【图-注意力笔记,篇章1】Graph Transformer:包括Graph Transformer 的了解与回顾且其与GNN、Transformer的关联
一份PPT带你快速了解Graph Transformer:包括Graph Transformer 的简要回顾且其与GNN、Transformer的关联
- GNN、Transformer与Graph Transformer的关系?
-
- GNN与Transformer的关系
-
- 1. 从连接结构的角度看
- 2.从公式的角度看
-
- ⋅ \cdot ⋅ Transformer的简单介绍
- ⋅ \cdot ⋅ 简单地介绍一下GNN
- ⋅ \cdot ⋅ GNN与Transformer的公式对比
- Graph Transformer是什么 & 关联?
-
- 1. Graph Transformer是什么
- 2. Graph Transformer与GAT, Transformer之间的区别/关联
- 3. 为什么会有Graph Transformer
-
- ⋅ \cdot ⋅ 相对GNN、GAT的优缺点对比
- ⋅ \cdot ⋅ 相对Transformer的优缺点对比
- Graph Transformer的简单回顾
-
- 早期的Graph Transformer
- 早期Graph Transformer的进阶1
- 早期Graph Transformer的进阶2
- 两篇经典Graph Transformer来入门之预告版
- 好文推荐及相关参考链接
说明:本文仅供学习,未经同意请勿转载
笔记时间:2022年08月
博客公开时间:2023年2月27日
篇章1先从看看目前Graph注意力中比较火的方法吧,也就是Graph 与Transformer的结合。那Graph Tranformer与GNN和Transformer之间的区别与关联是怎么样的呢?下面让笔者我一一述来。(如果观点/理解存在不对的,欢迎指正。)
GNN、Transformer与Graph Transformer的关系?
在讲的Graph Transformer的相关论文前,我们先直观地来理解一下GNN与Transformer之间的关系是什么。
GNN与Transformer的关系

1. 从连接结构的角度看
我们知道Transformer最初是来源于NLP领域,其使用注意力机制来构建每个单词的特征,比如右上橙色图,找到句子中其他单词对前面当前单词的重要程度,基于此,Transformer就可以根据该重要程度,对其他所有单词进行加权的线性变换,以此更新当前单词的特征。从右上红色的单词关注来看,我们可以很清晰的明白,Transformer中,当前单词 关注其他所有 的单词,是一种全局的揽括,从图的角度上来看就是一种全连接的状态。
2.从公式的角度看
⋅ \cdot ⋅ Transformer的简单介绍
(对Transformer熟悉的可以直接跳过这一部分阅读)
Transformer的一大重点在于其利用Q(查询)= Q l H l Q^lH^l QlHl,K(键)= K l H l K^lH^l KlHl,V(键值)= V l H l V^lH^l VlHl,三个张量来构建注意力机制。结合上面结构的例子,从左边公式来看:就是用当前单词 h i l h_i^l hil作为查询值 Q h i l Qh_i^l Qhil【注意:这里一般需要通过 Q Q Q对 h i l h_i^l hil做一个线性变换才能得查询值 Q h i l Qh_i^l Qhil,比如我们要查询Transformer这篇文章,这篇文章的特征可能是[Attention,Transformer,NLP],但是我们做查询时输入可能就只有Transformer这个关键字,所以查询值并不是文章本身的特征】,来查询句子里单词对我的贡献是多少? 而其他单词的关键词(键)就是它们自身的特征 h j l , j ∈ S h_j^l, j \in S hjl,j∈S( 这里同样需要对关键词做线性变换得到键 K l h j l , j ∈ S K^lh_j^l, j \in S Klhjl,j∈S, 理由同上)。那怎么得到其他单词对当前单词的贡献(注意力分数)呢?可以从搜索引擎的角度上来理解:比如我们在搜索文献时,输入查询值(深度学习,Transformer),那么搜索系统会根据文章的关键词返回搜索结果。因此,实际上就是输入的查询值与文章的关键词的相似性计算,越相似的就会排在越前面,也就是贡献越大,重要程度越大。因此,我们可以通过关键词和查询值之间的点积得到注意力分数 w i j : = s o f t a m x j ( Q l h i l ⋅ K l h j l ) w_{ij} := softamx_j(Q^lh_i^l \cdot K^lh_j^l) wij:=softamxj(Qlhil⋅Klhjl)。当然搜索引擎还有会考虑文献自身的重要性,比如引用量/点击量,在相同注意力分数的情况下,应该把更好的文献排在前面。其中,文献的引用量,点击量等都可以看出文献本身的特征。因此,得到注意力分数之后,我们需要对对键值进行加权求和,才能得到与当前查询值更匹配的特征 h i l + 1 : = δ ( ∑ j ∈ S w i j ( V l h j l ) ) h_i^{l+1} := \delta(\sum_{j \in S}w_{ij}(V^lh_j^l)) hil+1:=δ(∑j∈Swij(Vlhjl))。
