【ESP32】嵌入式FreeRtos--队列Queue
基础知识
队列:先入先出(FIFO,first in first out)
使用方法:
- 创建队列长度、尺寸(每个信息内存空间的大小)
- 发送数据
- 取数据
| API | 功能 |
|---|---|
| xQueueCreate() | 创建一个队列 |
| xQueueSend() | 往队列里写数据 |
| xQueueReceive | 从队列里读数据 |
| uxQueueMessagesWaiting(队列句柄) | 返回值为队列中参数的个数,可用于接收数据时,先判断一下队列里是否有数据 |
// 创建一个队列
QueueHandle_t xQueueCreate(UBaseType_t uxQueueLength, UBaseType_t uxItemSize); // API
QueueHandle_t Qhandle = xQueueCreate(5, sizeof(int)); // 创建一个队列,长度为5,每个空间的大小为int
// 发送队列数据API
BaseType_t xQueueSend(
QueueHandle_t xQueue,
const void *pvItemToQueue,
TickType_t xTicksToWait);
// 示例
void send(void *pt)
{
QueueHandle_t Qhandle = (QueueHandle_t)pt; // 进行强制类型转换,转换为队列句柄
BaseType_t xStatus; // 记录数据是否发送成功
char i = 0; // 要发送的数据
while (1)
{
/*参数1:队列的句柄;参数2:要发送的数据; 参数3:超时等待时间*/
xStatus = xQueueSend(Qhandle, &i, 0);
if (xStatus != pdPASS)
{
Serial.println("发送失败");
}
else
Serial.println("发送成功");
i++;
if (i == 8)
i = 0;
vTaskDelay(1000);
}
}
// 接收队列API
BaseType_t xQueueReceive(
QueueHandle_t xQueue,
void *pvBuffer,
TickType_t xTicksToWait);
// 示例
void receive(void *pt)
{
int j = 0; // 接收数据
while (1)
{
if (xQueueReceive(Qhandle, &j, 0) != pdPASS)
{
Serial.println("接收失败");
}
else
{
Serial.print("接收成功:");
Serial.println(j);
}
vTaskDelay(1000);
}
}
示例1:队列存储int数据
#include 运行结果:

示例2:传递结构体(常用)
// 声明一个结构体
struct Struct
{
int id;
int a;
};
QueueHandle_t Qhandle = xQueueCreate(5, sizeof(xStruct));在上个程序的基础上进行创建的队列每个空间的大小- 修改队列的地址
#include 运行结果:
发送成功
接收成功:1
55
发送成功
接收成功:2
55
示例3:传递大数据时,把指针对应的数据进行传递
malloc()函数使用:在使用malloc开辟空间时,使用完一定要释放空间,如果不释放会造成内存泄漏。malloc()函数返回的实际是一个无类型指针,必须在其前面加上指针类型强制转换才可以使用。指针自身 = (指针类型*)malloc(sizeof(指针类型)*数据数量)
int *p = NULL;
int n = 10;
p = (int *)malloc(sizeof(int)*n);
free()释放malloc()函数给指针变量分配的内存空间。注意:使用后该指针变量一定要重新指向NULL,防止野指针(悬空指针、失效指针)出现。
int *p = (int *)malloc(sizeof(int));
*p = 100;
free(p);
p = NULL;
队列的多进单出:多个任务写,一个任务读
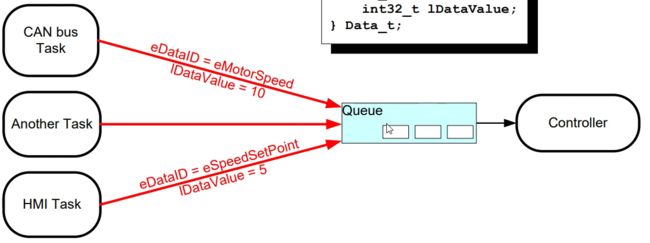
多个任务输入一个队列,一个任务读队列中的数据,此时注意设置任务的优先级别,设置写入的任务级别为1(各任务之间轮流发送数据),读任务的优先级别为2。
portMAX_DELAY一直等待,直到队列中有数据就开始读
#include 运行结果:
发送成功
接收成功:2
发送成功
接收成功:1
队列集合:一个任务读不同的队列

xQueueCreateSet( const UBaseType_t uxEventQueueLength )参数为队列集合的总长度
/*把队列加入到集合中
参数1:需要加入的队列句柄;参数2:队列集合的句柄*/
BaseType_t xQueueAddToSet( QueueSetMemberHandle_t xQueueOrSemaphore,
QueueSetHandle_t xQueueSet );
// 从队列集合中选择有数据的队列
QueueSetMemberHandle_t xQueueSelectFromSet( QueueSetHandle_t xQueueSet,
const TickType_t xTicksToWait );
#include 队列邮箱:一个任务写,多个任务读

BaseType_t xQueueOverwrite( QueueHandle_t xQueue, const void *pvItemToQueue );往队列邮箱中写入数据
// 从队列邮箱中读数据
BaseType_t xQueuePeek( QueueHandle_t xQueue,
void *pvBuffer, TickType_t
xTicksToWait );
#include