腾讯TNN神经网络推理框架手动实现多设备单算子卷积推理
文章目录
-
- 前言
- 1. 简介
- 2. 快速开始
-
- 2.1 onnx转tnn
- 2.2 编译目标平台的 TNN 引擎
- 2.3 使用编译好的 TNN 引擎进行推理
- 3. 手动实现单算子卷积推理(浮点)
- 4. 代码解析
-
- 4.1 构建模型(单卷积层)
- 4.2 构建解释器
- 4.3 初始化tnn
- 5. 模型量化
-
- 5.1 编译量化工具
- 5.2 量化流程
- 5.3 feature map量化
-
- 5.3.1 range_per_channel_的计算
- 5.3.2 interval_per_channel_的计算
- 5.3.3 distribute_per_channel_的计算
- 5.3.4 scale的计算与存储
- 5.4 weight量化
-
- 5.4.1 前处理
- 5.4.2 weight量化策略
- 5.4.3 scale存储
- 5.5 bias量化
- 5.6 8bit推理过程
- 6. im2col实现卷积计算
-
- 6.1 input为单通道,weight为单通道(输出)
- 6.2 input为多通道,weight为单通道(输出)
- 6.3 input为多通道,weight为多通道(输出)
- 结束语
前言
近期调研了一下腾讯的TNN神经网络推理框架,因此这篇博客主要介绍一下TNN的基本架构、模型量化以及手动实现x86和arm设备上单算子卷积推理。
1. 简介
TNN是由腾讯优图实验室开源的高性能、轻量级神经网络推理框架,同时拥有跨平台、高性能、模型压缩、代码裁剪等众多突出优势。TNN框架在原有Rapidnet、ncnn框架的基础上进一步加强了移动端设备的支持以及性能优化,同时借鉴了业界主流开源框架高性能和良好拓展性的特性,拓展了对于后台X86、NV GPU的支持。手机端TNN已经在手机QQ、微视、P图等众多应用中落地,服务TNN作为腾讯云AI基础加速框架已为众多业务落地提供加速支持。
TNN开源地址:https://github.com/Tencent/TNN
2. 快速开始
2.1 onnx转tnn

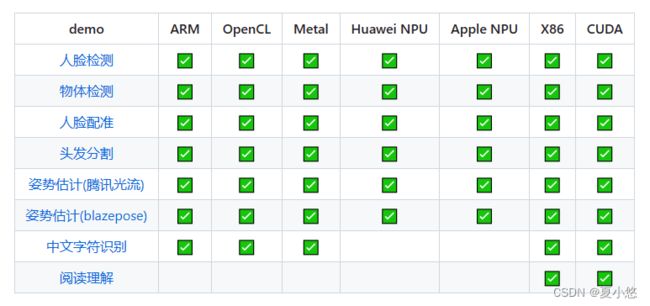
&emsp目前 TNN 支持业界主流的模型文件格式,包括ONNX、PyTorch、TensorFlow、TesorFlow-Lite 以及 Caffe 等。如上图所示,TNN 将 ONNX 作为中间层,借助于ONNX 开源社区的力量,来支持多种模型文件格式。如果要将PyTorch、TensorFlow 以及 Caffe 等模型文件格式转换为 TNN,首先需要使用对应的模型转换工具,统一将各种模型格式转换成为 ONNX 模型格式,然后将 ONNX 模型转换成 TNN 模型。

为了简化 convert2tnn转换工具的安装和编译步骤,官方推荐使用docker镜像:
# 建议直接从 docker hub 上拉取镜像
docker pull ccr.ccs.tencentyun.com/qcloud/tnn-convert
# 对 docker 镜像进行重命名
docker tag ccr.ccs.tencentyun.com/qcloud/tnn-convert tnn-convert:latest
docker rmi ccr.ccs.tencentyun.com/qcloud/tnn-convert
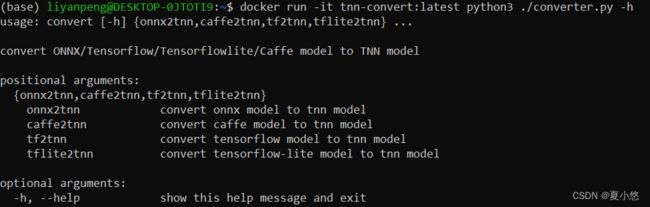
# 通过打印 convert2tnn 的帮助信息来验证下 docker 镜像能够正常使用
docker run -it tnn-convert:latest python3 ./converter.py -h
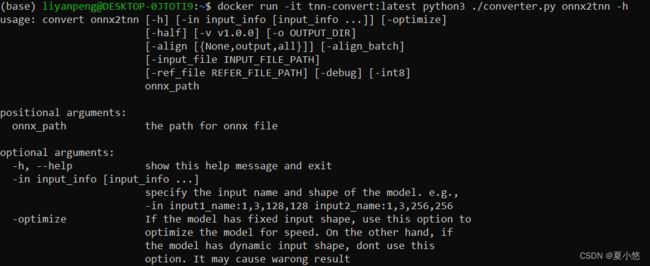
进一步的,查看下ONNX转TNN工具:
docker run -it tnn-convert:latest python3 ./converter.py onnx2tnn -h
具体参数不再进行过多详述,可参阅官方文档。
本例就以Resnet50为例,将其转为tnn格式:
import torch
from torchvision.models.resnet import resnet50
if __name__ == '__main__':
model = resnet50()
model.load_state_dict(torch.load('model/resnet50-0676ba61.pth'))
model.eval()
input_data = torch.randn(size=(1, 3, 224, 224), dtype=torch.float32)
input_names, output_names = ["input"], ["output"]
torch.onnx.export(model, input_data, "model/resnet50.onnx", input_names=input_names, output_names=output_names)
# 当然,也可以直接使用onnx格式的resnet50,下载链接为:https://github.com/onnx/models/tree/main/vision/classification/resnet/model
# 启动docker
docker run -v /home/liyanpeng/tnn_docker:/home/liyanpeng/tnn_docker --rm -it tnn-convert:latest /bin/bash
