汽车。这些应用包括从3D显示、沉浸式娱乐、改进的车载信息娱乐系统到全息控制显示系统[146]-[148]。下一代蜂窝网络(即6G)将面临V2X网络的新的科学和技术挑战。未来的V2X应用将在智能、能源效率、更高的数据速率(如Tbps)、更低的延迟(即低至亚毫秒)和新的隐私/安全问题方面提出更严格的要求。虽然目前的用例一方面讨论车辆之间的通信,另一方面讨论车辆、行人、基础设施和网络之间的通信,但未来的用例将包括非地面通信网络的通信,如卫星通信网络和无人驾驶航空器(UAV)[147]。在这里谈论的是无处不在的智能车辆通信系统,它需要三维覆盖和超快速的无线宽带接入(即连接数十亿的通信设备)[146]-[148]。许多技术和概念正在被研究和开发,以作为下一代通信的基础。其中一些正在开发中,如FD、异构网络、AI和边缘计算,但更广泛和有效的是适合未来V2X应用的卓越计算能力(例如,使用量子计算技术)[146]-[148]。其他技术包括无小区架构和智能反射表面(IRS)[146], [147], [149],它们有助于充分利用传输功率,并确保其到达所有用户。无小区和IRS在受衰减影响的城市车辆环境中非常重要。覆盖的概念在下一代可能会随着全息无线电的出现而完全改变。后者代表了一大组直接、间接和反射路径。这些路径最终可以被想象成连接接入点、设备和反射面的三维幻影。在这种情况下,小区或基站之间不再有交接,因为UE将不断连接到许多接入点。相反,在移动过程中,UE保持与网络的链接并更新它们。最后,跳跃式的太赫兹(THz)通信将使每个用户拥有高达几十GHz的非常宽的带宽,因此有非常高的数据速率[146]-[148]。然而,这些频率的部署受到了挑战,首先是电子元件的开发,然后是在这些高频率下工作的设备和系统。除了伴随着太赫兹部署的物理现象,与低频不同。此外,高功率消耗和无线信号衰减都对这种部署提出了挑战。太赫兹通信适用于短距离V2X通信,并可用于某些用例,其中需要极高的吞吐量和低延迟的通信[147]。
第六节 总结
本文提供了一个关于5G V2X启用技术的概述。介绍了各种V2X用例及其要求。总结了在5G背景下支持V2X通信的技术和解决方案的文献。还映射了V2X应用和5G用例,然后将它们与启用技术联系起来。最后,指出了新兴技术所带来的不同挑战,以及未来在5G支持的V2X中的一些有趣的工作方向。特别是,研究者认为新的和先进的V2X应用可以进一步利用人工智能技术来提高资源利用和V2X能力。此外,FD及其与其他技术(如NOMA)的整合可以在满足新的和先进的车辆通信要求方面发挥重要作用。
本文源自- “On 5G-V2X Use Cases and Enabling Technologies: A Comprehensive Survey” 作者 AHMAD ALALEWI, IYAD DAYOUB, AND SOUMAYA CHERKAOUI
[1] X. Wang, S. Mao, and M. X. Gong, ‘‘An overview of 3GPP cellular vehicle-to-everything standards,’’ GetMobile, Mobile Comput. Commun., vol. 21, no. 3, pp. 19–25, Nov. 2017.
[2] Study on LTE Support for Vehicle-to-Everything (V2X) Services, doc-ument TR 22.885, 3GPP, 2015. [Online]. Available: https://www.3gpp. org/ftp/Specs/archive/22_series/22.885/
[3] J. T. J. Penttinen, ‘‘Services and applications,’’ in 5G Explained: Security and Deployment of Advanced Mobile Communications. Hoboken, NJ, USA: Wiley, 2019, pp. 187–202.
[4] L. Mendiboure, M. A. Chalouf, and F. Krief, ‘‘Towards a 5G vehicu-lar architecture,’’ in Communication Technologies for Vehicles (Lecture Notes in Computer Science), B. Hilt, M. Berbineau, A. Vinel, M. Jonsson, and A. Pirovano, Eds. Cham, Switzerland: Springer, 2019, pp. 3–15.
[5] O. Kaiwartya, A. H. Abdullah, Y. Cao, A. Altameem, M. Prasad, C.-T. Lin, and X. Liu, ‘‘Internet of vehicles: Motivation, layered archi-tecture, network model, challenges, and future aspects,’’ IEEE Access, vol. 4, pp. 5356–5373, 2016.
[6] R. Molina-Masegosa, J. Gozalvez, and M. Sepulcre, ‘‘Comparison of IEEE 802.11p and LTE-V2X: An evaluation with periodic and ape-riodic messages of constant and variable size,’’ IEEE Access, vol. 8, pp. 121526–121548, 2020.
[7] G. Naik, B. Choudhury, and J.-M. Park, ‘‘IEEE 802.11bd & 5G NR V2X: Evolution of radio access technologies for V2X communications,’’ IEEE Access, vol. 7, pp. 70169–70184, 2019.
[8] H. Zhou, W. Xu, J. Chen, and W. Wang, ‘‘Evolutionary V2X technologies toward the internet of vehicles: Challenges and opportunities,’’ Proc. IEEE, vol. 108, no. 2, pp. 308–323, Feb. 2020.
[9] Z. MacHardy, A. Khan, K. Obana, and S. Iwashina, ‘‘V2X access tech-nologies: Regulation, research, and remaining challenges,’’ IEEE Com-mun. Surveys Tuts., vol. 20, no. 3, pp. 1858–1877, 3rd Quart., 2018.
