SegDiff: Image Segmentation with Diffusion Probabilistic Models 基于扩散模型的图像语义分割模型
目录
Diffusion models是生成模型的一种,同样的还有GAN,VAE,Flow模型等
Abstract
3、背景
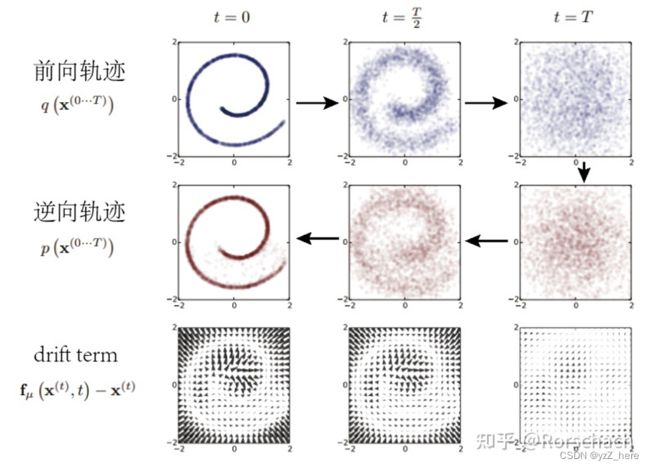
前向扩散表达:
反向生成过程:
4、理论
5、实验
论文地址:https://arxiv.org/pdf/2112.00390.pdf
代码:截至今天还未公开。
随着人工智能在图像生成,文本生成以及多模态生成等领域的技术不断累积,生成对抗网络(GAN)、变微分自动编码器(VAE)、normalizing flow models、自回归模型(AR)、energy-based models以及近年来大火的扩散模型(Diffusion Model)。

Diffusion models是生成模型的一种,同样的还有GAN,VAE,Flow模型等

SegDiff
Abstract
目前最先进的图像生成方法是采用扩散概率方法。在这项工作中,我们提出了一种方法来扩展这些模型执行图像分割。该方法学习端到端,不依赖于预先训练的主干。通过对两个编码器的输出求和,将输入图像中的信息与当前分割图估计中的信息合并。然后使用附加的编码层和一个解码器迭代细化分割映射,使用扩散模型。由于扩散模型是概率的,它被多次应用,结果被合并成一个最终的分割图。新方法在城市景观验证集、Vaihin- gen建筑分割基准和MoNuSeg数据集上产生了最先进的结果。
- introduce
扩散方法迭代地改进给定的图像,得到的图像质量与其他类型的生成模型(包括对数似然模型和对抗模型)相同或更好[10,19]。这种方法已被证明在许多代任务中表现出色,无论是有条件的还是无条件的。
绝大多数的扩散模型都应用于没有绝对GT的领域,其输出要么通过用户研究,要么使用几个质量和多样性分数进行评估。据我们所知,除了超分辨率[19,27,41]外,扩散模型还没有被应用到地GT唯一的问题中。
在这项工作中,我们解决了图像分割的问题。这个问题是经典计算机视觉和过去十年的深度学习方法的基石。该领域的主要方法采用不同结构的编码器-解码器网络[4, 31, 38, 50, 52, 53]。虽然已经尝试了对抗性方法[12,33,49,51],但它们并不构成当前的技术水平。
因此,扩散模型主要用于类似gan生成任务,在该领域是否具有竞争力是不确定的。在这项工作中,我们提出应用扩散模型来学习图像分割map。与图像分割领域的其他最新改进不同[13,22,44],我们对我们的方法进行端到端训练,而不依赖于预先训练的backbone。扩散模型采用了一个条件为输入图像的去噪网络,该去噪网络仅通过该信息与来自当前估计x t的信息的和进行聚合。具体来说,输入图像I和二值分割映射的当前估计xt通过两个不同的编码器,这些多通道张量的和通过U-Net[38]提供下一个估计xt−1。
由于生成过程本质上是随机的,因此可以得到多个解。正如我们所展示的,合并这些解决方案,通过简单地平均多次运行,导致总体精度的提高。求平均。
贡献:1、第一个应用扩散模型处理图像分割问题。
2、我们提出了一种基于输入图像的模型条件化的新方法
3、我们引入了多代的概念,以改善扩散模型的性能和校准
4、我们在多个基准上获得了最先进的结果。对于较小的数据集,差额尤其大。
2、related work
图像分割:图像分割是为每个像素分配一个标签,以确定它是否属于一个特定的类别的问题。这个问题在不同的体系结构中得到了广泛的研究。这些包括完全卷积网络[31],带有跳跃式连接的编码器-解码器架构,如U-Net[38],基于transformer的架构,如segformer[50],甚至结合了超网络的架构,如[36]。
扩散模型:扩散概率模型(DPM)[43]是一类基于马尔可夫链的生成模型,它可以将简单分布(如高斯分布)转换为复杂分布中的采样数据。扩散模组能够生成高质量的图像,可以与最新的GAN模组竞争,甚至优于它们[10,18,35,43]。引入了扩散模型相似度估计的变分框架
黄等。[21]。随后,Kingma等人提出了一种变分扩散模型,该模型对图像密度的似然估计产生了最先进的结果。扩散模型也被应用到语言模型中[2,20],其中使用了一种新的分类数据扩散模型。
条件扩散概率模型:在我们的工作中,我们使用扩散模型来解决图像分割问题作为条件生成,给定的图像。带有扩散模型的条件生成包含了类条件生成的方法,它是通过在时间戳中嵌入一个类来获得的。在[8]中提出了一种指导DDPM生成过程的方法。该方法允许根据给定的参考图像生成图像,而不需要任何额外的学习。
在超分辨率领域,对低分辨率图像进行上采样,然后在每次迭代时将其按通道连接到生成的图像上[19,41]。模拟方法将低分辨率图像在拼接前通过卷积块[27]。与我们的工作一致的是,扩散模型被应用于图像到图像的翻译任务[40]。这些任务包括去裁剪、填充和着色。得到的结果优于强GAN基线。
条件扩散模型也被用于语音生成。用卷积网络对mel谱图进行处理,并作为DPM去噪网络的附加输入[6,24,30]。此外,在[37]中引入了文本到语音的扩散模型,该模型使用文本作为扩散模型的条件。
在我们的工作中,我们采用了一种不同的方法来条件化,在输入图像通过卷积编码器后,将其添加(而不是连接)到分割图像的当前估计中。换句话说,我们学习了残差模型的DPM。
3、背景
我们简单介绍DDPM中的公式。扩散模型是由马尔可夫链参数化的生成模型,由正向过程和向后过程组成。