# cd /opt/TNN/tools/convert2tnn(default)
# onnx2tnn
python3 ./converter.py onnx2tnn /home/liyanpeng/tnn_docker/model/resnet50.onnx -in input:1,3,224,224

2.2 编译目标平台的 TNN 引擎
编译相关注意事项请参考官方文档。
arm-linux平台编译:
apt-get install g++-aarch64-linux-gnu gcc-aarch64-linux-gnu
apt-get install g++-arm-linux-gnueabihf gcc-arm-linux-gnueabihf
# apt-get install vim gdb
cd scripts
./build_aarch_linux.sh
x86-linux平台编译:
cd scripts
./build_linux_native.sh
2.3 使用编译好的 TNN 引擎进行推理
上面那个没有编译具体的实例,接下来编译x86平台下各任务下的TNN引擎:
# x86平台编译
cd examples/linux/x86
./build_linux_native.sh
# arm-linux交叉编译
# cd examples/linux/cross
# ./build_aarch64_linux.sh

![]()
执行图像分类任务:
./demo_x86_imageclassify -p /home/liyanpeng/tnn_docker/model/resnet50.tnnproto -m /home/liyanpeng/tnn_docker/model/resnet50.
tnnmodel -i /home/liyanpeng/tnn_docker/model/tiger_cat.jpg
推理结果也是正确的:

各任务源码位置:
examples/linux/src
3. 手动实现单算子卷积推理(浮点)
TNN框架构建神经网络推理实例需要输入两个文件,一个是模型结构文件.tnnproto,一个是模型权重文件.tnnmodel,这两个文件是必须的。但由于一些特殊的需要,这种文件的方式不太适用,因此我这里提供了一个手动创建模型结构的实例,不用依赖于模型文件。
仿照
examples/linux/src目录下的TNNImageClassify图像分类demo,我在根目录下创建了一个my_cnn_model目录,其中包括my_conv.cpp和CMakeLists.txt两个文件。
my_conv.cpp文件内容如下:
// Author: xiayouran
// Email: [email protected]
// Datetime: 2023/4/8 15:17
// Filename: my_conv.cpp
#include "tnn/core/tnn.h"
#include "tnn/interpreter/abstract_model_interpreter.h"
#include "tnn/interpreter/tnn/model_interpreter.h"
using namespace TNN_NS;
int main(int argc, char* argv[]) {
auto model_type = MODEL_TYPE_TNN;
auto device_type = DEVICE_X86;// DEVICE_ARM
auto data_type = DATA_TYPE_FLOAT;// DATA_TYPE_INT8
ModelConfig model_config;
model_config.model_type = model_type;
NetworkConfig net_config;
net_config.device_type = device_type;
TNN tnn;
Status status = tnn.MyInit(model_config);
auto instance = tnn.CreateInst(net_config, status);
BlobMap input_blobs;
status = instance->GetAllInputBlobs(input_blobs);
Blob* input_blob = input_blobs.begin()->second;
float* data_ptr = static_cast<float*>(input_blob->GetHandle().base);
for (int i = 0; i < 1 * 1 * 4 * 4; i++) {
data_ptr[i] = (float)1.0 + i;
}
status = instance->Forward();
BlobMap output_blobs;
status = instance->GetAllOutputBlobs(output_blobs);
Blob* output_blob = output_blobs.begin()->second;
float* out_data_ptr = static_cast<float*>(output_blob->GetHandle().base);
for (int i = 0; i < 1 * 1 * 2 * 2; i++) {
std::cout << out_data_ptr[i] << std::endl;
}
return 0;
}
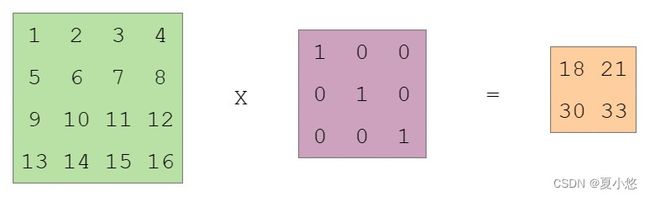
卷积的输入shape为(1, 1, 4, 4),卷积的shape为(1, 1, 3, 3),卷积的输出shape为(1, 1, 2, 2),具体为:
运行结果如下:

在CMakeLists.txt文件中除了添加了本示例代码my_conv.cpp,还添加了官方提供的图像分类demo的TNNImageClassify.cc及其依赖,具体内容如下:
file(GLOB MyCNNModel_SRCS my_conv.cpp)
file(GLOB ImageClassify_SRCS ${CMAKE_CURRENT_SOURCE_DIR}/../examples/linux/src/TNNImageClassify/TNNImageClassify.cc)
message(${MyCNNModel_SRCS})
message(${ImageClassify_SRCS})
#include_directories(../include)
#include_directories(../source)
include_directories(${CMAKE_CURRENT_SOURCE_DIR}/../examples/base)
include_directories(${CMAKE_CURRENT_SOURCE_DIR}/../examples/base/utils)
include_directories(${CMAKE_CURRENT_SOURCE_DIR}/../examples/utils)
add_subdirectory(${CMAKE_CURRENT_SOURCE_DIR}/../third_party/gflags ${CMAKE_CURRENT_SOURCE_DIR}/../third_party/gflags)
get_target_property(GFLAGS_INCLUDE_DIRS gflags INTERFACE_INCLUDE_DIRECTORIES)
include_directories(BEFORE "${GFLAGS_INCLUDE_DIRS}")
link_libraries(gflags)
file(GLOB FLAG_SRC "${CMAKE_CURRENT_SOURCE_DIR}/../examples/linux/src/*.cc")
file(GLOB_RECURSE BASE_SRC
"${CMAKE_CURRENT_SOURCE_DIR}/../examples/base/*.cc"
"${CMAKE_CURRENT_SOURCE_DIR}/../examples/base/utils/*.cc")
file(GLOB_RECURSE UTIL_SRC
"${CMAKE_CURRENT_SOURCE_DIR}/../examples/utils/*.cc")
include_directories(${CMAKE_CURRENT_SOURCE_DIR}/../source/tnn/interpreter/tnn)
include_directories(${CMAKE_CURRENT_SOURCE_DIR}/../third_party/stb)
add_executable(my_conv_cmd ${MyCNNModel_SRCS})
add_executable(demo_x86_imageclassify_cmd ${ImageClassify_SRCS} ${BASE_SRC} ${UTIL_SRC} ${FLAG_SRC})
target_link_libraries(my_conv_cmd TNN)
target_link_libraries(demo_x86_imageclassify_cmd TNN)
set_target_properties(my_conv_cmd PROPERTIES RUNTIME_OUTPUT_DIRECTORY ${PROJECT_BINARY_DIR})
set_target_properties(demo_x86_imageclassify_cmd PROPERTIES RUNTIME_OUTPUT_DIRECTORY ${PROJECT_BINARY_DIR})
4. 代码解析
按照官方提供的API说明,运行一个神经网络需要五个步骤:
# Step1. 模型解析
model_config.params.push_back(proto_buffer);# proto文件内容存入proto_buffer
model_config.params.push_back(model_buffer);# model文件内容存入model_buffer
Status ret = tnn.Init(model_config);
# Step2. 网络构建
auto net_instance = tnn.CreateInst(config, status);
# Step3. 输入设定
auto status = net_instance->SetInputMat(input_mat, input_cvt_param);
# Step4. 网络运行
auto status = net_instance->Forward();
# Step5. 输出获取
auto status = instance->GetOutputMat(output_mat);
在第一步模型解析中涉及到文件操作,理论上只要按照其他模型转tnn的格式写模型文件是不需要修改源码的,这里没有阅读这部分源码,因此就直接修改了源码。
经过源码分析,手动构建一个模型主要需要构建神经网络模型的各层layer并完成参数的初始化、模型解释器及tnn的初始化的构建,具体如下:
4.1 构建模型(单卷积层)
在source/tnn/interpreter/tnn/model_interpreter.cc文件中新增了ModelInterpreter::MyInterpret()函数,区别于官方的ModelInterpreter::Interpret(std::vector函数,本函数不需要从文件中去解析模型的结构和权重:
// Interpret the proto and model without file.
