无人机动力组装与测试-电机、螺旋桨、电调、电池
无人机动力系统
综合实验实训教学课程
实验课程1:无人机动力系统组装及调试
课程内容:
- 无人机动力系统四大组成部分
- 无人机动力系统组装与调试
实验器材:
WF-EDU-02无人机动力测试教学仪实验套装
实验教学目标:
- 掌握无人机动力系统的四大组成部分基本构型;
- 能够完成动力系统的组装,并安装于动力系统测试台;
- 能够使用动力系统测试台及软件,完成动力系统的调试校准。
一、无人机动力系统四大组成部分:

图例:无人机动力系统连接图
无人机动力系统由螺旋桨、电机、电调和电池四大部分组成,由飞控发出控制信号到电调,电调控制电机转动,从而驱动螺旋桨旋转,螺旋桨旋转产生向上的升力从而使无人机起飞,电池负责为整个动力系统提供能量。
其中,电池的供电插头与电调电源插头,按照正极与正极,负极与负极相连方式进行连接;电调的三相线与电机的三相线连接,首次连接不用考虑连接次序,连接后任意交换其中两个接线的线序,则改变电机的旋转方向;电调的PWM信号线与信号控制端(飞控、测试台、接收机)进行连接。
1.螺旋桨
螺旋桨:指安装在电机上,靠桨叶在空气中旋转而产生推进力的装置。按桨叶数目分为双叶、三叶、四叶以及更多叶的桨。
图1.1.1 无人机桨叶
螺旋桨根据旋转方向不同,分为正桨和反桨。相邻方向一个是正桨,一个为反桨。

图1.1.2 无人机正桨、反桨位置分布
无人机如何区分螺旋桨是正桨还是反桨?首先了解桨的构型。
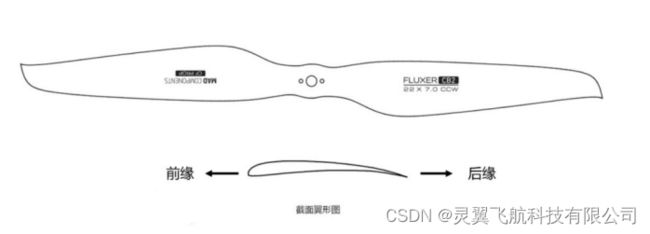
图1.1.3 桨叶构型
螺旋桨的正面:螺旋桨的刨面为翼型,较凸的一面是翼型的上表面,为桨的正面;一般在螺旋桨的正面印有螺旋桨的尺寸型号。螺旋桨的正面方向是产生升力/拉力的方向。
螺旋桨的前缘:螺旋桨的刨面翼型厚度大的一端是螺旋桨的前缘;螺旋桨的前缘位置也可以通过桨叶的外形轮廓来判断,螺旋桨外形轮廓主要是前缘和后缘的曲线构成,螺旋桨前缘轮廓比后缘轮廓更加平滑。螺旋桨前缘向前运动,即螺旋桨旋转的方向。
明确判断出螺旋桨的正面和旋转方向,再来做正反螺旋桨的区分:面向螺旋桨正面,逆时针旋转的螺旋桨为正桨,顺时针旋转的为反桨。
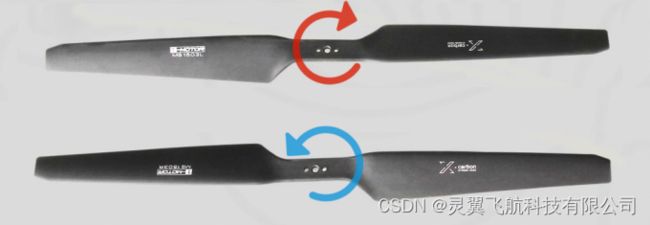
图1.1.4 无人机正桨和反桨
2.电机
无刷直流电机:无人机上使用的电机主要是三相无刷直流电机。无人机电机的主要作用是,驱动螺旋桨旋转,抵消螺旋桨在旋转过程中产生的扭矩。

图1.2.1 无人机电机图例
无人机电机主要为外转子无刷直流电机,基本结构为:永磁外转子、定子、轴承、主轴、底座。其中外转子包含与螺旋桨安装的组件,与螺旋桨进行固定安装;定子上有安装螺纹,使用螺栓与电机安装座进行固定安装。

图1.2.2 无人机电机结构图
电机的转向可以改变,通过改变三项线的连接次序,即任意交换其中两个接线的线序,即改变电机的旋转方向,实现正转或反转。在本次实验中,面对电机输出轴端,电机逆时针旋转为正转,顺时针旋转为反转。
3.电调

图1.3 无人机电调图例
电子调速器:简称电调,英文Electronic Speed Control(ESC)。无刷电调的作用是根据飞控的PWM信号,将电池的直流电源输入转换为一定频率的三相交流电源输出给电机,实现电机的换相,控制电机的转速。电调对转速的控制通过脉冲宽度调制(PWM)的控制方式实现,无刷直流电机的速度与电压大小有关,电压越高,转得越快;电压越低,转得越慢。用脉宽调制(PWM)方式来控制电机的输入电压。PWM占空比越高,等效电压就越高;占空比越低,等效电压就越低。
在飞机上第一次安装使用电调需要使用遥控器或者飞控对油门的行程进行校准。此次我们将使用测试台模拟电调油门行程校准。电调PWM的行程校准,即对应油门的行程量与电调PWM行程量进行一致性校准。
4.电池