[10] C. R. Storck and F. Duarte-Figueiredo, ‘‘A survey of 5G technol-ogy evolution, standards, and infrastructure associated with vehicle-to-everything communications by internet of vehicles,’’ IEEE Access, vol. 8, pp. 117593–117614, 2020.
[11] S. Gyawali, S. Xu, Y. Qian, and R. Q. Hu, ‘‘Challenges and solutions for cellular based V2X communications,’’ IEEE Commun. Surveys Tuts., vol. 23, no. 1, pp. 222–255, 1st Quart., 2021.
[12] H. Hartenstein and L. P. Laberteaux, ‘‘A tutorial survey on vehicular ad hoc networks,’’ IEEE Commun. Mag., vol. 46, no. 6, pp. 164–171, Jun. 2008.
[13] S. Tsugawa, ‘‘Inter-vehicle communications and their applications to intelligent vehicles: An overview,’’ in Proc. IEEE Intell. Vehicle Symp., vol. 2, Jun. 2002, pp. 564–569.
[14] M. Williams, ‘‘PROMETHEUS—The European research programme for optimising the road transport system in Europe,’’ in Proc. IEE Colloq. Driver Inf., Dec. 1988, pp. 1-1–1-9.
[15] M. L. Sichitiu and M. Kihl, ‘‘Inter-vehicle communication systems: A sur-vey,’’ IEEE Commun. Surveys Tuts., vol. 10, no. 2, pp. 88–105, Jul. 2008.
[16] S. Sharma and B. Kaushik, ‘‘A survey on internet of vehicles: Applica-tions, security issues & solutions,’’ Veh. Commun., vol. 20, Dec. 2019, Art. no. 100182.
[17] Connected Vehicle Deployer Resources—ITS Professional Capacity Building Program. Accessed: Mar. 4, 2021. [Online]. Available: https://www.pcb.its.dot.gov/CV_deployer_resources.aspx
[18] About Us—CAR 2 CAR Communication Consortium. Accessed: Mar. 4, 2021. [Online]. Available: https://www.car-2-car.org/about-us/
[19] SIP-Adus Automated Driving for Universal Service. Accessed: Mar. 8, 2021. [Online]. Available: https://en.sip-adus.go.jp
[20] ITS Info-Communications: Forum About Forum. Accessed: Mar. 8, 2021. [Online]. Available: https://itsforum.gr.jp/Public/E1Purpose/P02/P02.html
[21] Service Requirements for V2X Services, document TS 22.185, 3GPP, 2018.
[22] LTE; Service Requirements for V2X Services, document TS 22.185 Ver-sion 15.0.0 Release 15, ETSI, Sophia Antipolis, France, Jul. 2018.
[23] L. Gao, Y. Li, J. Misener, and S. Patil, ‘‘C-V2X based basic safety related ITS spectrum requirement analysis,’’ in Proc. IEEE 86th Veh. Technol. Conf. (VTC-Fall), Sep. 2017, pp. 1–5.
[24] 5GAA, Germany. (Jun. 2019). C-V2X Use Cases: Methodology, Examples and Service Level Requirements White Paper. [Online]. Avail-able: https://5gaa.org/wp-content/uploads/2019/07/5GAA_191906_ WP_CV2X_UCs_v1.pdf
[25] A. E. Fernandez, M. Fallgren, and N. Brahmi, ‘‘5GCAR scenarios, use cases, requirements and KPIs,’’ 5GCAR, Germany, Tech. Rep. 5GCAR/D2.1, Feb. 2019.
[26] Technical Specification Group Services and System Aspects; Study on Enhancement of 3GPP Support for 5G V2X Services (Release
16) , document TR 22.886, 3GPP, Dec. 2018. [Online]. Available: https://www.3gpp.org/ftp/Specs/archive/22_series/22.886/
[27] Technical Specification Group Radio Access Network; NR; Study on NR Vehicle-to-Everything (V2X) (Release 16), document TR 38.885, 3GPP, Mar. 2019. [Online]. Available: https://www.3gpp.org/ftp/Specs/archive/38_series/38.885/
[28] P. Wang, B. Di, H. Zhang, K. Bian, and L. Song, ‘‘Platoon cooperation in cellular V2X networks for 5G and beyond,’’ IEEE Trans. Wireless Commun., vol. 18, no. 8, pp. 3919–3932, Aug. 2019.
[29] H. Ma, S. Li, E. Zhang, Z. Lv, J. Hu, and X. Wei, ‘‘Cooperative autonomous driving oriented MEC-aided 5G-V2X: Prototype system design, field tests and AI-based optimization tools,’’ IEEE Access, vol. 8, pp. 54288–54302, 2020.
[30] M. T. Barros, G. Velez, H. Arregui, E. Loyo, K. Sharma, A. Mujika, and B. Jennings, ‘‘CogITS: Cognition-enabled network management for 5G V2X communication,’’ IET Intell. Transp. Syst., vol. 14, no. 3, pp. 182–189, Mar. 2020.
[31] Z. Ying, M. Ma, and L. Yi, ‘‘BAVPM: Practical autonomous vehicle platoon management supported by blockchain technique,’’ in Proc. 4th Int. Conf. Intell. Transp. Eng. (ICITE), Sep. 2019, pp. 256–260.
[32] R. Alieiev, A. Kwoczek, and T. Hehn, ‘‘Automotive requirements for future mobile networks,’’ in Proc. IEEE MTT-S Int. Conf. Microw. Intell. Mobility (ICMIM), Apr. 2015, pp. 1–4.
[33] R. Möller, K. Barboutov, A. Furuskär, R. Inam, P. Lindberg, K. Öhman,
J. Sachs, R. Sveningsson, J. Torsner, K. Wallstedt, and V. Gully, ‘‘Eric-sson mobility report June 2017,’’ Ericsson, Stockholm, Sweden, Tech. Rep., Jun. 2017.
