【MADRL】MADDPG运行MPE
文章目录
- MADDPG运行MPE
- 运行结果
- 代码
- 吐槽
MADDPG运行MPE
背景介绍就不讲了,MADDPG的代码从openai的github下载的,需要的自取;MPE的代码同样。
Tip: 由于我是在服务器上跑的,所以不能用environment的render()函数查看图形化界面。否则会报错Cannot connect to “None” from pyglet.gl import *;也可以解决,不过比较麻烦,建议自行百度
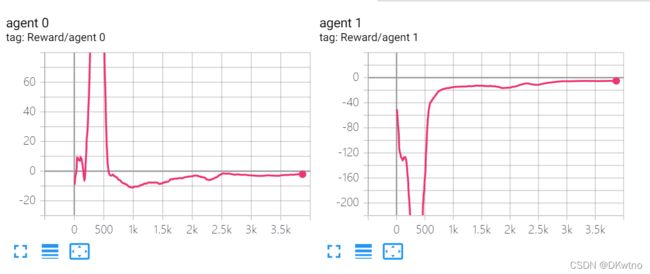
运行结果
分别展示global reward和agent reward。通过tensorboard展示的。可以看出来学得很快。

代码
虽然觉得应该没什么人有需要……贴上来了主部分的代码,其他的replay_buffer之类的在openai的github
import make_env
import numpy as np
from collections import deque
import time
from environment_curve import SimEnv
import numpy as np
import os
import time
import torch
import numpy as np
import torch.nn as nn
import torch.optim as optim
from parameter import parse_args
from replay_buffer import ReplayBuffer
from model_maddpg_curve import openai_actor, openai_critic_not_att
from torch.utils.tensorboard import SummaryWriter
project_name = 'maddpg_curve_na_bb' # not attention
writer = SummaryWriter(project_name)
TRUTH_V = 0
def local_make_env(arglist):
"""
create the environment from script
"""
env = make_env.make_env('simple_push')
return env
def get_trainers(env, obs_shape_n, action_shape_n, arglist):
"""
init the trainers or load the old model
"""
nagents = len(env.agents)
actors_cur = [None for _ in range(nagents)]
critics_cur = [None for _ in range(nagents)]
critics_tar = [None for _ in range(nagents)]
optimizers_c = [None for _ in range(nagents)]
actors_tar = [None for _ in range(nagents)]
optimizers_a = [None for _ in range(nagents)]
for i in range(nagents):
actors_cur[i] = openai_actor(obs_shape_n[i], env.action_space[0].n, arglist).to(arglist.device)
actors_tar[i] = openai_actor(obs_shape_n[i], env.action_space[0].n, arglist).to(arglist.device)
critics_tar[i] = openai_critic_not_att((obs_shape_n), (action_shape_n), arglist).to(arglist.device)
critics_cur[i] = openai_critic_not_att((obs_shape_n), (action_shape_n), arglist).to(arglist.device)
optimizers_c[i] = optim.Adam(critics_cur[i].parameters(), arglist.lr_c)
optimizers_a[i] = optim.Adam(actors_cur[i].parameters(), arglist.lr_a)
actors_tar = update_trainers(actors_cur, actors_tar, 1.0) # update the target par using the cur
critics_tar = update_trainers(critics_cur, critics_tar, 1.0) # update the target par using the cur
return actors_cur, critics_cur, actors_tar, critics_tar, optimizers_a, optimizers_c
def update_trainers(agents_cur, agents_tar, tao):
"""
update the trainers_tar par using the trainers_cur
This way is not the same as copy_, but the result is the same
out:
|agents_tar: the agents with new par updated towards agents_current
"""
for agent_c, agent_t in zip(agents_cur, agents_tar):
key_list = list(agent_c.state_dict().keys())
state_dict_t = agent_t.state_dict()
state_dict_c = agent_c.state_dict()
for key in key_list:
state_dict_t[key] = state_dict_c[key]*tao + \
(1-tao)*state_dict_t[key]
agent_t.load_state_dict(state_dict_t)