图1.4.1电池
电池(化学电池)主要是由电极、电解液、隔膜等材料组成,可以将化学能转变为电能的装置。电池在动力系统中的作用:负责为整个动力系统的提供能量。

图1.4.2电池结构组成
最早应用于无人机航模的电池是镍氢电池,镍氢电池解决了镍镉电池记忆效应的问题,比镍镉电池电流更大、充电更快。随着无刷电机的普及,对电池电流提出了更高的要求,镍氢电池无法满足,锂聚合物电池凭借其优越的性能,在无人机上得到规模化应用,目前锂聚合物电池占据无人机电池市场90%以上份额。
- 实验实训内容
1.测试台架模拟动力系统安装及预调
 图2.1.1 动力系统连接图
图2.1.1 动力系统连接图
动力系统在无人机上的线路连接方式如上图所示,为了方便动力系统测试,我们把动力系统直接在WF-EDU-02测试台进行安装,同样按照动力系统在无人机上的线路连接方式,模拟动力系统安装。
- 实验器材及工具准备:
WF-EDU-02测试台:测试台主体、隔离笼、电源线、数据线;
动力系统:20A电调、3S电池(可采用测试台内部电源替换)、一组电机和螺旋桨:电机型号为2312-KV1000,螺旋桨型号为9450;
其他装配工具:内六角、螺栓、螺旋桨拆装夹。
课程一实验器材及工具准备
| 器材 |
型号 |
数量(备注) |
| 动力系统 |
||
| 电机 |
2312 KV1000 |
1个 |
| 螺旋桨 |
9450 |
正反桨 1对 |
| 电调 |
20A |
1个 |
| 电池 |
3S 1800mAh |
1个 |
| 测试台及安装工具 |
||
| 主体 |
1个 |
|
| 隔离笼 |
1个 |
|
| 电源线 |
1个 |
|
| 数据线 |
DB9 |
1个 |
| 电机座 |
快拆 |
1个 |
| 内六角 |
2.5mm |
1个 |
| 螺栓 |
4个 |
|
| 螺旋桨拆装夹 |
1个 |
|


图2.1.2 实验器材及工具
(2)将电机与电机座进行组装,然后在WF-EDU-02测试台安装固定,并将指定电机的三相线接入线缆快速接头;
 图2.1.3 电机安装步骤图
图2.1.3 电机安装步骤图
- 电调已经安装固定在WF-EDU-02测试台上,将电调出线与电机出线进行连接,电调PWM信号线与PWM控制信号线相连;

2.1.4 电调PWM信号线连接示意图
注:杜邦插头(3pin)(插图),白色为信号线,黑色为地线,在连接的时候不能接反。
(3)确保电机电源开关处于断开状态,电源切换开关在外接电源状态,电池接入WF-EDU-02测试台。
图2.1.5:电池接线示意图
2.电调行程校准
(1)确保动力测试设备电源总开关、电机电源开关处于关闭状态。将电源线一端插入设备电源孔,另一端插入220V电源,打开设备电源总开关,听到“滴滴滴”的声音,代表设备上电成功。

图2.2.1:设备上电示意图
(2)将数据线DB9端连接到设备,USB端连接到电脑,打开MET软件,系统会自动进行连接,设备发出“滴滴”的声音,代表软件连接成功。

图2.2.2:软件连接示意图
(3)将开关调至内部电源位置,打开电机电源开关,此时会听到“滴——”的电机上电提示音,电机上电成功;点击油门解锁,系统出现“滴滴”提示音,油门解锁成功;断开电机开关电源,将油门位置拖动至100%,打开电机开关电源,电机会发出“滴滴、嘀嘀嘀”的提示声,此时将油门快速拖动到0%的位置,或者按空格键,此时会听到“滴——”提示声,电调行程校准完成。

图2.2.3:电调行程校准示意图
3.电机正反转验证测试
(1)点击油门解锁,系统出现“滴滴”提示音,油门解锁成功,拖动油门查看电机转向,记录转向(正转或反转);

图2.3.1:电机转向测试示意图
- 断开动力电源,更换电机三相线中任意两项,开启动力电源,再次拖动油门查看电机转向,记录转向,通过第一次和第二次电机转向实验,可以判断,更改电机三相线中任意两项,可以变换电机转向。

图2.3.2:更换电机三相线转向测试示意图
4.电机、螺旋桨转向确定及螺旋桨安装
(1)首先确定螺旋桨转向,电机转向需和螺旋桨转向一致,根据螺旋桨转向,调整测试电机转向,确保电机和螺旋桨转向正确。

图2.4.1:电机、螺旋桨转向判断示意图
(2)确保电机转向正确后,断开动力电源,将螺旋桨安装在电机上,使用螺旋桨专用拆装工具(拆装夹子)将电机进行固定,然后将螺旋桨按照与转向相反的方向进行紧固,确保安装牢固,整个动力系统模拟安装完毕。

图2.4.2:螺旋桨安装示意图
螺旋桨拆卸时,确保电机电源处在关闭状态,使用螺旋桨专用拆装工具(拆装夹子)将电机进行固定,然后将螺旋桨按照与转向相同的方向进行拆卸。
实验小结:
本节课程实验分为两个部分:一是实验原理讲解部分,对无人机动力系统四大组成部分的基本构型及装配原理讲解,主要包含螺旋桨的正反桨区分,电机正反转区分,电调行程校准原理等方面的内容;二是实验实训部分,主要包含测试台架模拟动力系统安装及预调,电调行程校准,电机正反转验证测试,电机、螺旋桨转向确定及螺旋桨安装四个实验模块。
注:实验课程完毕后,请将实验器具恢复至实验前状态,将实验器材及工具放回到指定位置。