Status ModelInterpreter::MyInterpret() {
Status status = TNN_OK;
/****************初始化卷积层参数****************/
NetStructure *structure = GetNetStructure();
structure->source_model_type = MODEL_TYPE_TNN;
DimsVector &input_shape = structure->inputs_shape_map["input"];
input_shape.push_back(1);
input_shape.push_back(1);
input_shape.push_back(4);
input_shape.push_back(4);
DataType data_type = DATA_TYPE_FLOAT;// DATA_TYPE_FLOAT
structure->input_data_type_map["input"] = data_type;
structure->outputs.insert("output");
auto cur_layer = std::make_shared<LayerInfo>();
std::string type_str = "Convolution";
type_str = Transfer(type_str);
LayerType type = GlobalConvertLayerType(type_str);
cur_layer->type = type;
cur_layer->type_str = type_str;
cur_layer->name = Transfer("Conv_0");
cur_layer->inputs.clear();
cur_layer->outputs.clear();
cur_layer->inputs.push_back("input");
structure->blobs.insert("input");
cur_layer->outputs.push_back("output");
structure->blobs.insert("output");
LayerParam *layer_param = NULL;
LayerParam** param = &layer_param;
auto p = CreateLayerParam<ConvLayerParam>(param);
p->input_channel = 1;
p->output_channel = 1;
p->kernels = {3, 3};
p->strides = {1, 1};
p->pads = {0, 0, 0, 0};
p->dialations = {1, 1};
p->bias = 0;
p->pad_type = -1;
p->group = 1;
p->activation_type = 0;
layer_param->type = cur_layer->type_str;
layer_param->name = cur_layer->name;
if (data_type == DATA_TYPE_INT8) {
layer_param->quantized = true;
}
cur_layer->param = shared_ptr<LayerParam>(layer_param);
structure->layers.push_back(cur_layer);
/**************卷积层参数初始化结束**************/
/****************初始化卷积层权重****************/
NetResource *net_resource = GetNetResource();
LayerResource *layer_resource = NULL;
LayerResource** resource = &layer_resource;
auto layer_res = CreateLayerRes<ConvLayerResource>(resource);
layer_res->filter_format = OIHW;
// weight
RawBuffer weight_buf;
DimsVector weight_dims = {1, 1, 3, 3};
weight_buf = TNN_NS::RawBuffer(1*1*3*3*4);
weight_buf.SetDataType(data_type);
weight_buf.SetBufferDims(weight_dims);
float weight_data[1][1][3][3] = {{{{1.0, 0.0, 0.0},
{0.0, 1.0, 0.0},
{0.0, 0.0, 1.0}}}};
memcpy(weight_buf.force_to<float*>(), weight_data, 1*1*3*3*4);
layer_res->filter_handle = weight_buf;
// bias
RawBuffer bias_buf;
DimsVector bias_dims = {1};
bias_buf = TNN_NS::RawBuffer(4);
bias_buf.SetDataType(data_type);
bias_buf.SetBufferDims(bias_dims);
float bias_data[1] = {0.0};
memcpy(bias_buf.force_to<float*>(), bias_data, 1*4);
layer_res->bias_handle = bias_buf;
/****************以下操作浮点推理非必须****************/
// scale
RawBuffer scale_buf;
DimsVector scale_dims = {1};
scale_buf = TNN_NS::RawBuffer(4);
scale_buf.SetDataType(DATA_TYPE_FLOAT);
scale_buf.SetBufferDims(scale_dims);
float scale_data[1] = {1.0};
memcpy(scale_buf.force_to<float*>(), scale_data, 1*4);
layer_res->scale_handle = scale_buf;
// zero_point
RawBuffer zero_point_buf;
DimsVector zero_point_dims = {1};
zero_point_buf = TNN_NS::RawBuffer(1);
zero_point_buf.SetDataType(DATA_TYPE_INT8);
zero_point_buf.SetBufferDims(zero_point_dims);
int8_t zero_point_data[1] = {0};
memcpy(zero_point_buf.force_to<int8_t*>(), zero_point_data, 1*1);
layer_res->zero_point_handle = zero_point_buf;
/****************以上操作浮点推理非必须****************/
net_resource->resource_map["Conv_0"] = std::shared_ptr<LayerResource>(layer_resource);
// 不用解析constant_map
/**************卷积层权重初始化结束**************/
return status;
}
相应的,需要在source/tnn/interpreter/tnn/model_interpreter.h、source/tnn/interpreter/abstract_model_interpreter.h和source/tnn/interpreter/ncnn/ncnn_model_interpreter.h三个文件中添加本函数的声明:
// model_interpreter.h文件中的ModelInterpreter
virtual Status MyInterpret();
// abstract_model_interpreter.h文件中的AbstractModelInterpreter
virtual Status MyInterpret() = 0;
// ncnn_model_interpreter.h文件中的NCNNModelInterpreter
virtual Status MyInterpret();
4.2 构建解释器