[34] U. Saeed, J. Hamalainen, M. Garcia-Lozano, and G. D. González, ‘‘On the feasibility of remote driving application over dense 5G roadside networks,’’ in Proc. 16th Int. Symp. Wireless Commun. Syst. (ISWCS), Aug. 2019, pp. 271–276.
[35] Intelligent Transport Systems—Co-Operative ITS—Local Dynamic Map, Standard ISO 18750:2018, ISO, 2018.
[36] Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Local Dynamic Map (LDM) Concept for Local Dynamic Maps, Standard ETSI EN 302 895 V1.1.1, European Telecom-munications Standards Institute, Sep. 2014.
[37] I. C. D. Doig, J. R. W. Lepp, S. McCann, M. P. Montemurro, and S. J. Barrett, ‘‘Method and system for hybrid collective perception and map crowdsourcing,’’ U.S. Patent 2019 0 339 082 A1, Nov. 7, 2019.
[38] F. A. Schiegg, N. Brahmi, and I. Llatser, ‘‘Analytical performance eval-uation of the collective perception service in C-V2X mode 4 networks,’’ in Proc. IEEE Intell. Transp. Syst. Conf. (ITSC), Oct. 2019, pp. 181–188.
[39] M. Herbert, A. Váradi, and L. Bokor, ‘‘Modelling and examination of collective perception service for V2X supported autonomous driving,’’ in Proc. 11th Int. Conf. Appl. Informat., vol. 2650, Jan. 2020, p. 12.
[40] B. Gouse, J. Klei, K. Stepper, and D. Zuby, ‘‘Self-driving cars: Levels of automation,’’ in Proc. Congr. House Committee Energy Commerce. Washington, DC, USA: U.S. Government Publishing Office, Mar. 2017,
p. 109.
[41] M. Gharba, H. Cao, S. Gangakhedkar, J. Eichinger, A. R. Ali, K. Ganesan,
V. Jain, S. Lapoehn, T. Frankiewicz, T. Hesse, Y. Zou, C. Tang, and L. Gu, ‘‘5G enabled cooperative collision avoidance: System design and field test,’’in Proc. IEEE Int. Symp. World Wireless, Mobile Multimedia Netw.(WoWMoM), Jun. 2017, pp. 1–6.
[42] L. Ding, Y. Wang, P. Wu, L. Li, and J. Zhang, ‘‘Kinematic information aided user-centric 5G vehicular networks in support of cooperative per-ception for automated driving,’’ IEEE Access, vol. 7, pp. 40195–40209, 2019.
[43] J. Lianghai, A. Weinand, B. Han, and H. D. Schotten, ‘‘Applying mul-tiradio access technologies for reliability enhancement in vehicle-to-everything communication,’’ IEEE Access, vol. 6, pp. 23079–23094, 2018.
[44] K. Z. Ghafoor, M. Guizani, L. Kong, H. S. Maghdid, and K. F. Jasim, ‘‘Enabling efficient coexistence of DSRC and C-V2X in vehicular net-works,’’ IEEE Wireless Commun., vol. 27, no. 2, pp. 134–140, Apr. 2020.
[45] Z. H. Mir, J. Toutouh, F. Filali, and Y.-B. Ko, ‘‘Enabling DSRC and
C- V2X integrated hybrid vehicular networks: Architecture and protocol,’’ IEEE Access, vol. 8, pp. 180909–180927, 2020.
[46] W. Anwar, N. Franchi, and G. Fettweis, ‘‘Physical layer evaluation of V2X communications technologies: 5G NR-V2X, LTE-V2X, IEEE 802.11bd, and IEEE 802.11p,’’ in Proc. IEEE 90th Veh. Technol. Conf.(VTC-Fall), Sep. 2019, pp. 1–7.
[47] R. Kaur, R. K. Ramachandran, R. Doss, and L. Pan, ‘‘The importance of selecting clustering parameters in VANETs: A survey,’’ Comput. Sci. Rev., vol. 40, May 2021, Art. no. 100392.
[48] A. Triwinarko, I. Dayoub, M. Zwingelstein-Colin, M. Gharbi, and
B. Bouraoui, ‘‘A PHY/MAC cross-layer design with transmit antenna selection and power adaptation for receiver blocking problem in dense VANETs,’’ Veh. Commun., vol. 24, Aug. 2020, Art. no. 100233.
[49] R. Amin, I. Pali, and V. Sureshkumar, ‘‘Software-defined network enabled vehicle to vehicle secured data transmission protocol in VANETs,’’ J. Inf. Secur. Appl., vol. 58, May 2021, Art. no. 102729.
[50] P. Popovski, K. F. Trillingsgaard, O. Simeone, and G. Durisi, ‘‘5G wire-less network slicing for eMBB, URLLC, and mMTC: A communication-theoretic view,’’ IEEE Access, vol. 6, pp. 55765–55779, 2018.
[51] C. Storck and F. Duarte-Figueiredo, ‘‘A 5G V2X ecosystem providing internet of vehicles,’’ Sensors, vol. 19, no. 3, p. 550, Jan. 2019.
[52] H. Bagheri, M. Noor-A-Rahim, Z. Liu, H. Lee, D. Pesch, K. Moessner, and P. Xiao, ‘‘5G NR-V2X: Towards connected and cooperative autonomous driving,’’ Sep. 2020, arXiv:2009.03638. [Online]. Available: http://arxiv.org/abs/2009.03638
[53] H. Khan, P. Luoto, S. Samarakoon, M. Bennis, and M. Latva-Aho, ‘‘Net-work slicing for vehicular communication,’’ Trans. Emerg. Telecommun. Technol., vol. 32, no. 1, p. e3652, May 2019.
