鉴源实验室丨汽车电子架构和CAN网络基础
作者 | 李伟 安全测评中心安全测评部总监
来源 | 鉴源实验室
系列简介:为了让不了解汽车电子零部件测试领域内知识的工程师尽快入门,或者让其他相关人员对本领域内的测试内容有所认识,我们编制了汽车电子测试相关的此系列文章。希望对阅读者有所帮助。本系列文章从汽车电子架构和网络历史开始,逐步往汽车电子零部件的嵌入式软件,零部件的通用基础功能各网络诊断服务等方面内容,从粗到细、由宽泛到具体,逐步展开。
01
汽车电子的分类和组成
汽车电子是车身电子控制装置和车载电子控制装置的总称。
a)车身电子控制装置主要包括:发动机控制系统、底盘控制系统和车身电子控制系统等,这三类是汽车传统的电子领域三大模块,常被称为动力、底盘和车身,我们通常谈及的汽车电子以及汽车电子研发一般也是指这三个模块内的电子零部件,同时也是汽车电子零部件各大传统巨头占据强大技术优势的领域,供应商如博世、大陆、法雷奥、安波福、伟世通等。汽车电子控制装置一般是指参与实现车辆启动及安全运行直接相关的那部分汽车电子装置,如发动机电子控制系统、燃油喷射控制系统、底盘电子控制系统、照明及灯光信号系统、ABS、ESP等等。
b)车载汽车电子装置,是在汽车环境下能够独立使用的电子装置,它和汽车本身驾驶属性并无直接关系。由于汽车已有100多年的发展历史,车身电子部分发展日趋成熟,而车载电子发展时间相对较短,且赋予了汽车许多其他功能,近年来得到飞速发展,国内零部件厂商在此领域占有一定优势,供应商如斑马智行、慧翰微电子、商汤科技等等,车载电子有车载冰箱、导航系统、影音娱乐系统、上网设备等。
1.1 汽车电子的发展阶段
第一个发展阶段,1971年以前。汽车上开始出现比较简单的电子控制设备,如电子闪光器、电子喇叭、间歇雨刮装置、汽车收音机、数字时钟、交流发电机等。
第二个发展阶段,1974~1982年。此阶段的标准是车载电子出现集成电路和16位以下的微处理器。主要包括自动门锁、自动灯光系统、高速警告系统、撞车预警传感器等。最具代表性的是电子汽油喷射技术和ABS技术的发展成熟,电子控制器控制机械功能在部分零部件上逐步成熟,这不意味着所有零部件上都是非常成功的,在此阶段机械与电器的融合总体并不成熟。
第三个发展阶段,1982~1990年。微电脑在汽车上的应用逐步可靠和成熟,开始出现向智能化方向发展的趋势。如胎压控制、电子道路监视器、加热挡风玻璃、倒车示警、自动后视镜等。
第四个发展阶段,从2005年至今。以自动防撞系统、动力优化系统、自动驾驶、导航技术为代表,标志性技术高级驾驶辅助的智能化汽车的出现。
02
汽车人的新革命-电子架构
2.1 汽车电子架构产生的背景
这次的故事是发生在梅赛德斯奔驰。2000年梅赛德斯奔驰技术有限公司在C级车开发时,面临一个问题:那就是电子电器越来越多,系统复杂性越来越高,如何将所有设备连接起来?我们都知道两两互联时,连线的个数是n(n-1)/2。新增零部件越来越多,原有的各系统通讯互联和开发方式的链路、成本、信号干扰将是原方式下无法解决的问题。结果是经过一系列的论证操作,最终决定推倒重构,重新设计整车电子电气,从根本解决问题。1年后该款车型电子电气总体设计完成,同步发布的E/E Analyse软件也应用于电子电气架构设计。
2.2 电子架构的技术发展划分
博世集团2017年在一场行业内会议上分享的汽车电子电气架构发展趋势图得到了业内的广泛认可,并逐渐成为了发展方向的标准指导,被大家广为引用。整个发展阶段被划分成立了6个步骤:
Modular模块化阶段:每功能ECU化设计;
Integration功能集成阶段;
Centralization中央域控制器阶段:中央域控集中管理ECU;
Domain Fusion跨域融合阶段:中央域控制器合并整合;
Vehicle Computer & Zone ECUs行车电脑和区域控制器:行车电脑集中管理,部分区域ECU独立管理;
Vehicle Cloud Conputing车载云计算阶段:车载功能云端计算。
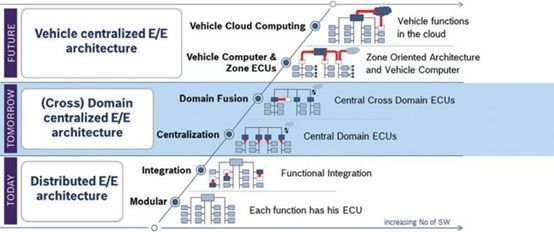
图1 汽车电子电气架构发展趋势图