在source/tnn/core/tnn_impl_default.cc文件中新增了TNNImplDefault::MyInit(ModelConfig& config)函数,函数实现大体与官方的TNNImplDefault::Init(ModelConfig& config)函数一样,只不过这里构建解释器时使用了MyInterpret()函数:
Status TNNImplDefault::MyInit(ModelConfig& config) {
auto status = TNNImpl::MyInit(config);
if (status != TNN_OK) {
return status;
}
auto interpreter = CreateModelInterpreter(config.model_type);
if (!interpreter) {
return Status(TNNERR_NET_ERR, "interpreter is nil");
}
interpreter_ = std::shared_ptr<AbstractModelInterpreter>(interpreter);
return interpreter_->MyInterpret();
}
TNNImpl::MyInit(config)函数的实现在在source/tnn/core/tnn_impl.cc文件中:
Status TNNImpl::MyInit(ModelConfig &config) {
model_config_.model_type = config.model_type;
return TNN_OK;
}
相应的,需要在source/tnn/core/tnn_impl_default.h和source/tnn/core/tnn_impl.h两个文件中添加本函数的声明:
// tnn_impl_default.h文件中的MyInit
virtual Status MyInit(ModelConfig& config);
// tnn_impl.h文件中的MyInit
virtual Status MyInit(ModelConfig& config);
4.3 初始化tnn
为了使tnn能够正确按照我们的方法进行初始化,需要添加TNN::MyInit(ModelConfig& config)函数以代替官方的TNN::Init(ModelConfig& config)函数进行初始化,具体在source/tnn/core/tnn.cc文件中:
Status TNN::MyInit(ModelConfig& config) {
impl_ = TNNImplManager::GetTNNImpl(config.model_type);
if (!impl_) {
LOGE("Error: not support mode type: %d. If TNN is a static library, link it with option -Wl,--whole-archive tnn -Wl,--no-whole-archive on android or add -force_load on iOS\n", config.model_type);
return Status(TNNERR_NET_ERR, "unsupported mode type, If TNN is a static library, link it with option -Wl,--whole-archive tnn -Wl,--no-whole-archive on android or add -force_load on iOS");
}
return impl_->MyInit(config);
}
相应的,需要在include/tnn/core/tnn.h文件中添加本函数的声明:
// tnn.h文件中的MyInit
Status MyInit(ModelConfig& config);
至此,手动构建单算子卷积推理所需的要素已经构建完毕,在根目录下的CMakeLists.txt文件中添加本示例的代码目录进行编译即可:
add_subdirectory(my_cnn_model)
5. 模型量化
5.1 编译量化工具
# 编译
cd platforms/linux/
./build_quanttool.sh -c
# 执行量化
cd build_quantize/
./quantization_cmd -p /home/liyanpeng/tnn_docker/model/resnet50.tnnproto -m /home/liyanpeng/tnn_docker/model/resnet50.tnnmodel -i /home/liyanpeng/tnn_docker/imagenet128/ -o resnet50

浮点模型大小为98M,量化后的定点模型为26M:


使用量化模型进行推理:
./demo_x86_imageclassify -p /opt/TNN/platforms/linux/build_quantize/resnet50.quantized.tnnproto -m /opt/TNN/platforms/linux/build_quantize/resnet50.quantized.tnnmodel -i /home/liyanpeng/tnn_docker/model/tiger_cat.jpg
这里只是用128张图片进行的量化,所以精度损失较大,推理结果不大对:
![]()
更改了1000张图片进行的量化,feature map的量化方式采用KL,weight的方式采用MIN_MAX/ADMM,也更换了测试图片,推理结果都不行:
![]()
5.2 量化流程
TNN默认采用Min-Max量化方式,除此之外,feature map支持KL量化方法,weight支持ADMM量化方法,具体的量化流程如下:
calibration.Init(net_config, model_config)
/*根据输入shape,计算出每个网络层的输出shape*/
calibration.SetCalibrationParams(cali_params)
/*设置量化方式为MIN_MAX*/
calibration.RunCalibration(dataset)
/*scale计算和量化*/
CalBlobScale(dataset);// Compute Feature Scale
InitFeatureMap();// Init Feature map(在此之前进行了reshape),初始化每个feature map的range_per_channel_等参数
UpdateBlobRange(dataset);// Collect the Range of Feature map,更新range_per_channel_
UpdateRange()
UpdateBlobDistribute(dataset);// Calculate Distribute of Feature map
ResetDistribute()// 根据range_per_channel_计算valid_channel_和interval_per_channel_,并初始化distribute_per_channel_
UpdateDistribute()//
CalculateScale(scale_vec, zero_point_vec);// Compute Scale of Feature map and save to resource map
QuantizeParams();// Quantize params
MergeBlobScale();// Merge Blob Scale of some layers
calibration.Serialize(output_name + ".quantized.tnnproto", output_name + ".quantized.tnnmodel")
/*保存量化模型*/
其中range_per_channel_表示每个channel中的最大最小值:first(min),second(max)。
量化源码位置在:
tools/quantization。
5.3 feature map量化
5.3.1 range_per_channel_的计算
按per_channel的方式对所有feature map(包括input/output)的channel计算最大最小值:
// tools/quantization/scale_calculator.cc --> ScaleCalculator::UpdateRange()
// Collect the Range of Feature map
// 在这里也叫 blob
int batch = origin_blob_->GetBlobDesc().dims[0];// 1
int channel = origin_blob_->GetBlobDesc().dims[1];// 3