return agents_tar
# 重点代码!
def agents_train(arglist, game_step, update_cnt, memory, obs_size, action_size, \
actors_cur, actors_tar, critics_cur, critics_tar, optimizers_a, optimizers_c, activated_agents, env):
"""
use this func to make the "main" func clean
par:
|input: the data for training
|output: the data for next update
"""
# update all trainers, if not in display or benchmark mode
if game_step > arglist.learning_start_step and \
(game_step - arglist.learning_start_step) % arglist.learning_fre == 0:
if update_cnt == 0: print('\r=start training ...'+' '*100)
# update the target par using the cur
update_cnt += 1
for agent_idx, (actor_c, actor_t, critic_c, critic_t, opt_a, opt_c) in \
enumerate(zip(actors_cur, actors_tar, critics_cur, critics_tar, optimizers_a, optimizers_c)):
if agent_idx >= activated_agents or agent_idx < TRUTH_V: continue
if opt_c == None: continue # jump to the next model update
# sample the experience
_obs_n_o, _action_n, _rew_n, _obs_n_n, _done_n, activated_agents_n = memory.sample(arglist.batch_size, agent_idx) # --use the date to update the CRITIC
rew = torch.tensor(_rew_n, device=arglist.device, dtype=torch.float) # set the rew to gpu
done_n = torch.tensor(~_done_n, dtype=torch.float, device=arglist.device) # set the rew to gpu
action_cur_o = torch.from_numpy(_action_n).to(arglist.device, torch.float)
obs_n_o = torch.from_numpy(_obs_n_o).to(arglist.device, torch.float)
obs_n_n = torch.from_numpy(_obs_n_n).to(arglist.device, torch.float)
with torch.no_grad():
# 根据observation返回前x个truth的行为
action_tar = torch.cat([a_t(obs_n_n[:, obs_size[idx][0]:obs_size[idx][1]]).detach().cpu().to(arglist.device, torch.float) for idx, a_t in enumerate(actors_tar)], dim=1)
q_ = critic_t(obs_n_n, action_tar, agent_idx, activated_agents_n).reshape(-1)
tar_value = (q_*arglist.gamma*done_n + rew).detach() # q_*gamma*done + reward
q = critic_c(obs_n_o, action_cur_o, agent_idx, activated_agents_n).reshape(-1) # q
# q2 = critic_c_2(obs_n_o, action_cur_o, agent_idx, activated_agents).reshape(-1) # q
loss_c = torch.nn.MSELoss()(q, tar_value)
writer.add_scalar('Loss/C', loss_c, update_cnt)
opt_c.zero_grad()
loss_c.backward()
a = nn.utils.clip_grad_norm_(critic_c.parameters(), arglist.max_grad_norm)
opt_c.step()
model_out = actor_c(obs_n_o[:, obs_size[agent_idx][0]:obs_size[agent_idx][1]])
policy_c_new = model_out
# update the aciton of this agent
action_cur_o[:, action_size[agent_idx][0]:action_size[agent_idx][1]] = policy_c_new
if np.random.rand() > 0.5:
loss_a = torch.mul(-1, torch.mean(critic_c(obs_n_o, action_cur_o, agent_idx, activated_agents_n)))
opt_a.zero_grad()
(loss_a).backward()
nn.utils.clip_grad_norm_(actor_c.parameters(), arglist.max_grad_norm)
opt_a.step()
writer.add_scalar('Loss/A', loss_a, update_cnt)
torch.cuda.empty_cache()
# save the model to the path_dir ---cnt by update number
if update_cnt > arglist.start_save_model and update_cnt % arglist.fre4save_model == 0:
time_now = time.strftime('%y%m_%d%H%M')
print('=time:{} step:{} save'.format(time_now, game_step))
model_file_dir = os.path.join(arglist.save_dir, '{}_{}_{}_{}'.format( \
arglist.scenario_name, project_name, time_now, game_step))
if not os.path.exists(model_file_dir): # make the path
os.mkdir(model_file_dir)
for agent_idx, (a_c, a_t, c_c, c_t) in \
enumerate(zip(actors_cur, actors_tar, critics_cur, critics_tar)):
c_c = critics_cur[0]
torch.save(a_c, os.path.join(model_file_dir, 'a_c_{}.pt'.format(agent_idx)))
torch.save(a_t, os.path.join(model_file_dir, 'a_t_{}.pt'.format(agent_idx)))
torch.save(c_c, os.path.join(model_file_dir, 'c_c_{}.pt'.format(agent_idx)))
torch.save(c_t, os.path.join(model_file_dir, 'c_t_{}.pt'.format(agent_idx)))
# update the tar par
if np.random.rand()>0.5:
actors_tar = update_trainers(actors_cur, actors_tar, arglist.tao)
critics_tar = update_trainers(critics_cur, critics_tar, arglist.tao)
return update_cnt, actors_cur, actors_tar, critics_cur, critics_tar
def train(arglist):
"""
init the env, agent and train the agents
"""
"""step1: create the environment """
env = local_make_env(arglist)
print('=============================')
print('=1 Env {} is right ...'.format(arglist.scenario_name))
print('=============================')
"""step2: create agents"""
nagents = len(env.agents)
obs_shape_n = [env.observation_space[i].shape[0] for i in range(nagents)]
action_shape_n = [env.action_space[i].n for i in range(nagents)]
actors_cur, critics_cur, actors_tar, critics_tar, optimizers_a, optimizers_c = get_trainers(env, obs_shape_n, action_shape_n, arglist)
memory = ReplayBuffer(arglist.memory_size)
print('=2 The {} agents are inited ...'.format(nagents))
print('=============================')
"""step3: init the pars """
obs_size = []
action_size = []
game_step = 0
cur_episode = 0
update_cnt = 0
episode_cnt = 0
agent_info = [[[]]] # placeholder for benchmarking info
episode_rewards = [0.0] # sum of rewards for all agents
agent_rewards = [[0.0] for _ in range(nagents)] # individual agent reward
head_o, head_a, end_o, end_a = 0, 0, 0, 0
# 这里是对agent的观测空间不一致做的补偿
for obs_shape, action_shape in zip(obs_shape_n, action_shape_n):
end_o = end_o + obs_shape
end_a = end_a + action_shape
range_o = (head_o, end_o)
range_a = (head_a, end_a)
obs_size.append(range_o)
action_size.append(range_a)
head_o = end_o
head_a = end_a
print('=3 starting iterations ...')
print('=============================')
obs_n = env.reset()
for episode_gone in range(cur_episode, arglist.max_episode):
# cal the reward print the debug data
if game_step > 1 and game_step % arglist.per_episode_max_len == 0:
mean_ep_r = round(np.mean(episode_rewards[-200:-1]), 3)
for agent_idx in range(nagents):
mean_ep_ag_re = round(np.mean(agent_rewards[agent_idx][-200:-1]), 3)
writer.add_scalar('Reward/agent {}'.format(agent_idx), mean_ep_ag_re, episode_gone)
writer.add_scalar('Episode/reward', mean_ep_r, episode_gone)
print(" "*43 + 'episode reward:{}'.format(mean_ep_r), end='\r')
if game_step % 10000 == 0:
print('')
print()
print('=Training: steps:{} episode:{}'.format(game_step, episode_gone), end='\r')
for episode_cnt in range(arglist.per_episode_max_len):
# get action
action_n = [agent(torch.from_numpy(obs).to(arglist.device, dtype = torch.float)).detach().cpu().numpy() for agent, obs in zip(actors_cur, obs_n)]
if episode_gone < 20:
action_n = (np.random.rand(nagents, env.action_space[0].n) - 0.5) * 2
# interact with env
# 每个agent同时采取action
new_obs_n, rew_n, done_n, info_n = env.step(action_n)
activated_agent_n = len(env.agents)
# save the experience
memory.add(obs_n, np.concatenate(action_n), rew_n , new_obs_n, done_n, activated_agent_n)
episode_rewards[-1] += np.sum(rew_n)
for i, rew in enumerate(rew_n):
agent_rewards[i][-1] += rew
# train our agents
update_cnt, actors_cur, actors_tar, critics_cur, critics_tar = agents_train(\
arglist, game_step, update_cnt, memory, obs_size, action_size, \
actors_cur, actors_tar, critics_cur, critics_tar, optimizers_a, optimizers_c, activated_agent_n, env)
# update the obs_n
game_step += 1
obs_n = new_obs_n
done = np.any(done_n) # 所有done
terminal = (episode_cnt >= arglist.per_episode_max_len-1)
if done or terminal:
obs_n = env.reset()
agent_info.append([[]])
episode_rewards.append(0)
for a_r in agent_rewards:
a_r.append(0)
continue
writer.close()
writer.flush()
if __name__ == '__main__':
arglist = parse_args()
env = train(arglist)
吐槽
现在在写一篇应用MADRL的double auction的论文……真的是跑到崩溃,无数个模型都不好使,environment改了又改,妈个鸡……测试一下,maddpg,masac,qmix的代码应该都没问题,那只能再想想办法了……希望争取在5.15前写出来