《PyTorch深度学习实践9》——卷积神经网络-高级篇(Advanced-Convolution Neural Network)
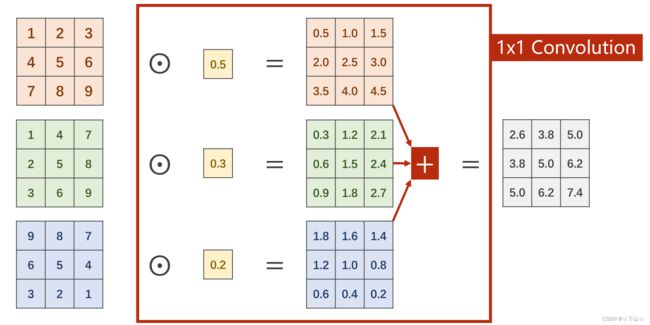
一、 1 ∗ 1 1*1 1∗1卷积
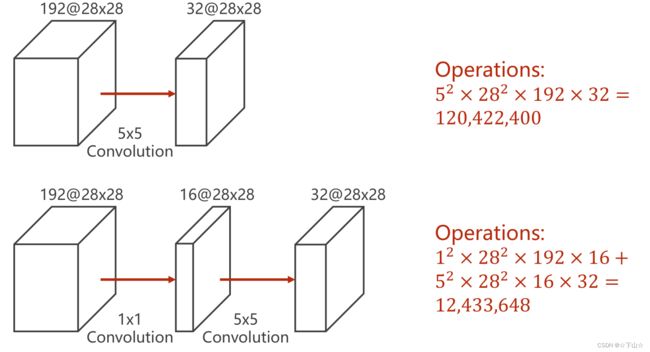
由下面两张图,可以看出 1 ∗ 1 1*1 1∗1卷积可以显著降低计算量。
通常 1 ∗ 1 1*1 1∗1卷积还有以下功能:
一是用于信息聚合,同时增加非线性, 1 ∗ 1 1*1 1∗1卷积可以看作是对所有通道的信息进行线性加权,即信息聚合,同时,在卷积之后可以使用非线性激活,可以一定程度地增加模型的表达能力;二是用于通道数的变换,可以增加或者减少输出特征图的通道数。
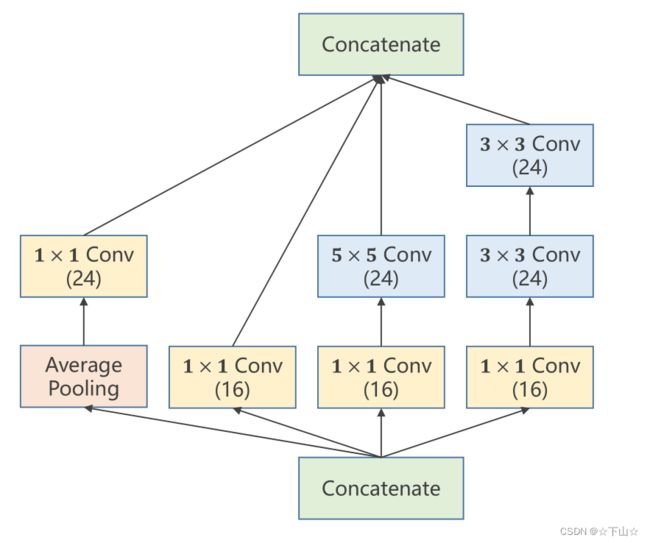
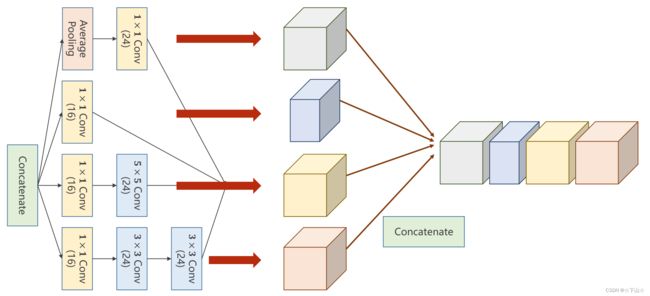
二、Inception Module
Inception V1首次使用了并行的结构。每个Inception块使用多个大小不同的卷积核,与传统的堆叠式网络每层只用一个尺寸的卷积核的结构完全不同。
Inception块的多个不同的卷积核可以提取到不同类型的特征,同时,每个卷积核的感受野也不一样,因此可以获得多尺度的特征,最后再将这些特征拼接起来。同时,为了降低计算成本,可以使用 1 ∗ 1 1*1 1∗1卷积进行降维。
import torch
import torch.nn as nn
from torchvision import transforms
from torchvision import datasets
from torch.utils.data import DataLoader
import torch.nn.functional as F
import torch.optim as optim
# prepare dataset
batch_size = 64
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,))]) # 归一化,均值和方差
train_dataset = datasets.MNIST(root='', train=True, download=True, transform=transform)
train_loader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size)
test_dataset = datasets.MNIST(root='', train=False, download=True, transform=transform)
test_loader = DataLoader(test_dataset, shuffle=False, batch_size=batch_size)
# design model using class
class InceptionA(nn.Module):
def __init__(self, in_channels):
super(InceptionA, self).__init__()
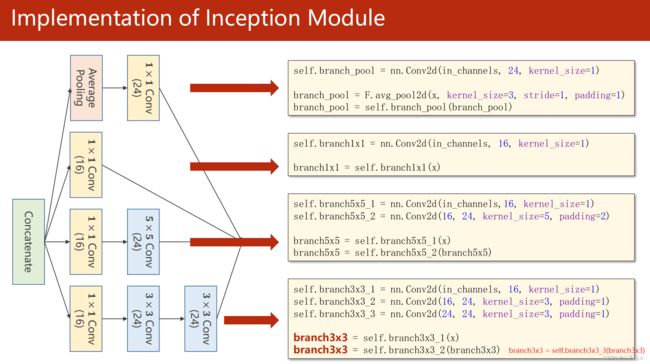
self.branch1x1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch5x5_1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch5x5_2 = nn.Conv2d(16, 24, kernel_size=5, padding=2)
self.branch3x3_1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch3x3_2 = nn.Conv2d(16, 24, kernel_size=3, padding=1)
self.branch3x3_3 = nn.Conv2d(24, 24, kernel_size=3, padding=1)
self.branch_pool = nn.Conv2d(in_channels, 24, kernel_size=1)
def forward(self, x):
branch1x1 = self.branch1x1(x)
branch5x5 = self.branch5x5_1(x)
branch5x5 = self.branch5x5_2(branch5x5)
branch3x3 = self.branch3x3_1(x)
branch3x3 = self.branch3x3_2(branch3x3)
branch3x3 = self.branch3x3_3(branch3x3)
branch_pool = F.avg_pool2d(x, kernel_size=3, stride=1, padding=1)
branch_pool = self.branch_pool(branch_pool)
outputs = [branch1x1, branch5x5, branch3x3, branch_pool]
return torch.cat(outputs, dim=1) #沿着channel拼接。 b,c,w,h c对应的是dim=1
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 10, kernel_size=5)
self.conv2 = nn.Conv2d(88, 20, kernel_size=5) # 88 = 24x3 + 16