int hxw = DimsVectorUtils::Count(origin_blob_->GetBlobDesc().dims, 2);// 224*224
float* data_ptr = reinterpret_cast<float*>(static_cast<char*>(origin_blob_->GetHandle().base) +
origin_blob_->GetHandle().bytes_offset);
for (int b = 0; b < batch; ++b) {
for (int c = 0; c < channel; ++c) {
int channel_idx = c;
if (merge_channel_) {
channel_idx = 0;
}
float* p = data_ptr + b * channel * hxw + c * hxw;
for (int i = 0; i < hxw; ++i) {
float val = p[i];
if (val < range_per_channel_[channel_idx].first) {
range_per_channel_[channel_idx].first = val;//first记录当前channel中的最小值
}
if (val > range_per_channel_[channel_idx].second) {
range_per_channel_[channel_idx].second = val;//second记录当前channel中的最大值
}
}
}
}
5.3.2 interval_per_channel_的计算
// tools/quantization/scale_calculator.cc --> ScaleCalculator::ResetDistribute()
for (unsigned int i = 0; i < interval_per_channel_.size(); ++i) {
float max_val = std::max(std::abs(range_per_channel_[i].first), std::abs(range_per_channel_[i].second));
valid_channel_[i] = max_val > 0.00001;
if (valid_channel_[i]) {
// bin_nums_ 默认值为 2048
interval_per_channel_[i] = (float)bin_nums_ / max_val;
}
}
5.3.3 distribute_per_channel_的计算
这里涉及到feature map的MIN_MAX和KL_DIVERGENCE两种量化策略,目的都是为了寻找一个合适的阈值threshold。
MIN_MAX量化策略:
// tools/quantization/scale_calculator.cc --> ScaleCalculator::CalculateScalePerDis
const int target_bin_nums = 128;
int threshold = target_bin_nums;
threshold = bin_nums_ - 1;// 2047
output = ((float)threshold + 0.5) / interval / 127.0;
总结起来就是:scale = max[abs(r_min), abs(r_max)] / 127.0,同NVIDIA报告中给出的一致,如下图所示:

KL_DIVERGENCE量化策略:
// tools/quantization/scale_calculator.cc --> ScaleCalculator::CalculateScalePerDis
const int target_bin_nums = 128;
int threshold = target_bin_nums;
// normalize
float sum = 0;
std::for_each(distribute.begin(), distribute.end(), [&](float n) { sum += n; });
std::for_each(distribute.begin(), distribute.end(), [sum](float& n) { n /= sum; });
float kl_val_min = 1e6;
float sum_after_threshold = 0.0f;
std::for_each(distribute.begin() + target_bin_nums, distribute.end(),
[&](float n) { sum_after_threshold += n; });
for (int i = target_bin_nums; i < bin_nums_; ++i) {
// 1. get referenced distribute
std::vector<float> distribute_ref(i);
std::copy(distribute.begin(), distribute.begin() + i, distribute_ref.begin());
distribute_ref[i - 1] += sum_after_threshold;
sum_after_threshold -= distribute[i]; // for next loop
// 2. quantize the distribute within threshold scope as target bins
std::vector<float> distribute_quantized(target_bin_nums);
const float bin_interval = (float)i / (float)target_bin_nums;
for (int j = 0; j < target_bin_nums; ++j) {
const float start = j * bin_interval;
const float end = start + bin_interval;
const int left_upper = static_cast<int>(std::ceil(start));
if (left_upper > start) {
const float left_scale = left_upper - start;
distribute_quantized[j] += left_scale * distribute[left_upper - 1];
}
const int right_lower = static_cast<int>(std::floor(end));
if (right_lower < end) {
const float right_scale = end - right_lower;
distribute_quantized[j] += right_scale * distribute[right_lower];
}
std::for_each(distribute.begin() + left_upper, distribute.begin() + right_lower,
[&](float n) { distribute_quantized[j] += n; });
}
// 3. expand target bins to i bins to calculate kl
std::vector<float> distribute_expanded(i);
for (int j = 0; j < target_bin_nums; ++j) {
const float start = j * bin_interval;
const float end = start + bin_interval;
float count = 0;
const int left_upper = static_cast<int>(std::ceil(start));
float left_scale = 0.0f;
if (left_upper > start) {
left_scale = left_upper - start;
if (distribute[left_upper - 1] != 0) {
count += left_scale;
}
}
const int right_lower = static_cast<int>(std::floor(end));
float right_scale = 0.0f;
if (right_lower < end) {
right_scale = end - right_lower;
if (distribute[right_lower] != 0) {
count += right_scale;
}
}