[54] H. D. R. Albonda and J. Pérez-Romero, ‘‘An efficient RAN slicing strategy for a heterogeneous network with eMBB and V2X services,’’ IEEE Access, vol. 7, pp. 44771–44782, 2019.
[55] M. C. Lucas-Estañ, J. Gozalvez, and M. Sepulcre, ‘‘On the capacity of 5G NR grant-free scheduling with shared radio resources to support ultra-reliable and low-latency communications,’’ Sensors, vol. 19, no. 16,
p. 3575, Aug. 2019.
[56] A. Ghosh, A. Maeder, M. Baker, and D. Chandramouli, ‘‘5G evolution: A view on 5G cellular technology beyond 3GPP release 15,’’ IEEE Access, vol. 7, pp. 127639–127651, 2019.
[57] G. Ghatak, ‘‘Cooperative relaying for URLLC in V2X networks,’’ IEEE Wireless Commun. Lett., vol. 10, no. 1, pp. 97–101, Jan. 2021.
[58] L. Feng, W. Li, Y. Lin, L. Zhu, S. Guo, and Z. Zhen, ‘‘Joint computa-tion offloading and URLLC resource allocation for collaborative MEC assisted cellular-V2X networks,’’IEEE Access, vol. 8, pp. 24914–24926, 2020.
[59] A. Ghosh, R. Ratasuk, and F. Vook, ‘‘NR radio interface for 5G verticals,’’ in 5G Verticals. Hoboken, NJ, USA: Wiley, 2020, pp. 57–91.
[60] N. Al-Falahy and O. Y. K. Alani, ‘‘Millimetre wave frequency band as a candidate spectrum for 5G network architecture: A survey,’’ Phys. Commun., vol. 32, pp. 120–144, Feb. 2019.
[61] A. Morgado, K. M. S. Huq, S. Mumtaz, and J. Rodriguez, ‘‘A survey of 5G technologies: Regulatory, standardization and industrial perspectives,’’ Digit. Commun. Netw., vol. 4, no. 2, pp. 87–97, Apr. 2018.
[62] R. Jacob, N. Franchi, and G. Fettweis, ‘‘Hybrid V2X communications: Multi-RAT as enabler for connected autonomous driving,’’ in Proc. IEEE 29th Annu. Int. Symp. Pers., Indoor Mobile Radio Commun. (PIMRC), Sep. 2018, pp. 1370–1376.
[63] P. Wang, B. Di, H. Zhang, K. Bian, and L. Song, ‘‘Cellular V2X communications in unlicensed spectrum: Harmonious coexistence with VANET in 5G systems,’’ IEEE Trans. Wireless Commun., vol. 17, no. 8, pp. 5212–5224, Aug. 2018.
[64] Q. Wei, L. Wang, Z. Feng, and Z. Ding, ‘‘Wireless resource management in LTE-U driven heterogeneous V2X communication networks,’’ IEEE Trans. Veh. Technol., vol. 67, no. 8, pp. 7508–7522, Aug. 2018.
[65] E. D. N. Ndih, S. Cherkaoui, and I. Dayoub, ‘‘Analytic modeling of the coexistence of IEEE 802.15.4 and IEEE 802.11 in saturation conditions,’’ IEEE Commun. Lett., vol. 19, no. 11, pp. 1981–1984, Nov. 2015.
[66] F. Al-Turjman, E. Ever, and H. Zahmatkesh, ‘‘Small cells in the forthcoming 5G/IoT: Traffic modelling and deployment overview,’’ IEEE Commun. Surveys Tuts., vol. 21, no. 1, pp. 28–65, 1st Quart., 2019.
[67] S. K. Tayyaba, H. A. Khattak, A. Almogren, M. A. Shah, I. U. Din,
I. Alkhalifa, and M. Guizani, ‘‘5G vehicular network resource man-agement for improving radio access through machine learning,’’ IEEE Access, vol. 8, pp. 6792–6800, 2020.
[68] Network Policy Management for Mobile Networks Based on Network Function Virtualization (NFV) Scenarios, document TS 28.311, 3GPP, Dec. 2019. [Online]. Available: https://www.3gpp.org/ftp/Specs/archive/28_series/28.311/
[69] Y. Han, X. Tao, X. Zhang, and S. Jia, ‘‘Average service time analysis of a clustered VNF chaining scheme in NFV-based V2X networks,’’ IEEE Access, vol. 6, pp. 73232–73244, 2018.
[70] Technical Specification Group Services and System Aspects; Enhance-ment of 3GPP Support for V2X Scenarios, document TS 22.186, 3GPP, Jun. 2019. [Online]. Available: https://www.3gpp.org/ftp/Specs/archive/22_series/22.186/
[71] S.-Y. Lien, D.-J. Deng, C.-C. Lin, H.-L. Tsai, T. Chen, C. Guo, and S.-M. Cheng, ‘‘3GPP NR sidelink transmissions toward 5G V2X,’’ IEEE Access, vol. 8, pp. 35368–35382, 2020.
[72] 5GAA V2X Terms and Definitions, document TR A-170188, 5GAA, 2017. [Online]. Available: https://5gaa.org/wp-content/uploads/ 2017/08/5GAA-V2X-Terms-and-Definitions110917.pdf
[73] R. Mijumbi, J. Serrat, J.-L. Gorricho, N. Bouten, F. De Turck, and R. Boutaba, ‘‘Network function virtualization: State-of-the-art and research challenges,’’ IEEE Commun. Surveys Tuts., vol. 18, no. 1, pp. 236–262, 1st Quart., 2016.