⋅ \cdot ⋅ 简单地介绍一下GNN
(对GNN熟悉的可以直接跳过这一部分阅读)
GNN和GCN们的重点就是它们考虑了数据结构本身的拓扑属性,可以处理非欧式空间数据。基于所构建Graph,GNN和GCN们可以通过 aggregate(聚合)邻居节点们 N ( i ) N(i) N(i)的特征 { h j l ∣ j ∈ N ( i ) } \{h_j^l | j \in N(i)\} {hjl∣j∈N(i)}来更新当前的中心节点 i i i的特征 h i l h_i^l hil。除了考虑邻居节点的特征,自身本来的特征也是十分重要的(从社交网络的角度看,就是你不能只看群体关系,每个人自身本身也是一个独特的存在,哈哈),所以在更新节点特征的时候要同时考虑自身和邻居节点,即 h i l + 1 : = δ ( U l h i l + ∑ j ∈ N ( i ) , i ≠ j ( V l h j l ) ) h_i^{l+1} := \delta(U^lh_i^l + \sum_{j \in N(i), i \neq j}(V^lh_j^l)) hil+1:=δ(Ulhil+∑j∈N(i),i=j(Vlhjl))。比如紫色的图中,This节点可以通过聚合与它相连接的is,a , sentence, also的节点单词特征来更新This本自身的特征 (当然还有自环,上面的图没有画出来)。其他单词的更新也是如此。基于此,节点的特征就能够在整个图中进行传播。在现实中,我们的Graph一般不是全连接图,上面给出的示例仅是为跟Transformer对比。
⋅ \cdot ⋅ GNN与Transformer的公式对比
根据前面的介绍,GNN节点的更新 h i l + 1 : = δ ( U l h i l + ∑ j ∈ N ( i ) ( V l h j l ) ) h_i^{l+1} := \delta(U^lh_i^l + \sum_{j \in N(i)}(V^lh_j^l)) hil+1:=δ(Ulhil+∑j∈N(i)(Vlhjl))实际上整理一下就可以变成 h i l + 1 : = δ ( ∑ j ∈ { N ( i ) , i } ( A l h j l ) ) = δ ( ∑ j ∈ S = { N ( i ) , i } ( A l h j l ) ) h_i^{l+1} := \delta(\sum_{j \in \{N(i), i\} }(A^lh_j^l)) = {\delta(\sum_{j \in S = \{N(i), i\} }(A^lh_j^l)) } hil+1:=δ(∑j∈{N(i),i}(Alhjl))=δ(∑j∈S={N(i),i}(Alhjl))。同样,Transformer的公式整理一下也可以变成 h i l + 1 : = δ ( ∑ j ∈ S ( A l h j l ) ) h_i^{l+1} := \delta(\sum_{j \in S}(A^lh_j^l)) hil+1:=δ(∑j∈S(Alhjl))。因此,两者公式实际上是类似的。当Graph是全连接图时,那么GNN的节点公式实际上等同于Transformer的节点公式(因为Transformer关注每一个单词对当前单词的影响)。因此,Transformer实际上就是可以看成全连接的GAT。
Graph Transformer是什么 & 关联?
我们都知道Transformer实际上就是关注到全局的Attention,而且Transformer实际上就是可以看成全连接的GAT,那么Graph Transformer是什么?为什么会有Graph Transformer ? 它跟GAT的区别是什么?
1. Graph Transformer是什么
先简单的回答一下第一个问题,Graph Transformer实际上就是带图结构的Transformer,其近似于GAT。
2. Graph Transformer与GAT, Transformer之间的区别/关联
既然是近似,那Graph Transformer与GAT, Transformer之间的区别是什么?