目前行业主流所处的阶段为1阶段,即模块化阶段。同时也有部分厂商和车型出现了2阶段功能集成的车型量产。这部分厂商就是我们通常所说的以特斯拉为首的整车新势力。在汽车行业,他们在传统领域内无法跟那些垄断性的巨头相抗衡,只能通过立足未来的方式来降维跟传统企业形成竞争。这也是我们在这些车企的新车型上看到引入新的架构、新的技术和尝试。
随着车载以太网技术的加持,新兴车企在2阶段技术上遇到的问题远比我们想象的要小,遇到的阻力主要来源于市场的检验(可靠性和质量方面),以及传统车企的抵制和阻挠。
当车载以太网在车载通讯日趋成熟的时候,架构发展向3阶段演进在技术上几乎不存在难度,正常的零部件研发积累足够形成跨代发展的所需。3阶段和4阶段的区别也只是设计上通讯方式不一致,导致产品设计的不同。在通讯领域这种区别的技术问题早已解决,技术成熟发展了好多年,这可能跟博世的工程师在设计此图时谨慎考虑有一定关系。
整个架构中目前技术上的最大难点集中在了5阶段和6阶段,一个是中央行车电脑,另外一个是云计算中心。中央行车电脑的问题是目前我们所知的算力足够的主流处理器在车载环境下或者类似场景下没有任何应用,换句话说就是没有针对车载环境专门设计的高算力处理器和操作系统,这也会随着市场需求的发展逐步解决。云计算中心的问题是算力足够,但是车端和云端的通讯问题,数据传输响应和可靠性如何得到保证。
2.3发展趋势
行业内很多伙伴发表了一些发展趋势的言论,作者也在行业内,也因兴趣原因观察了许久,总结自己经验斗胆发表下自己关于汽车电子和行业的一些趋势看法,如有不同意见或引起不适敬请见谅。
最近这五年的时间段内,汽车电子的以惊人的速度爆发性的进行着发展。新能源汽车的蓬勃发展在特斯拉为首的电动汽车带动下,撬动着传统汽车的主导地位,我们在近期的车辆销售排行榜上可以看到前十里面有多款新能源汽车了。在汽车圈内很有可能发生当初苹果取代诺基亚的划时代事件,汽车电子大体呈现以下的发展趋势。
传统的燃油车市场趋向饱和,以节能减排、行业舆论、国家倡导和个人降低使用成本为目的,充电汽车、混合动力汽车增长强劲。
电动汽车等新能源汽车推动汽车电子快速发展,带动汽车电子产品的快速更新迭代,同时汽车电子在整车成本中的占比不断升高,部分电动汽车车型中电子产品占成本比例可能比同级别传统汽车高出一倍左右,并且继续增加。
软件定义汽车,这将不再是口号,软件将成为汽车竞争的关键优势。汽车领域零部件供应商的细分化,导致圈子内硬件系统和解决方案的共享和开放性。单个车企或车型不可能独占特有的零部件硬件,掌握软件开发的整车厂会掌握软件功能的独有性。软件将逐步成为车辆功能区别的标志。通过软件定义汽车不再是空话,软件将逐步成为车厂核心。
汽车开放系统架构将持续影响深远。Google开放了Android,在手机系统中和苹果联手控制了移动设备的操作系统领域。基于通用化、模块化、快速研发的考虑,汽车开放式系统架构目前高速在不同厂商中发展,这很可能变成汽车领域内的Android,并且没有汽车领域内的苹果,他可能会在汽车领域内一家独大。
汽车行业内特有的整车厂和零部件供应商的结构,导致全球性的巨头博士、大陆等在行业内形成反向的对主机厂的一定制约性,他们在传统的动力、车身、底盘领域的垄断性优势让新兴的厂商短时间内难以立足,且难以形成商业规模导致无法生存,这也是传统零部件厂商利益利润最大化,技术迭代缓慢等招人诟病的原因之一,也正是这点让新兴企业选择在车载电子这块传统巨头不重视的领域大力投入且不断发起挑战的原因。
以特斯拉为首的新兴企业在车载电子的迅速发展,阶段性取得一定利润,且在年轻人中逐步引导汽车消费思维,让传统厂商感受到一定危机,传统巨头也会向车载电子领域发展渗透。新兴企业也会立足车载电子,向车身电子发起挑战。根本解决一个问题的方法通常跟引起问题的原因不在一个领域,通常引入另一个维度的方法降维这个问题,因此新兴企业的挑战立足点应该是站在汽车电子架构的未来发展方向上,而不是跟传统巨头一样来拼当前ECU的解决方案。但是他们所选择的立足点是否能代表未来方向目前没有尘埃落定,只是在用户功能领域引起了不错的反响。
车载通讯及车载娱乐系统升级(FOTA和SOTA)的迅速普及,车载电子的趋于同质化,以及车身电子和车载电子软件系统的迭代更新速度差异,导致车厂在吸引消费者时,将加大对车载电子及软件的重视。