[74] Network Function Virtualisation (NFV); Management and Orchestra-tion; Report on Policy Management in MANO; Release 3, ETSI, Sophia Antipolis, France, July 2017.
[75] 5G-PPP. (Jan. 2017). Vision on Software Networks and 5G.[Online]. Available: https://5g-ppp.eu/wp-content/uploads/2014/02/5G-PPP_SoftNets_WG_whitepaper_v20.pdf
[76] ETSI. (2020). ETSI—Standards for NFV—Network Func-tions Virtualisation | NFV Solutions. [Online]. Available: https://www.etsi.org/technologies/nfv
[77] W. Pak, ‘‘Fast packet classification for V2X services in 5G networks,’’
J. Commun. Netw., vol. 19, no. 3, pp. 218–226, 2017.
[78] R. Torre, G. Peralta, O. Zhdanenko, A. Kropp, H. Salah, G. T. Nguyen,
S. Mudriievskyi, and F. H. P. Frank, ‘‘Enhanced driving with 5G: A new approach for alleviating traffic congestion,’’ in Proc. IEEE Conf. Netw. Function Virtualization Softw. Defined Netw. (NFV-SDN), Nov. 2019, pp. 1–2.
[79] J. Wang, B. He, J. Wang, and T. Li, ‘‘Intelligent VNFs selection based on traffic identification in vehicular cloud networks,’’ IEEE Trans. Veh. Technol., vol. 68, no. 5, pp. 4140–4147, May 2019.
[80] N. Xie and J. Luo, ‘‘Resources allocation at the physical layer for network function virtualization deployment,’’ IEEE Trans. Veh. Technol., vol. 69, no. 3, pp. 2771–2784, Mar. 2020.
[81] S. Cheruvu, A. Kumar, N. Smith, and D. M. Wheeler, ‘‘Connectivity technologies for IoT,’’ in Demystifying Internet of Things Security: Suc-cessful IoT Device/Edge and Platform Security Deployment, S. Cheruvu,
A. Kumar, N. Smith, and D. M. Wheeler, Eds. Berkeley, CA, USA: Apress, 2020, pp. 347–411.
[82] K. Benzekki, A. El Fergougui, and A. E. Elalaoui, ‘‘Software-defined networking (SDN): A survey,’’ Secur. Commun. Netw., vol. 9, no. 18, pp. 5803–5833, 2016.
[83] H. Li, M. Dong, and K. Ota, ‘‘Control plane optimization in software-defined vehicular ad hoc networks,’’ IEEE Trans. Veh. Technol., vol. 65, no. 10, pp. 7895–7904, Oct. 2016.
[84] L. Nkenyereye, L. Nkenyereye, S. M. R. Islam, Y.-H. Choi, M. Bilal, and J.-W. Jang, ‘‘Software-defined network-based vehicular networks: A position paper on their modeling and implementation,’’ Sensors, vol. 19, no. 17, p. 3788, Aug. 2019.
[85] P. Dhawankar, M. Raza, H. Le-Minh, and N. Aslam, ‘‘Software-defined approach for communication in autonomous transportation systems,’’ EAI Endorsed Trans. Energy Web, vol. 4, no. 12, Jul. 2017, Art. no. 152924.
[86] B. Isyaku, M. S. M. Zahid, M. B. Kamat, K. A. Bakar, and F. A. Ghaleb, ‘‘Software defined networking flow table management of OpenFlow switches performance and security challenges: A survey,’’ Future Inter-net, vol. 12, no. 9, p. 147, Aug. 2020.
[87] D. E. Sarmiento, A. Lebre, L. Nussbaum, and A. Chari, ‘‘Decentral-ized SDN control plane for a distributed cloud-edge infrastructure: A survey,’’ IEEE Commun. Surveys Tuts., vol. 23, no. 1, pp. 256–281, 1st Quart., 2021.
[88] N. B. Truong, G. M. Lee, and Y. Ghamri-Doudane, ‘‘Software defined networking-based vehicular adhoc network with fog computing,’’ in Proc. IFIP/IEEE Int. Symp. Integr. Netw. Manag. (IM), May 2015, pp. 1202–1207.
[89] K. L. K. Sudheera, M. Ma, G. G. M. N. Ali, and P. H. J. Chong, ‘‘Delay efficient software defined networking based architecture for vehicular networks,’’ in Proc. IEEE Int. Conf. Commun. Syst. (ICCS), Dec. 2016, pp. 1–6.
[90] X. Ge, Z. Li, and S. Li, ‘‘5G software defined vehicular networks,’’IEEE Commun. Mag., vol. 55, no. 7, pp. 87–93, Jul. 2017.
[91] Y. Zhang, M. Chen, N. Guizani, D. Wu, and V. C. Leung, ‘‘SOVCAN: Safety-oriented vehicular controller area network,’’ IEEE Commun. Mag., vol. 55, no. 8, pp. 94–99, Aug. 2017.
[92] O. Sadio, I. Ngom, and C. Lishou, ‘‘Design and prototyping of a software defined vehicular networking,’’ IEEE Trans. Veh. Technol., vol. 69, no. 1, pp. 842–850, Jan. 2020.
[93] J. Feng, Z. Liu, C. Wu, and Y. Ji, ‘‘AVE: Autonomous vehicular edge computing framework with ACO-based scheduling,’’ IEEE Trans. Veh. Technol., vol. 66, no. 12, pp. 10660–10675, Dec. 2017.