std::for_each(distribute.begin() + left_upper, distribute.begin() + right_lower, [&](float n) {
if (n != 0) {
count += 1;
}
});
if (count == 0) {
continue;
}
const float to_expand_val = distribute_quantized[j] / count;
if (left_upper > start && distribute[left_upper - 1] != 0) {
distribute_expanded[left_upper - 1] += to_expand_val * left_scale;
}
if (right_lower < end && distribute[right_lower] != 0) {
distribute_expanded[right_lower] += to_expand_val * right_scale;
}
for (int k = left_upper; k < right_lower; ++k) {
if (distribute[k] != 0) {
distribute_expanded[k] += to_expand_val;
}
}
}
// 4. calculate kl val
const float kl_val_cur = KlDivergence(distribute_ref, distribute_expanded);
// 5. get the threshold of min kl val
if (kl_val_cur < kl_val_min) {
kl_val_min = kl_val_cur;
threshold = i;
}
}
output = ((float)threshold + 0.5) / interval / 127.0;
5.3.4 scale的计算与存储
feature map的scale相关信息也会存储在LayerResource对象中,相较于卷积层的LayerResource来说,这里是blob数据,对应resource_map中的名字为xxx_scale_data_,具体为:
val.resize(valid_channel_.size());
std::fill(val.begin(), val.end(), 0.0f);
for (unsigned int c = 0; c < range_per_channel_.size(); ++c) {
int ret = -1;
ret = CalculateScalePerDis(distribute_per_channel_[c], interval_per_channel_[c], val[c]);
}
// val存储的就是CalculateScalePerDis计算出的output,也即是feature map的scale
// tools/quantization/calibration.cc --> Calibration::CalBlobScale()
// 将scale_vec和zero_point_vec写入net_resource->resource_map中
LayerResource* blob_scale_res;
blob_scale_res = CreateIntScale(scale_vec, zero_point_vec);
net_resource->resource_map[input_scale_name] = std::shared_ptr<LayerResource>(blob_scale_res);
// input_scale_name: xxx_scale_data_
// tools/quantization/calibration.cc --> Calibration::CreateIntScale()
IntScaleResource* int8scale = new IntScaleResource();
// scale
RawBuffer scale(scale_vec.size() * sizeof(float));
float* k_data = scale.force_to<float*>();
memcpy(k_data, scale_vec.data(), scale_vec.size() * sizeof(float));
int8scale->scale_handle = scale;
// zero_point
RawBuffer zero_point(zero_point_vec.size() * sizeof(char));
zero_point.SetDataType(DATA_TYPE_INT8);
int8_t* sb_data = zero_point.force_to<int8_t*>();
memcpy(sb_data, zero_point_vec.data(), zero_point_vec.size() * sizeof(char));
int8scale->zero_point_handle = zero_point;
// bias
RawBuffer bias(scale_vec.size() * sizeof(int32_t));
bias.SetDataType(DATA_TYPE_INT32);
int32_t* b_data = bias.force_to<int32_t*>();
memset(b_data, 0, scale_vec.size() * sizeof(int32_t));
int8scale->bias_handle = bias;
5.4 weight量化
5.4.1 前处理
在权重量化之前,先将weight乘以输入feature map的scale,具体为:
// tools/quantization/calibration.cc --> Calibration::QuantizeConvParams()
std::vector<float> weight_multiby_inputscale(size);
// multi weights by input_scale
// input_scale就是上面feature map的scale
float* input_scale_data = input_scale->scale_handle.force_to<float*>();
auto filter_handle = resource->filter_handle;
float* weight_data = filter_handle.force_to<float*>();
// conv(32, 3, 3, 3)
for (int group_idx = 0; group_idx < group; group_idx++) { // 1
for (int oc = 0; oc < output_channel_per_group; ++oc) { // 32
for (int ic = 0; ic < input_channel_per_group; ++ic) { // 3
int s_idx = ic + group_idx * input_channel_per_group;
for (int i = 0; i < kernel_size; ++i) { // 3*3
int idx = (group_idx * output_channel_per_group + oc) * oc_stride + ic * kernel_size + i;
if (is_depthwise) {
weight_multiby_inputscale[idx] = weight_data[idx];
} else {
weight_multiby_inputscale[idx] = weight_data[idx] * input_scale_data[s_idx];
}
}
}
}
}
5.4.2 weight量化策略
TNN中的卷积量化有两种:MIN_MAX量化策略和ADMM量化策略。
MIN_MAX量化策略:
// tools/quantization/calibration.cc --> Calibration::CalQuantizedWeights()
// MIN_MAX
int weight_scale_count = merge_channel ? 1 : output_channel;
int s_size = size / weight_scale_count;// 32*3*3*3 / 32
for (int s_idx = 0; s_idx < weight_scale_count; ++s_idx) {
const float* weight_start = weights + s_idx * s_size;
int8_t* weight_q_start = quantized_weights + s_idx * s_size;