从Attention机制的角度来简单的回答一下第三个问题。GAT们的self-attention只计算邻居节点,而Transformer们的self-attention会考虑所有的节点 。相对Graph Transformer的全连接图(稠密图),GAT中的Graph可以看成一种相对稀疏的图(不一定全连接)。对比于Transformer,Graph Transformer在Transformer的基础上引入图的拓扑结构属性,使模型有高维空间上的结构位置先验。因此,Graph Transformer结合了Transformer的核心(全局关注)和GNN的核心(考虑图的拓扑属性)。
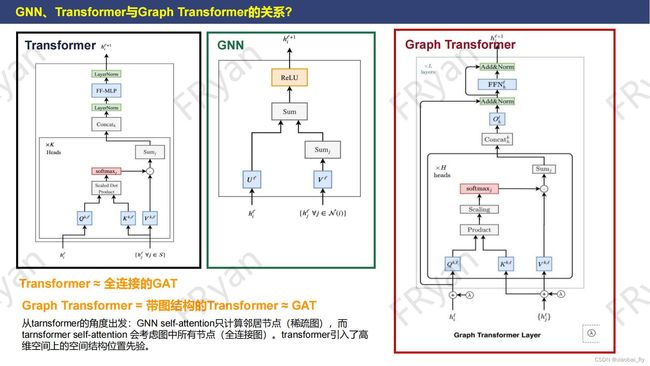
说明:上面PPT的三个结构图来源于论文《A Generalization of Transformer Networks to Graphs》 (DLG-AAAI 2021)
3. 为什么会有Graph Transformer
根据前面的介绍,我们知道Graph Transformer可以集合GNN和Transformer的核心优点,这也是为什么会有Graph Transformer的出现。存在必然有理,存在必有局限!下面简单介绍一下Graph Transformer存在的理由(带来的好处)和局限性。
⋅ \cdot ⋅ 相对GNN、GAT的优缺点对比
- 优点
- 相比GAT,Graph Transformer具有更大的表征的能力,在处理图形数据时能够捕获节点之间的复杂关系,而GAT则是使用了一种局部邻居聚合的方式。
- 相比GAT,Graph Transformer对于缺失节点和边的情况处理能力更强。
- 相比GNN,具有捕获长距离依赖的优点。
- 相比GNN,Transformer结构的引入可以缓解GNN中message passing引起的over-smoothing(过平滑)和over-squashing(过挤压)现象。(这个后面会简单介绍)
- 相比GNN,可以通过[CLS] token的利用去除/减少pooling function的使用。
- 相比GNN,Graph Transformer能够高效地处理大规模图形数据,包括超过数百万个节点和边的图形数据。这是由于Transformer模型的并行处理能力,以及Graph Transformer采用的自注意力机制,使得每个节点只需关注其邻居节点,而非整个图形。
- 缺点
- 相比GAT,Graph Transformer的局部关注能力相对较差些(但是后来基于Graph Transformer的研究改善了一局限,这也是最后一点优点罗列的原因)。
- 相比GNN,Graph Transformer由于模型复杂度高,需要大量的训练数据才能发挥其优势等原因,在处理简单的图形数据/小数据集时可能表现不如GNN。
- 相比GNN,Graph Transformer的性能高度依赖于图形结构的特征,如图形密度、大小、节点度数分布等。对于结构差异较大的图形数据,可能需要使用其他的图神经网络模型进行处理。
⋅ \cdot ⋅ 相对Transformer的优缺点对比
- 优点
- 相比Transformer,Graph Transformer引入了图的拓扑结构,可以结合GNN及其频域的信息(Laplacian PE)。比如频率上的图模型加Transformer。因此,Graph Transformer可以用于处理图形数据,而Transformer则更适用于序列数据。
- 相比Transformer,Graph Transformer在图形数据建模方面具有强大的表征能力,能够捕获节点之间的复杂关系(比如异构图Graph Transformer模型),并且能够处理不同类型的节点和边。
- 相比Transformer,Graph Transformer能够高效地处理大规模图形数据。
- 缺点
- 相较于Transformer,Graph Transformer在处理序列数据时可能表现不如Transformer。
- 相比Transformer/GNN,Graph Transformer的计算复杂度较高,需要较大的内存和计算资源来进行训练和推断。
Graph Transformer的简单回顾
