31线性变换及其矩阵
一、线性变换的概念
一个线性变换 T T T 将空间 V V V 中的所有向量变换成 T ( v ) T(\bold v) T(v),如果这种变换任意想来给你 w \bold w w v \bold v v 满足以下条件,那么它是一个线性变换。
- T ( v + w ) = T ( v ) + T ( w ) T(\bold v+w)=T(\bold v)+T(\bold w) T(v+w)=T(v)+T(w)
- T ( c v ) = c T ( v ) T(c\bold v)=cT(\bold v) T(cv)=cT(v)
当然我们也可以将条件写成一个:
T ( c v + d w ) = c T ( v ) + d T ( w ) (1) T(c\bold v+d\bold w)=cT(\bold v)+dT(\bold w)\tag{1} T(cv+dw)=cT(v)+dT(w)(1)
变换是映射,它将一个事物对应成另一个事物,在所有映射中,满足线性条件的映射叫做线性变换。来几个对线性变换的感性认识:
平移变换(Shift transformation) 不是一个线性变换 T T T:输入向量叠加上一个固定向量 u 0 \bold u_0 u0 。根据概念,它不是一个线性变换,因为 ( 1 ) (1) (1) 的左边:
T ( c v + d w ) = c v + d w + u 0 T(c\bold v+d\bold w)=c\bold v+d\bold w+\bold u_0 T(cv+dw)=cv+dw+u0
右边:
T ( c v ) + T ( d w ) = c w + d v + 2 u 0 T(c\bold v)+T(d\bold w)=c\bold w+d\bold v+2\bold u_0 T(cv)+T(dw)=cw+dv+2u0
也就是:
T ( c v + d w ) ≠ T ( c v ) + T ( d w ) T(c\bold v+d\bold w)\ne T(c\bold v)+T(d\bold w) T(cv+dw)=T(cv)+T(dw)
当然如果 u 0 = 0 \bold u_0=\bold 0 u0=0,也是一个线性变换,这种变换叫做单位变换(Identity transformation)。
矩阵乘法是一个线性变换 T T T :输入向量左乘一个固定矩阵 A A A。根据概念,左边 T ( c v + d w ) = c A v + d A w = T ( c v + d w ) T(c\bold v+d\bold w)=cA\bold v+dA\bold w=T(c\bold v+d\bold w) T(cv+dw)=cAv+dAw=T(cv+dw)
仿射变换(Affine transformation)不是一个线性变换 T: A v + u 0 A\bold v+\bold u_0 Av+u0。
二、更多例子
2.1 选择一个固定向量 a = ( 1 , 3 , 4 ) \bold a=(1,3,4) a=(1,3,4),让变换为 T ( v ) T(\bold v) T(v) : a ⋅ v \bold a\cdot \bold v a⋅v
它是一个线性变换。假设输入向量是 v = ( v 1 , v 2 , v 3 ) \bold v=(v_1,v_2,v_3) v=(v1,v2,v3)。可以看出输入向量是一个属于 R 3 R^3 R3 空间,但是其结果是一个数,也就是 R 1 R^1 R1 空间,它相当于左乘了一个矩阵 A = [ 1 , 3 , 4 ] A=[1,3,4] A=[1,3,4],前面讨论过,左乘一个矩阵是一个线性变换。
2.2 变换为取模 T ( v ) = ∣ ∣ v ∣ ∣ T(\bold v)=||v|| T(v)=∣∣v∣∣
它不是一个线性变换。因为既不满足 ∣ ∣ v + w ∣ ∣ = ∣ ∣ v ∣ ∣ + ∣ ∣ w ∣ ∣ ||v+w||=||v||+||w|| ∣∣v+w∣∣=∣∣v∣∣+∣∣w∣∣ ,也不满足 ∣ ∣ − v ∣ ∣ = − ∣ ∣ v ∣ ∣ ||-v||= -||v|| ∣∣−v∣∣=−∣∣v∣∣ 。
2.3 变换为 T ( v ) T(v) T(v) 每个向量都旋转 30 30 30 度
旋转可以用一个矩阵来表示,属于左乘一个矩阵的情况,故为线性变换。
2.4 线到线,三角到三角的线性变换在图形上的特点
如果我们把这些向量用图形表示出来,比如在直线上:
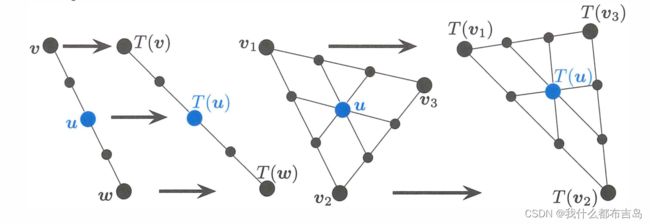
上图,向量 u = 0.5 ( v + w ) \bold u=0.5(\bold v+\bold w) u=0.5(v+w),如果进行了线性变换,那么变换前后各点的距离相等关系是不变的。同理对于 R 2 R^2 R2空间的三个向量, 重心公式为: u = 1 / 3 ( v 1 + v 2 + v 3 ) \bold u=1/3(\bold v_1+\bold v_2+\bold v_3) u=1/3(v1+v2+v3) 经过线性变换后距离相等公式不变,且重心公式 1 / 3 ( T ( v 1 ) + T ( v 2 ) + T ( v 3 ) ) 1/3(T(\bold v_1)+T(\bold v_2)+T(\bold v_3)) 1/3(T(v1)+T(v2)+T(v3))。