self.incep1 = InceptionA(in_channels=10) # 与conv1 中的10对应
self.incep2 = InceptionA(in_channels=20) # 与conv2 中的20对应
self.mp = nn.MaxPool2d(2)
self.fc = nn.Linear(1408, 10)
def forward(self, x):
in_size = x.size(0)
x = F.relu(self.mp(self.conv1(x)))
x = self.incep1(x)
x = F.relu(self.mp(self.conv2(x)))
x = self.incep2(x)
x = x.view(in_size, -1)
x = self.fc(x)
return x
model = Net()
# construct loss and optimizer
criterion = torch.nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.5)
# training cycle forward, backward, update
def train(epoch):
running_loss = 0.0
for batch_idx, data in enumerate(train_loader, 0):
inputs, target = data
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs, target)
loss.backward()
optimizer.step()
running_loss += loss.item()
if batch_idx % 300 == 299:
print('[%d, %5d] loss: %.3f' % (epoch + 1, batch_idx + 1, running_loss / 300))
running_loss = 0.0
def test():
correct = 0
total = 0
with torch.no_grad():
for data in test_loader:
images, labels = data
outputs = model(images)
_, predicted = torch.max(outputs.data, dim=1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('accuracy on test set: %.2f %% ' % (100 * correct / total))
if __name__ == '__main__':
for epoch in range(10):
train(epoch)
test()
[1, 300] loss: 0.797
[1, 600] loss: 0.168
[1, 900] loss: 0.130
accuracy on test set: 97.21 %
[2, 300] loss: 0.106
[2, 600] loss: 0.096
[2, 900] loss: 0.088
accuracy on test set: 97.55 %
[3, 300] loss: 0.080
[3, 600] loss: 0.071
[3, 900] loss: 0.068
accuracy on test set: 98.22 %
[4, 300] loss: 0.058
[4, 600] loss: 0.059
[4, 900] loss: 0.061
accuracy on test set: 98.34 %
[5, 300] loss: 0.051
[5, 600] loss: 0.057
[5, 900] loss: 0.048
accuracy on test set: 98.51 %
[6, 300] loss: 0.048
[6, 600] loss: 0.043
[6, 900] loss: 0.047
accuracy on test set: 98.92 %
[7, 300] loss: 0.040
[7, 600] loss: 0.044
[7, 900] loss: 0.038
accuracy on test set: 98.81 %
[8, 300] loss: 0.034
[8, 600] loss: 0.041
[8, 900] loss: 0.037
accuracy on test set: 98.76 %
[9, 300] loss: 0.032
[9, 600] loss: 0.035
[9, 900] loss: 0.034
accuracy on test set: 98.82 %
[10, 300] loss: 0.031
[10, 600] loss: 0.033
[10, 900] loss: 0.031
accuracy on test set: 98.96 %
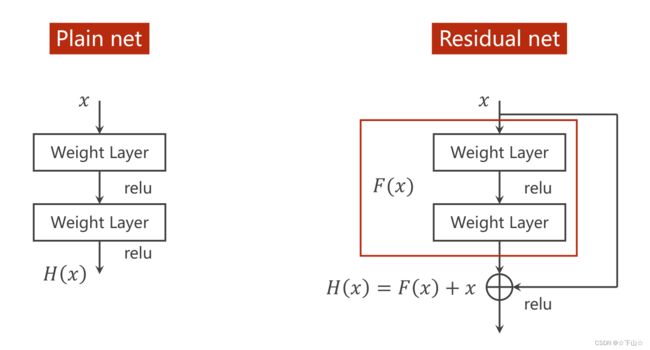
三、Simple Residual Network
残差网络从一定程度上解决了模型退化问题(由于优化困难而导致,随着网络的加深,训练集的准确率反而下降了),它在一个块的输入和输出之间引入一条直接的通路,称为跳跃连接。
跳跃连接的引入使得信息的流通更加顺畅:一是在前向传播时,将输入与输出的信息进行融合,能够更有效的利用特征;二是在反向传播时,总有一部分梯度通过跳跃连接反传到输入上,这缓解了梯度消失的问题。
import torch
import torch.nn as nn
from torchvision import transforms
