解决Hash(哈希表)冲突的四种方案
解决Hash(哈希)冲突的四种方案
参考&鸣谢
解决哈希冲突必须知道的几种方法 小僵鱼
你还应该知道的哈希冲突解决策略 vivo互联网技术
解决哈希冲突的三种方法 kaleidoscopic
每日一题(哈希表及哈希冲突解决办法) 和笙
文章目录
- 解决Hash(哈希)冲突的四种方案
-
- 一、Hash概述
- 二、开放寻址法
-
- 线性探查
- 二次探查
- 伪随机探测
- 三、链地址法(拉链法)
- 四、再哈希法
- 五、公共溢出区法
一、Hash概述
哈希是一种通过对数据进行压缩, 从而提高效率的一种解决方法,但由于哈希函数有限,数据增大等缘故,哈希冲突成为数据有效压缩的一个难题。本文主要介绍哈希冲突、解决方案,以及各种哈希冲突的解决策略上的优缺点。
哈希冲突即不同key值产生相同的地址,即发生了hash冲突。一般来说,哈希冲突是无法避免的,所以就有了解决方案。
常见的解决Hash冲突的方案有开放寻址法、链地址法和再哈希法。
二、开放寻址法
原理是当发生hash冲突时,会以当前地址为基准,然后根据寻址方法(探查寻址),去寻找下一次地址。若依旧发生冲突,则继续寻址,直到找到一个空的位置为止。 通用的散列函数形式为:
Hi=(H(key)+di)% m (i=1,2,…,n)
其中H(key)为哈希函数,m 为表长,di称为增量序列。增量序列的取值方式不同,相应的再散列方式也不同。
线性探查
顺序查找表的下一个单元,直到找到一个空单元或查遍全表。
即当hash值为3冲突时(假设此时hash表长度为11),利用线性探查的过程为:
H1 = (3+1)%11 = 4,此时若4依旧冲突,则再hash,即
H2 = (3+2)%11 = 5 … 通过这种线性增长增量系列,直到找到空的位置为止。
二次探查
这种方法的特点是,当哈希冲突时,在表的左右进行跳跃探测,比较灵活。
此时di = 1^2, -1^2, 2^2, -2^2 …
假设当hash值为3冲突时(假设此时hash表长度为11),利用二次探查的过程为:
H1 = (3+1^2)%11 = 4,此时若4依旧冲突,则再hash,即
H2 = (3+(-1)^2)%11 = 2 …
通过该方法直到找到空位置为止。
伪随机探测
这种方法即是产生一些随机系列值,并给定随机数作为起点。
假设当hash值为3冲突时(假设此时hash表长度为11),利用伪随机探测的过程为:
假设产生的随机系列为2,5,9 …,则
H1 = (3+2)%11 = 5
H2 = (3+5)%11 = 8
通过该方法直到找到空位置为止。
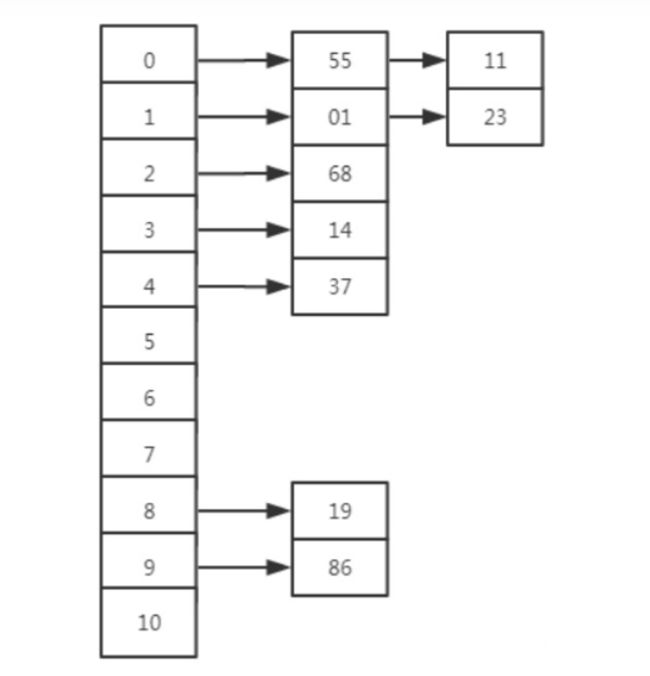
三、链地址法(拉链法)
HashMap,HashSet其实都是采用的拉链法来解决哈希冲突的,就是在每个位桶实现的时候,我们采用链表(jdk1.8之后采用链表+红黑树)的数据结构来去存取发生哈希冲突的输入域的关键字(也就是被哈希函数映射到同一个位桶上的关键字)。首先来看使用拉链法解决哈希冲突的几个操作:
- 插入操作:在发生哈希冲突的时候,我们输入域的关键字去映射到位桶(实际上是实现位桶的这个数据结构,链表或者红黑树)中去的时候,我们先检查带插入元素x是否出现在表中,很明显,这个查找所用的次数不会超过装载因子(n/m : n为输入域的关键字个数,m为位桶的数目),它是个常数,所以插入操作的最坏时间复杂度为O(1)的。
- 查询操作:和插入操作一样,在发生哈希冲突的时候,我们去检索的时间复杂度不会超过装载因子,也就是检索数据的时间复杂度也是O(1)的
- 删除操作:如果在拉链法中我们想要使用链表这种数据结构来实现位桶,在删除一个元素x的时候,需要更改x的前驱元素的next指针的属性,把x从链表中删除。这个操作的时间复杂度也是O(1)的。
与开放定址法相比,拉链法有如下几个优点:
①拉链法处理冲突简单,且无堆积现象,即非同义词决不会发生冲突,因此平均查找长度较短;
②由于拉链法中各链表上的结点空间是动态申请的,故它更适合于造表前无法确定表长的情况;
③开放定址法为减少冲突,要求装填因子α较小,故当结点规模较大时会浪费很多空间。而拉链法中可取α≥1,且结点较大时,拉链法中增加的指针域可忽略不计,因此节省空间;
④在用拉链法构造的散列表中,删除结点的操作易于实现。只要简单地删去链表上相应的结点即可。
拉链法的缺点
指针需要额外的空间,故当结点规模较小时,开放定址法较为节省空间,而若将节省的指针空间用来扩大散列表的规模,可使装填因子变小,这又减少了开放定址法中的冲突,从而提高平均查找速度。
四、再哈希法
fi=(f(key)+i*g(key)) % m (i=1,2,……,m-1)
其中,f(key) 和 g(key) 是两个不同的哈希函数,m为哈希表的长度
步骤:
双哈希函数探测法,先用第一个函数 f(key) 对关键码计算哈希地址,一旦产生地址冲突,再用第二个函数 g(key) 确定移动的步长因子,最后通过步长因子序列由探测函数寻找空的哈希地址。
比如,f(key)=a 时产生地址冲突,就计算g(key)=b,则探测的地址序列为 f1=(a+b) mod m,f2=(a+2b) mod m,……,fm-1=(a+(m-1)b) % m。
缺点:
每次冲突都要重新散列,计算时间增加。
五、公共溢出区法
即设立两个表:基础表和溢出表。将所有关键字通过哈希函数计算出相应的地址。然后将未发生冲突的关键字放入相应的基础表中,一旦发生冲突,就将其依次放入溢出表中即可。
在查找时,先用给定值通过哈希函数计算出相应的散列地址后,首先与基本表的相应位置进行比较,如果不相等,再到溢出表中顺序查找。