auto minmax = std::minmax_element(weight_start, weight_start + s_size);
float max_val_abs = std::max(std::abs(*minmax.first), std::abs(*minmax.second));
weight_scale[s_idx] = max_val_abs / 127.0f;
float scale_float2int8 = 1.0f;
if (max_val_abs != 0)
scale_float2int8 = 1 / weight_scale[s_idx];
// quantize weights
for (int i = 0; i < s_size; ++i) {
int value = static_cast<int>(std::round(weight_start[i] * scale_float2int8));
weight_q_start[i] = std::min(127, std::max(-127, value));
}
}
MIN_MAX量化策略总结起来就是:weight_int8 = (weight_float * input_scale) / max_val_abs * 127,得到的weight_int8 的取值范围为[-127, 127]。
ADMM量化策略如下:
// tools/quantization/calibration.cc --> Calibration::CalQuantizedWeights()
// ADMM
int weight_scale_count = merge_channel ? 1 : output_channel;
int s_size = size / weight_scale_count;
const int quantize_bits = 8;
InitWeightScaleADMM(weights, size, output_channel, merge_channel, weight_scale, quantize_bits);
int iter = 0;
float pre_sum = 0;
float cur_sum = 0;
const int max_iter = 1000;
for (int i = 0; i < size; i++) {
pre_sum += std::fabs(weights[i]);
}
// update weights quan
while (iter < max_iter) {
UpdateQuantizedWeightsADMM(weights, size, output_channel, merge_channel, weight_scale, quantize_bits,
quantized_weights);
UpdateAlphaADMM(weights, size, output_channel, merge_channel, weight_scale, quantized_weights);
iter++;
}
for (int i = 0; i < size; i++) {
cur_sum += std::fabs(quantized_weights[i] * weight_scale[i / s_size]);
}
5.4.3 scale存储
对量化后的卷积weight,scale和zero_point保存到当前layer的resource中:
// weight_quantized 对应上述的 quantized_weights(weight_quantized_data) int8_t
// weight_scale 对应上述的 weight_scale(weight_scale_data) float
// weight_zero_point 对应上述的 weight_zero_point(weight_zero_point_data) int8_t
resource->filter_handle = weight_quantized;
resource->scale_handle = weight_scale;
resource->zero_point_handle = weight_zero_point;
5.5 bias量化
bias的量化结果为浮点bias除以weight的scale:
// tools/quantization/calibration.cc
auto fp32_bias_handle = ConvertHalfHandle(resource->bias_handle);
float* bias_data = fp32_bias_handle.force_to<float*>();
RawBuffer bias_quantized(output_channel * sizeof(int32_t));
bias_quantized.SetDataType(DATA_TYPE_INT32);
int32_t* bias_quantized_data = bias_quantized.force_to<int32_t*>();
for (int oc = 0; oc < output_channel; ++oc) {
if (weight_scale_data[oc] == 0) {
bias_quantized_data[oc] = 0;
} else {
int weight_scale_idx = oc;
bias_quantized_data[oc] = static_cast<int32_t>(bias_data[oc] / weight_scale_data[weight_scale_idx]);
}
}
resource->bias_handle = bias_quantized;
5.6 8bit推理过程
假设当前一个卷积层的信息为:
# input: (1, 3, 224, 224)
# conv: (32, 3, 3, 3)
# output: (1, 32, 222, 222)
结合x86和arm上8bit卷积推理,做了以下总结:
const float *w_scale = conv_res->scale_handle.force_to<float *>();
const float *o_scale =
reinterpret_cast<BlobInt8 *>(outputs[0])->GetIntResource()->scale_handle.force_to<float *>();
RawBuffer temp_buffer(total_byte_size);// 32个数 128字节
float *temp_ptr = temp_buffer.force_to<float *>();
for (int i = 0; i < dims_output[1]; i++) {
int scale_idx_w = scale_len_w == 1 ? 0 : i;
int scale_idx_o = scale_len_o == 1 ? 0 : i;
temp_ptr[i] = w_scale[scale_idx_w] / o_scale[scale_idx_o];
}
// source/tnn/device/arm/acc/compute/compute_int8.cc
// ARM
dstTemp[j] += (int32_t)src_z[i] * (int32_t)weight_j[i];
auto res = static_cast<float>(dstTemp[j] + bias[j]) * scale[j];
dst_x[j] = float2int8(res);
总结起来就是 (input_data_int32 * weight_data_int32 + bias) * weight_scale可以得到卷积的浮点输出,浮点输出 / output_scale(也就是下一个layer的input_scale)得到卷积的量化输出,再将其限制在[-128. 127]。
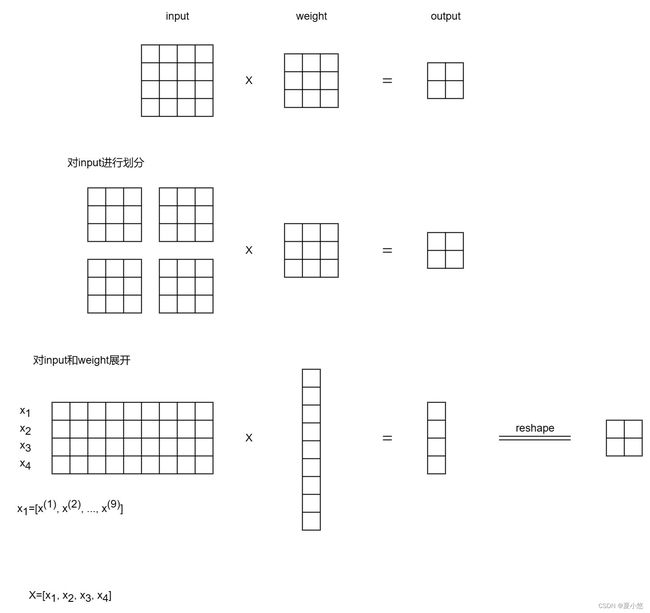
6. im2col实现卷积计算
根据硬件具体实现,大部分卷积的计算都会转换为矩阵乘法(GEMM),最常用的方法就是im2col,下面给出一些im2col实现卷积计算的示例图,结合这篇博客一起食用效果更佳!
6.1 input为单通道,weight为单通道(输出)
6.2 input为多通道,weight为单通道(输出)
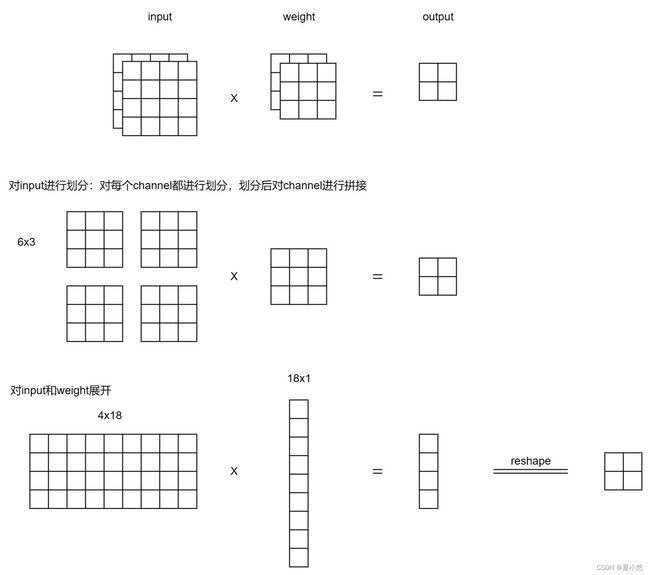
6.3 input为多通道,weight为多通道(输出)

结束语
本篇博客主要介绍了TNN的基本使用、量化工具的使用以及手动实现单算子卷积推理,除了浮点卷积推理外,8bit定点卷积推理也有实现,不过目前的结果还没有对上,后续再进行补充8bit定点卷积推理的实现代码。