[94] Multi-Access Edge Computing (MEC); Study on MEC Support for V2X Use Cases, document GR MEC 022 V2.1.1, ETSI Industry Specifica-tion Group, Sophia Antipolis, France, Sep. 2018. [Online]. Available: https://www.etsi.org/deliver/etsi_gr/mec/001_099/022/02.01.01_60/
[95] Multi-Access Edge Computing (MEC); V2X Information Service API, Standard GS MEC 030 V2.1.1, ETSI Industry Specification Group, Sophia Antipolis, France, Apr. 2020. [Online]. Available: https://www.etsi.org/deliver/etsi_gs/MEC/001_099/030/02.01.01_60/
[96] ETSI. (2021). MEC Proofs of Concept. [Online]. Available: https://www.etsi.org/technologies/multi-access-edge-computing/mec-poc
[97] Z. Ning, P. Dong, X. Wang, J. J. Rodrigues, and F. Xia, ‘‘Deep reinforce-ment learning for vehicular edge computing: An intelligent offloading system,’’ ACM Trans. Intell. Syst. Technol., vol. 10, no. 6, pp. 60:1–60:24, Oct. 2019.
[98] L. Liu, C. Chen, Q. Pei, S. Maharjan, and Y. Zhang, ‘‘Vehicular edge computing and networking: A survey,’’ Mobile Netw. Appl., vol. 26, no. 3, pp. 1145–1168, Jul. 2020.
[99] J. Kang, R. Yu, X. Huang, M. Wu, S. Maharjan, S. Xie, and Y. Zhang, ‘‘Blockchain for secure and efficient data sharing in vehicular edge computing and networks,’’ IEEE Internet Things J., vol. 6, no. 3, pp. 4660–4670, Jun. 2019.
[100] K. Zhang, Y. Mao, S. Leng, S. Maharjan, and Y. Zhang, ‘‘Optimal delay constrained offloading for vehicular edge computing networks,’’ in Proc. IEEE 17th Int. Conf. Communs. (ICC), May 2017, pp. 1–6.
[101] S. Raza, S. Wang, M. Ahmed, and M. R. Anwar, ‘‘Corrigendum to ‘a survey on vehicular edge computing: Architecture, applications, techni-cal issues, and future directions,’’’ Wireless Commun. Mobile Comput., vol. 2019, Jul. 2019, Art. no. e6104671.
[102] F. Tonini, B. Khorsandi, E. Amato, and C. Raffaelli, ‘‘Scalable edge computing deployment for reliable service provisioning in vehicular net-works,’’ J. Sensor Actuator Netw., vol. 8, no. 4, p. 51, Oct. 2019.
[103] J. Ordonez-Lucena, P. Ameigeiras, D. Lopez, J. J. Ramos-Munoz,
J. Lorca, and J. Folgueira, ‘‘Network slicing for 5G with SDN/NFV: Concepts, architectures, and challenges,’’ IEEE Commun. Mag., vol. 55, no. 5, pp. 80–87, May 2017.
[104] K. Xiong, S. Leng, J. Hu, X. Chen, and K. Yang, ‘‘Smart network slicing for vehicular fog-RANs,’’ IEEE Trans. Veh. Technol., vol. 68, no. 4, pp. 3075–3085, Apr. 2019.
[105] X. Ge, ‘‘Ultra-reliable low-latency communications in autonomous vehic-ular networks,’’ IEEE Trans. Veh. Technol., vol. 68, no. 5, pp. 5005–5016, May 2019.
[106] S. Zhang, W. Quan, J. Li, W. Shi, P. Yang, and X. Shen, ‘‘Air-ground integrated vehicular network slicing with content pushing and caching,’’ IEEE J. Sel. Areas Commun., vol. 36, no. 9, pp. 2114–2127, Sep. 2018.
[107] Z. Mlika and S. Cherkaoui, ‘‘Network slicing with MEC and deep rein-forcement learning for the internet of vehicles,’’ IEEE Netw., vol. 35, no. 3, pp. 132–138, May/Jun. 2021.
[108] T. Sahin, M. Klugel, C. Zhou, and W. Kellerer, ‘‘Virtual cells for 5G V2X communications,’’ IEEE Commun. Standards Mag., vol. 2, no. 1, pp. 22–28, Mar. 2018.
[109] A. Checko, H. L. Christiansen, Y. Yan, L. Scolari, G. Kardaras,
M. S. Berger, and L. Dittmann, ‘‘Cloud RAN for mobile networks—A technology overview,’’ IEEE Commun. Surveys Tuts., vol. 17, no. 1, pp. 405–426, 1st Quart., 2015.
[110] J. Tang, B. Shim, and T. Q. S. Quek, ‘‘Service multiplexing and revenue maximization in sliced C-RAN incorporated with URLLC and multicast eMBB,’’ IEEE J. Sel. Areas Commun., vol. 37, no. 4, pp. 881–895, Apr. 2019.
[111] Y. Su, X. Lu, L. Huang, X. Du, and M. Guizani, ‘‘A novel DCT-based compression scheme for 5G vehicular networks,’’ IEEE Trans. Veh. Tech-nol., vol. 68, no. 11, pp. 10872–10881, Nov. 2019.
[112] M. Vaezi, R. Schober, Z. Ding, and H. V. Poor, ‘‘Non-orthogonal multiple access: Common myths and critical questions,’’ IEEE Wireless Commun., vol. 26, no. 5, pp. 174–180, Oct. 2019.
[113] Z. Ding, Y. Liu, J. Choi, Q. Sun, M. Elkashlan, C.-L. I, and H. V. Poor, ‘‘Application of non-orthogonal multiple access in LTE and 5G net-works,’’ IEEE Commun. Mag., vol. 55, no. 2, pp. 185–191, Feb. 2017.