from torchvision import datasets
from torch.utils.data import DataLoader
import torch.nn.functional as F
import torch.optim as optim
# prepare dataset
batch_size = 64
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,))]) # 归一化,均值和方差
train_dataset = datasets.MNIST(root='', train=True, download=True, transform=transform)
train_loader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size)
test_dataset = datasets.MNIST(root='', train=False, download=True, transform=transform)
test_loader = DataLoader(test_dataset, shuffle=False, batch_size=batch_size)
# design model using class
class ResidualBlock(nn.Module):
def __init__(self, channels):
super(ResidualBlock, self).__init__()
self.channels = channels
self.conv1 = nn.Conv2d(channels, channels, kernel_size=3, padding=1)
self.conv2 = nn.Conv2d(channels, channels, kernel_size=3, padding=1)
def forward(self, x):
y = F.relu(self.conv1(x))
y = self.conv2(y)
return F.relu(x + y)
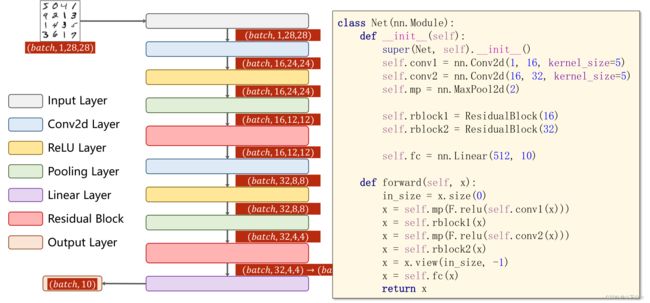
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 16, kernel_size=5)
self.conv2 = nn.Conv2d(16, 32, kernel_size=5) # 88 = 24x3 + 16
self.rblock1 = ResidualBlock(16)
self.rblock2 = ResidualBlock(32)
self.mp = nn.MaxPool2d(2)
self.fc = nn.Linear(512, 10)
def forward(self, x):
in_size = x.size(0)
x = self.mp(F.relu(self.conv1(x)))
x = self.rblock1(x)
x = self.mp(F.relu(self.conv2(x)))
x = self.rblock2(x)
x = x.view(in_size, -1)
x = self.fc(x)
return x
model = Net()
# construct loss and optimizer
criterion = torch.nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.5)
# training cycle forward, backward, update
def train(epoch):
running_loss = 0.0
for batch_idx, data in enumerate(train_loader, 0):
inputs, target = data
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs, target)
loss.backward()
optimizer.step()
running_loss += loss.item()
if batch_idx % 300 == 299:
print('[%d, %5d] loss: %.3f' % (epoch + 1, batch_idx + 1, running_loss / 300))
running_loss = 0.0
def test():
correct = 0
total = 0
with torch.no_grad():
for data in test_loader:
images, labels = data
outputs = model(images)
_, predicted = torch.max(outputs.data, dim=1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('accuracy on test set: %.2f %% ' % (100 * correct / total))
if __name__ == '__main__':
for epoch in range(10):
train(epoch)
test()
本文为系列文章:
| 上一篇 | 《Pytorch深度学习实践》目录 | 下一篇 |
|---|---|---|
| 卷积神经网络-基础篇(Basic-Convolution Neural Network) | 资料 | 循环神经网络-基础篇(Basic-Recurrent Neural Network) |