上述的整车趋于同质化,零部件厂商发展方向相互取长补短。我们似乎又看到了一个模子里出来的主机厂和零部件厂,这样所有厂商的利润会趋于降低,如何保证利润会是所有厂家的苦恼,而前面提到根本解决一个问题的方法通常跟引起问题的原因不在一个领域,通常引入另一个维度的方法降维这个问题,开源节流提高利润,我们说了开源的方向在未来厂家趋向同质化,节流这块一样需要有突破。传统的汽车和零部件研发方式已经沿用很久了,大家也都意识到自己零部件研发的通用性能有效降低成本,AUTOSAR这些体系的建立是为了不同厂商之间的快速对接,但是零部件厂商内部如何通用化绝对是一个待研究领域,新兴企业如果掌握了同类型零部件内部通用的研发手段,将极大提高业内的话语权和生存能力,因为同样一个零部件卖1000元,我内部通用化研发摊薄成本是300,业内平均成本是700,那多出来的部分就是厂家话语权的筹码。所以我们看到了AUTOSAR这种在不同厂商间的技术体系迅速发展并成为趋势,未来也一定会看到某个厂商内部建立的以大幅降低研发成本的设备通用化研发体系出现。
03
CAN 网络
3.1 CAN网络的重要性
之所以把CAN网络接着汽车电子后面就跟大家介绍,是因为CAN网络很重要。我们都知道上层技术的发展,如整体的上层技术路线、技术演进方向等等战略层面的技术变革都需要底层很多技术的成熟和积累才能实现,前文介绍电子架构诞生时讲过ECU的互联,那是属于上层的演进,而CAN网络技术则是支持这些技术变革的底层基石。从CAN网络诞生直至今日,一直是ECU通讯互联的方式。哪怕现在随着电子架构的演进,以太网架构的引入,目前市场上以及车企研发中的所有车型,CAN网络也是占主要地位,系统中CAN和以太网同时并存,且开发的模式几乎都是先基于CAN网络,然后向以太网移植。CAN网络把车上所有电子零部件连接在了一起,它是零部件研发中重要适配功能,整车的各种上层功能,也基于CAN网络的通讯得以在单个及多个零部件之间实现。CAN网络主管着整车的通讯。
3.2 CAN网络的诞生和发展阶段
CAN网络从上世纪80年代诞生发展至今,总共经历了5个关键阶段。
a)1983年,德国的Bosch公司开发设计了CAN总线协议;
b)1987年,第一块CAN控制器芯片由Intel公司设计成功;
c)1990年,第一辆应用CAN总线的量产车Mercedes S-Class出现;
d)1991年,CAN2.0发布;
e)1993年,CAN成为国际标准ISO 11898(高速应用) 和 ISO11519(低速应用)。
3.3 CAN网络的组成
CAN总线主要由四部分组成:导线、控制器、收发器和终端电阻。
a)CAN协议栈的通讯物理链路为两根普通铜芯双绞线;
b)CAN协议栈的控制器用于对收到和发送的信号进行处理。接收收发器的信号处理后送入MCU,接收MCU送入信号处理后发送给收发器;
c)CAN协议栈的收发器用于接受和发送信号。将网络信号接收发送给控制器处理,将控制器处理好的信号发送到网络;
d)电阻的作用是过滤CAN总线信号产生变化电压的反射,为120Ω(高速CAN)。若无终端电阻,控制单元的信号无效。需要注意的是在整车电子的设计解决方案中,如果整车统一设计了网络终端电阻,那ECU段无需再设计;如果ECU保留了终端电阻,那在整车统一电阻箱中就不能再配置电阻。二者只能选其一。在硬件研发阶段,如果SOR未标注,则必须跟项目相关DRE和VSE工程师进行确认。
3.4 CAN网络特点
a)CAN网络数据通信没有主从之分,任意一个节点可以向任何其他(一个或多个)节点发起数据通信,靠各个节点信息优先级先后顺序来决定通信次序;
b)多个节点同时发起通信时,低优先级节点的避让,不会对通信线路造成拥塞;
c)最大通信距离可达10KM(此时速率低于5Kbps),通讯速率可达到1Mbps(此时通信距离小于40M);
d)CAN总线经过多年的发展,可靠性非常高,也是以太网段时间无法取代CAN网络的原因之一。
3.5 CAN网络特点
CAN网络是一种复合的类星型网络,为什么说是类星型网络而不是星型网络后面会细说。因此在CAN网络中也存在一个网关,在传统的燃油车,或者现在一大批的车型当中,由BCM(车身控制器)来作为网关, 由于近几年新能源车的不断发展,BCM作为网关而集成的其他功能越来越多,因此很多厂商将这个“网关”的名字进行了变更,如IBDU、ICGM、中央行车电脑等等,大家看到名字跟我文中写的不一样时不用怀疑是否是文章写错了,这只是各个厂商名字的命名不一样。所以现在车辆当中的“网关”很多是由BCM逐渐集成其他功能,慢慢演变而来。