2.5 T: R 3 → R 2 R^3\rightarrow R^2 R3→R2
T ( v ) = A v T(v)=Av T(v)=Av
输入向量 v ∈ R 3 v\in R^3 v∈R3,也就是说矩阵 A A A 必须为一个 2 × 3 2\times3 2×3 的矩阵,输出向量是一个在 R 2 R^2 R2的矩阵。事实上,所有线性变换都可以用一个矩阵来表示。
三、线性变换的矩阵表达
结论:所有线性变换都可以通过一个矩阵来表示。
给定输入向量 v v v 及其所属空间:
| 向量名称 | 空间名称 | 空间维数 |
|---|---|---|
| v v v | V V V | R n R^{n} Rn |
| T ( v ) T(v) T(v) or w w w | W W W | R m R^{m} Rm |
我们的目标:找到线性变换对应的找到一个矩阵 A A A ,使得输入向量都能很轻松的通过左乘 A A A 获得到输出向量。也就是是
w = A v w=Av w=Av
OK!我们来看看这个对应的矩阵与什么有关:
- 输入输出向量维数使得矩阵的尺寸必须是 m × n m\times n m×n,也就是输出维数乘以输入维数;
- 表示输入向量的基和输出向量的基
为什么选择不同的基会影响我们的线性变换矩阵?答:选择不同的基对应的坐标值就会不同,如果坐标值改变了,那么相应的矩阵也会做相应的更改。输入向量 v v v:
v = c 1 v 1 + c 2 v 2 + ⋯ + c n v n v=c_1v_1+c_2v_2+\cdots+c_nv_n v=c1v1+c2v2+⋯+cnvn
根据线性变换性质有:
T ( v ) = c 1 T ( v 1 ) + c 2 T ( v 2 ) + ⋯ + c n T ( v n ) T(v)=c_1T(v_1)+c_2T(v_2)+\cdots+c_nT(v_n) T(v)=c1T(v1)+c2T(v2)+⋯+cnT(vn)
经过线性变换后的线性“新”基,表示了新空间 W W W的向量 w = T ( v ) w=T(v) w=T(v)。对于这个向量 w w w 除了可以用线性新基表示,还可以是另外一组基如: w 1 , w 2 , ⋯ , w m w_1,w_2,\cdots,w_m w1,w2,⋯,wm。也就是:
c 1 T ( v 1 ) + c 2 T ( v 2 ) + ⋯ + c n T ( v n ) = d 1 w 1 + d 2 w 2 + ⋯ + d n w m c_1T(v_1)+c_2T(v_2)+\cdots+c_nT(v_n)=d_1w_1+d_2w_2+\cdots+d_nw_m c1T(v1)+c2T(v2)+⋯+cnT(vn)=d1w1+d2w2+⋯+dnwm
写成矩阵形式:
[ T ( v 1 ) T ( v 2 ) ⋯ T ( v n ) ] C = [ w 1 w 2 ⋯ w m ] D T V C = W D \begin{aligned} \begin{bmatrix}T(v_1)&T(v_2)&\cdots&T(v_n)\end{bmatrix}C&=\begin{bmatrix}w_1&w_2\cdots&w_m\end{bmatrix}D\\ T_VC&=WD \end{aligned} [T(v1)T(v2)⋯T(vn)]CTVC=[w1w2⋯wm]D=WD
我们要求的矩阵是: A = T V W − 1 A=T_VW^{-1} A=TVW−1。
例子:输入基为: 1 , x , x 2 , x 3 1,x,x^2,x^3 1,x,x2,x3 ,其线性变换 T T T 是微分,对应输出基为 1 , x , x 2 1,x,x^2 1,x,x2。
设完成这个转换的矩阵为 A A A,我们按列写出这个矩阵。步骤是,取输入基,进行进行线性变换, T ( 1 ) = 0 T(1)=0 T(1)=0,对应的输出基没有可以表示这个的基,故为 [ 0 0 0 ] \begin{bmatrix}0\\0\\0\end{bmatrix} 000 ,输入基第二个 T ( x ) = 1 T(x)=1 T(x)=1,输出基线性表示为 [ 1 0 0 ] \begin{bmatrix}1\\0\\0\end{bmatrix} 100 ,同理有: [ 0 2 0 ] \begin{bmatrix}0\\2\\0\end{bmatrix} 020 [ 0 0 3 ] \begin{bmatrix}0\\0\\3\end{bmatrix} 003 ,所以所求的矩阵为:
A = [ 0 1 0 0 0 0 2 0 0 0 0 3 ] A=\begin{bmatrix}0&1&0&0\\0&0&2&0\\0&0&0&3\end{bmatrix} A= 000100020003
如果已知输入基的坐标为 C = [ c 1 c 2 c 3 c 4 ] C=\begin{bmatrix}c_1\\c_2\\c_3\\c_4\end{bmatrix} C= c1c2c3c4 ,那么输出的系数可以轻松得到:
A C = [ c 2 2 c 3 3 c 3 ] AC=\begin{bmatrix}c_2\\2c_3\\3c_3\end{bmatrix} AC= c22c33c3