[114] M. Saideh, Y. Alsaba, I. Dayoub, and M. Berbineau, ‘‘Joint interference cancellation for multi-carrier modulation-based non-orthogonal multiple access,’’ IEEE Commun. Lett., vol. 23, no. 11, pp. 2114–2117, Nov. 2019.
[115] L. Luo, Q. Li, and J. Cheng, ‘‘Performance analysis of overlay cognitive NOMA systems with imperfect successive interference cancellation,’’ IEEE Trans. Commun., vol. 68, no. 8, pp. 4709–4722, Aug. 2020.
[116] I. A. Mahady, E. Bedeer, S. Ikki, and H. Yanikomeroglu, ‘‘Sum-rate maximization of NOMA systems under imperfect successive interfer-ence cancellation,’’ IEEE Commun. Lett., vol. 23, no. 3, pp. 474–477, Mar. 2019.
[117] B. Di, L. Song, Y. Li, and G. Y. Li, ‘‘Non-orthogonal multiple access for high-reliable and low-latency V2X communications in 5G systems,’’ IEEE J. Sel. Areas Commun., vol. 35, no. 10, pp. 2383–2397, Oct. 2017.
[118] H. Xiao, Y. Chen, S. Ouyang, and A. T. Chronopoulos, ‘‘Power con-trol for clustering car-following V2X communication system with non-orthogonal multiple access,’’ IEEE Access, vol. 7, pp. 68160–68171, May 2019.
[119] D. Zhang, Y. Liu, L. Dai, A. K. Bashir, A. Nallanathan, and B. Shim, ‘‘Performance analysis of decentralized V2X system with FD-NOMA,’’ in Proc. IEEE 90th Veh. Technol. Conf. (VTC-Fall), Sep. 2019, pp. 1–6.
[120] B. Wang, R. Shi, C. Ji, and J. Hu, ‘‘Joint precoding and user scheduling for full-duplex cooperative MIMO-NOMA V2X networks,’’ in Proc. IEEE 90th Veh. Technol. Conf. (VTC-Fall), Sep. 2019, pp. 1–6.
[121] G. Liu, Z. Wang, J. Hu, Z. Ding, and P. Fan, ‘‘Cooperative NOMA broad-casting/multicasting for low-latency and high-reliability 5G cellular V2X communications,’’ IEEE Internet Things J., vol. 6, no. 5, pp. 7828–7838, Oct. 2019.
[122] B. Wang, R. Zhang, C. Chen, X. Cheng, L. Yang, and Y. Jin, ‘‘Interference hypergraph-based 3D matching resource allocation protocol for NOMA-V2X networks,’’ IEEE Access, vol. 7, pp. 90789–90800, 2019.
[123] C. Chen, B. Wang, and R. Zhang, ‘‘Interference hypergraph-based resource allocation (IHG-RA) for NOMA-integrated V2X networks,’’ IEEE Internet Things J., vol. 6, no. 1, pp. 161–170, Feb. 2019.
[124] L. Zhang, H. Zhao, S. Hou, Z. Zhao, H. Xu, X. Wu, Q. Wu, and R. Zhang, ‘‘A survey on 5G millimeter wave communications for UAV-assisted wireless networks,’’ IEEE Access, vol. 7, pp. 117460–117504, 2019.
[125] A. Orsino, O. Galinina, S. Andreev, O. N. C. Yilmaz, T. Tirronen,
J. Torsner, and Y. Koucheryavy, ‘‘Improving initial access reliability of 5G mmWave cellular in massive V2X communications scenarios,’’ in Proc. IEEE Int. Conf. Commun. (ICC), May 2018, pp. 1–7.
[126] G. H. Sim, S. Klos, A. Asadi, A. Klein, and M. Hollick, ‘‘An online context-aware machine learning algorithm for 5G mmWave vehic-ular communications,’’ IEEE/ACM Trans. Netw., vol. 26, no. 6, pp. 2487–2500, Dec. 2018.
[127] S. Lien, Y.-C. Kuo, D.-J. Deng, H.-L. Tsai, A. Vinel, and A. Benslimane, ‘‘Latency-optimal mmWave radio access for V2X supporting next gener-ation driving use cases,’’ IEEE Access, vol. 7, pp. 6782–6795, Dec. 2018.
[128] S. Huang, Y. Gao, W. Xu, Y. Gao, and Z. Feng, ‘‘Energy-angle domain ini-tial access and beam tracking in millimeter wave V2X communications,’’ IEEE Access, vol. 7, pp. 9340–9350, Jan. 2019.
[129] I. Rasheed, F. Hu, Y.-K. Hong, and B. Balasubramanian, ‘‘Intelligent vehicle network routing with adaptive 3D beam alignment for mmWave 5G-based V2X communications,’’ IEEE Trans. Intell. Transp. Syst., vol. 22, no. 5, pp. 2706–2718, May 2020.
[130] H. Khan, A. Elgabli, S. Samarakoon, M. Bennis, and C. S. Hong, ‘‘Rein-forcement learning-based vehicle-cell association algorithm for highly mobile millimeter wave communication,’’ IEEE Trans. Cognit. Commun. Netw., vol. 5, no. 4, pp. 1073–1085, Dec. 2019.
[131] W. Yi, Y. Liu, Y. Deng, A. Nallanathan, and R. W. Heath, Jr., ‘‘Modeling and analysis of mmWave V2X networks with vehicular platoon systems,’’ IEEE J. Sel. Areas Commun., vol. 37, no. 12, pp. 2851–2866, 2019.