CAN网络总线由2根铜芯双绞线构成,一根can_high,一根can_low。类似通讯网络,在企业通讯网络中我们根据区域不同、部门不同等等将网络划分为不同的网段进行管理。在CAN网络中电子架构部门会根据整车电子零部件的不同使用或代表的归属属性进行划分,不同的划分我们叫做CAN网络域。同理我们上文提到的车身电子三大块,在网络中也是同样的划分,PT CAN为动力CAN、CH CAN为底盘CAN、Body CAN为车身CAN。这3个域适用于所有厂商所有商用车型。另外还有娱乐系统的Info CAN,Tbox车辆通讯出口的Diag CAN诊断CAN。除此之外电子架构会根据车型实际ECU进行自定义的网络域划分,在新研发的新能源车型中,CAN网络域的个数可以到达15个。电子架构组会定期发布整车CAN网络车架图,研发小伙伴需要定期同步,也可以从这个车架图中找到自身零部件所在域位置,以及其他通网络域的设备,是否有两两硬线互联的情况,如有直接互联使用何种连接(USB、纯硬线),这也是本章节前我提到的CAN网络是类星型网络的原因。在星型网络中通常不存在两两互联的情况,星型网络中多出两两直接互联情况,要不是错误连接导致环路,要不就是备用冗余链路设计。
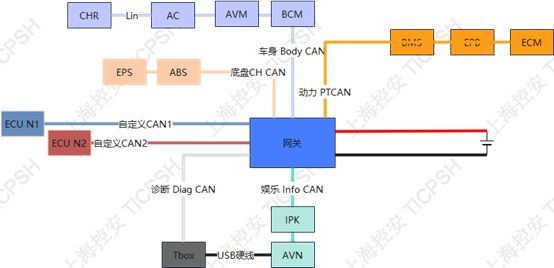
图2 车辆网络车架简图
a)PT CAN (PowerTrain CAN ) 动力总成CAN总线,顾名思义负责车辆动力系统,是整车所有CAN网络信号中优先级最高,信号传输速率最快的一条CAN总线。
PT CAN总线上一般有以下ECU:
· BMS ( Battery Management System ) 电池管理系统
· ECM ( Engine Control Module ) 发动机控制模块
· EPB ( Electronic Park Brake ) 电子驻车系统
b)CH CAN (Chassis CAN) 底盘控制CAN总线,车辆底盘控制整车转向、制动等,功能安全等级要求较高。
底盘CAN总线上一般有以下ECU:
· ABS ( Antilock Brake System ) 防抱死制动系统
· ESP(Electronic Stability Program)车身电子稳定系统
· EPS(Electric Power Steering)电子转向助力系统
c)Body CAN车身控制总线,车身CAN通常连接空调等辅助设备,网络信号优先级相对上面两个网络低。
Body CAN总线上一般有以下ECU:
· BCM(Body Control Module) 天窗, 车窗, 雾灯, 转向灯, 雨刮等
· TPMS(Tire Pressure Monitoring System) 胎压监控系统
· AC ( Air Condition ) 空调
d)Info CAN ( Infomercial CAN ) 娱乐系统总线,通常车载娱乐主机和车辆驾驶座仪表连接在娱乐CAN,因此通讯优先级也是较低。
Info CAN 总线上一般有以下ECU:
· AVN( Audio& Video Network) 车载娱乐系统,也有叫IVN等不同缩写的
· IPK(Instrument Pack) 中控仪表台
e)DiagCAN ( Diagnose CAN ) 诊断CAN
DiagCAN总线主要提供诊断功能,通常只有一个ECU:
· Tbox(Telematics BOX)
参考文献
[1] 车电子技术发展经历了哪三个阶段?https://zhidao.baidu.com/question/303452032222336804.html
[2] 科普中国-汽车电子. https://baike.baidu.com/item/%E6%B1%BD%E8%BD%A6%E7%94%B5%E5%AD%90/10692413
[3] 汽车电子电气架构的起源是什么?https://zhidao.baidu.com/question/495429057.html
[4] 汽车CAN总线入门. https://blog.csdn.net/weixin_48498880/article/details/111903144
关注“鉴源实验室”公众号,及时掌握科技前沿最新动态,欢迎后台留言与作者沟通交流~