前向扩散过程数学表达:

反向生成过程:

4、理论

我们的方法修改了扩散模型,通过调节步长估计函数(该函数为Unet)的输入张量,该输入张量结合了来自当前估计Xt和输入图像I的信息。
在扩散模型中步长估计函数为Unet,在我们的模型中,我们步长函数可以用下式表达:
在我们的结构中Unet的decoder还是最基本的,但是encoder分为了三部分:E,F和G。G部分对图像进行处理,F对扩散模型生成的Xt进行处理,然后将G和F产生的特征相加(二者具有相同的size和维度)。然后传入到E部分中,当前的索引t被传递到两个不同的网络D和E中,
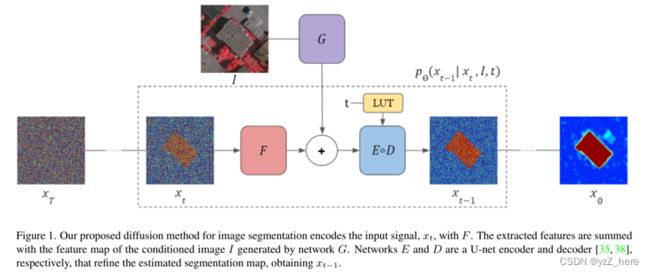
等式17中对I有条件的θ的输出代入等式16,取代了无条件的θ网络。由此产生的推断时间过程如图1所示,详见Alg. 1。
4.1 使用多尺度生成
因为在计算Xt-1时需要增加随机噪声,随机噪声都是标准正态分布。相同的输入在每次推理的时候都会有一定随机性的结果。所以我们将推理算法进行多次,然后对结果取平均值。
通过这种方式,得到了较为稳定的分割结果并提高了性能,如图2(c)所示。除了消融研究中的实验,我们在所有的实验中使用了30个生成的实例,消融研究量化了这个平均过程的增益。
4.2 traing
总的扩散次数T需要人为设置。对每一轮迭代,图像和mask都是随机获取的,迭代次数从均匀分布中采样的,噪声epsilon从正态分布中采样。
第t次的结果xt可以根据x0推导而来,图像i可以通过encoder G获得,然后通过网络E和G获得最后的预测输出。然后根据mask和预测值求的loss值,
4.3 结构
G:由残差块组成,结合了多尺度残差,没有采用BN层,
F是一个具有单通道输入和C通道输出的二维卷积层。
解码器部分E和D是基于Unet网络的。每一层都由残差块组成,在分辨率为16x16和8x8时,每个残差块后面都有一个注意层。瓶部包含两个残差块,中间有一个注意层。每个注意层包含多个注意头。
残差块由两个卷积块组成,每个卷积块包含GroupNorm、Silu激活函数和二维卷积层。残差块通过一个线性层、silu激活函数和另一个线性层接受time embedding。然后将结果添加到第一个2d卷积块的输出中。此外,残留块有一个传递其所有内容的残留连接。
在编码器侧(网络E),在相同深度的残块之后有一个下叠加块,这是一个步幅为2的二维卷积层。在解码器侧(网络D),在相同深度的残差块之后有一个上采样块,它由空间大小翻倍的最近插值组成,然后是二维卷积层。编码器中的每一层都有到解码器端的跳过连接。
5、实验
实验部分可以找原文去看。