[132] D. Yan, H. Yi, D. He, K. Guan, B. Ai, Z. Zhong, J. Kim, and
H. Chung, ‘‘Channel characterization for satellite link and terrestrial link of vehicular communication in the mmWave band,’’ IEEE Access, vol. 7, pp. 173559–173570, 2019.
[133] M. A. Abu-Rgheff, ‘‘5G enabling technologies: Small cells, full-duplex communications, and full-dimension MIMO technologies,’’ in 5G Phys-ical Layer Technologies. Hoboken, NJ, USA: Wiley, 2019, pp. 43–98.
[134] C. Campolo, A. Molinaro, F. Romeo, A. Bazzi, and A. O. Berthet, ‘‘Full duplex-aided sensing and scheduling in cellular-V2X mode 4,’’ in Proc. 1st ACM MobiHoc Workshop Technol., Models, Protocols Cooperat. Connected Cars (TOP-Cars). Catania, Italy: Association for Computing Machinery, Jul. 2019, pp. 19–24.
[135] J. Zang, V. Towhidlou, and M. Shikh-Bahaei, ‘‘Collision avoidance in V2X communication networks,’’ in Proc. IEEE Wireless Commun. Netw. Conf. Workshop (WCNCW), Apr. 2019, pp. 1–6.
[136] V. Kotu and B. Deshpande, ‘‘Introduction,’’ in Data Science, V. Kotu and
B. Deshpande, Eds., 2nd ed. San Mateo, CA, USA: Morgan Kaufmann, Jan. 2019, ch. 1, pp. 1–18.
[137] R. Kern, T. Al-Ubaidi, V. Sabol, S. Krebs, M. Khodachenko, and M. Scherf, ‘‘Astro- and geoinformatics—Visually guided classification of time series data,’’in Knowledge Discovery in Big Data From Astron-omy and Earth Observation, P. Škoda and F. Adam, Eds. Amsterdam, The Netherlands: Elsevier, Jan. 2020, ch. 14, pp. 267–282.
[138] K. El Bouchefry and R. S. de Souza, ‘‘Learning in big data: Introduction to machine learning,’’ in Knowledge Discovery in Big Data From Astron-omy and Earth Observation, P. Škoda and F. Adam, Eds. Amsterdam, The Netherlands: Elsevier, Jan. 2020, ch. 12, pp. 225–249.
[139] W. Tong, A. Hussain, W. X. Bo, and S. Maharjan, ‘‘Artificial intel-ligence for vehicle-to-everything: A survey,’’ IEEE Access, vol. 7, pp. 10823–10843, 2019.
[140] R. Lattarulo, D. He, and J. Pérez, ‘‘A linear model predictive plan-ning approach for overtaking manoeuvres under possible collision cir-cumstances,’’ in Proc. IEEE Intell. Vehicles Symp. (IV), Jun. 2018, pp. 1340–1345.
[141] C.-C. Ho, B.-H. Huang, M.-T. Wu, and T.-Y. Wu, ‘‘Optimized base sta-tion allocation for platooning vehicles underway by using deep learning algorithm based on 5G-V2X,’’ in Proc. IEEE 8th Global Conf. Consum. Electron. (GCCE), Oct. 2019, pp. 1–2.
[142] M. Rihan, M. Elwekeil, Y. Yang, L. Huang, C. Xu, and M. M. Selim, ‘‘Deep-VFog: When artificial intelligence meets fog computing in V2X,’’ IEEE Syst. J., early access, Aug. 19, 2020, doi: 10.1109/JSYST.2020.3009998.
[143] Y. Xu, H. Zhou, J. Chen, B. Qian, W. Zhuang, and S. X. Shen, ‘‘V2X empowered non-signalized intersection management in the AI era: Opportunities and solutions,’’ IEEE Commun. Standards Mag., vol. 4, no. 4, pp. 18–25, Dec. 2020.
[144] Y. Liu, H. Wang, M. Peng, J. Guan, and Y. Wang, ‘‘An incentive mechanism for privacy-preserving crowdsensing via deep reinforcement learning,’’ IEEE Internet Things J., vol. 8, no. 10, pp. 8616–8631, May 2021.
[145] Y. Liu, T. Feng, M. Peng, J. Guan, and Y. Wang, ‘‘DREAM: Online control mechanisms for data aggregation error minimization in privacy-preserving crowdsensing,’’ IEEE Trans. Dependable Secure Comput., early access, Jul. 24, 2020, doi: 10.1109/TDSC.2020.3011679.
[146] F. Tariq, M. R. A. Khandaker, K.-K. Wong, M. A. Imran, M. Bennis, and M. Debbah, ‘‘A speculative study on 6G,’’ IEEE Wireless Commun., vol. 27, no. 4, pp. 118–125, Aug. 2020.
[147] I. F. Akyildiz, A. Kak, and S. Nie, ‘‘6G and beyond: The future of wireless communications systems,’’ IEEE Access, vol. 8, pp. 133995–134030, 2020.
[148] W. Saad, M. Bennis, and M. Chen, ‘‘A vision of 6G wireless systems: Applications, trends, technologies, and open research problems,’’ IEEE Netw., vol. 34, no. 3, pp. 134–142, May 2020.
[149] M. Di Renzo, K. Ntontin, J. Song, F. H. Danufane, X. Qian, F. Lazarakis,
J. De Rosny, D.-T. Phan-Huy, O. Simeone, R. Zhang, M. Debbah, G. Lerosey, M. Fink, S. Tretyakov, and S. Shamai, ‘‘Reconfigurable intel-ligent surfaces vs. relaying: Differences, similarities, and performance comparison,’’ IEEE Open J. Commun. Soc., vol. 1, pp. 798–807, 2020.