简单地了解Graph Transformer的相关信息及优劣势后,下面笔者将简单的对当前Graph Transformer模型进行一个简单的回顾。
早期的Graph Transformer
早期的Graph Transformer = GNN concat Transformer
早期的Graph Transformer主要是类似于将GNN和Transformer级联起来(从右下角模型可以清楚看出)。比如下面两篇论文:【Self-Supervised Graph Transformer on Large-Scale Molecular Data (NeurIPS 2020)】和【GraphTrans:Representing Long-Range Context for Graph Neural Networks with Global Attention (NeurIPS 2021)】
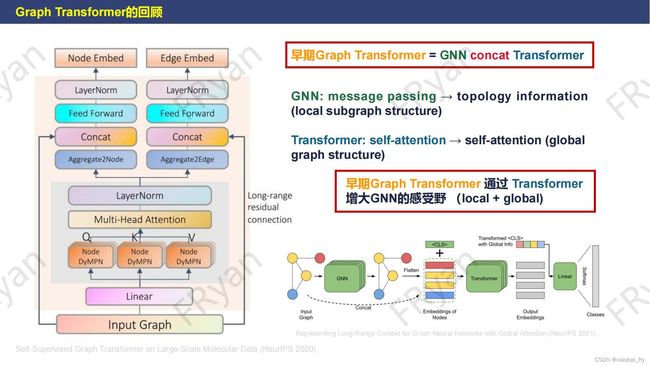 在GNN中,我们通过message passing (节点信息传播)可以捕获到图中的局部结构信息(local);而在Transformer中,我们可以通过因此将数据先通过self-attention获取全局信息(global)。为集合GNN和Transformer这两个优点,早期的Graph Transformer先经过GNN的message passing捕获节点的局部信息特征表征,基于此,进一步通过线性变换得到Transformer中Q,K,V。因此,此时的Q,K,V均带有局部结构(local subgraph structure)信息。最后,在Transformer的self-attention下获取global信息。综上,早期简单的Graph Transformer模型就诞生啦。
在GNN中,我们通过message passing (节点信息传播)可以捕获到图中的局部结构信息(local);而在Transformer中,我们可以通过因此将数据先通过self-attention获取全局信息(global)。为集合GNN和Transformer这两个优点,早期的Graph Transformer先经过GNN的message passing捕获节点的局部信息特征表征,基于此,进一步通过线性变换得到Transformer中Q,K,V。因此,此时的Q,K,V均带有局部结构(local subgraph structure)信息。最后,在Transformer的self-attention下获取global信息。综上,早期简单的Graph Transformer模型就诞生啦。
上面两篇论文模型值得关注的点:
(1)与大多数GNN类似,上图左边的Graph Transformer模型为了进一步防止 message passing 出现 over-smoothing 现象,将残差链接变成了 long-range residual connection(类似跳跃连接,JK-Net【论文链接】),也就是直接将原始特征接到后面。
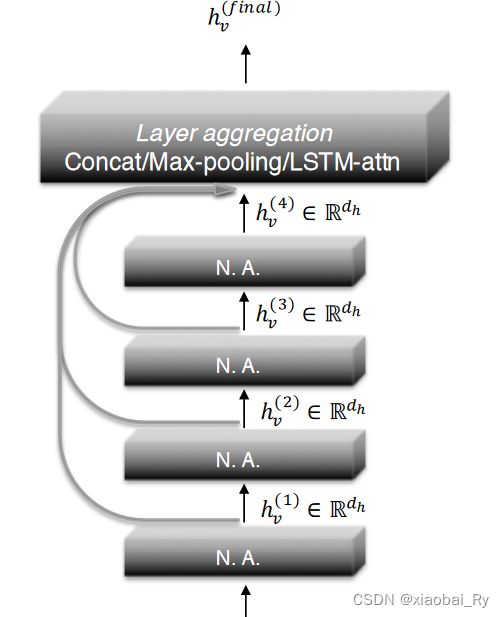
(2)上图右下角的GraphTrans模型提出了一种新的ReadOut机制。这种机制实际上就是NLP或者说VIT模型【论文链接】中的 [CLS] token。(VIT中[CLS] token的引入也同样来源于NLP)
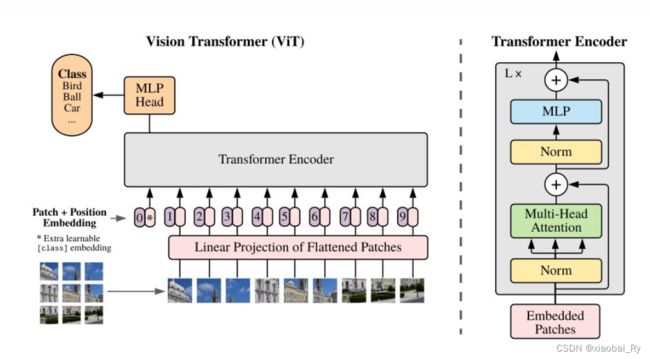
这种 [CLS] token的引入 跟Vision Transformer的构想是一样的,对Graph Transformer的学习是重要的。要知道Graph和图像一样应该是要具有排列不变性(permutation-invariant)的,比如Vision GNN【论文链接】。
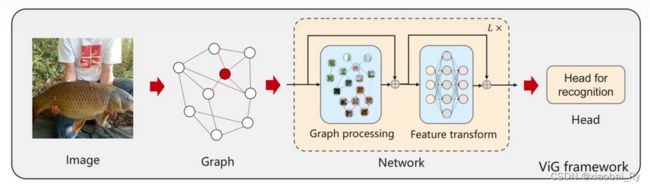
而且Graph比起图像的话,其对同阶节点的聚合的排列不变性应该是更加严格的。图像虽然说考虑排列不变性,但相比Graph的话,其位置还是有影响的(尤其是对分类/非目标检测问题的话)。但是如果像NLP中Transformer一样加上位置编码(PE) 可能就没有办法实现节点聚合的排列不变性了。因此,[CLS]的引入是值得关注的点。
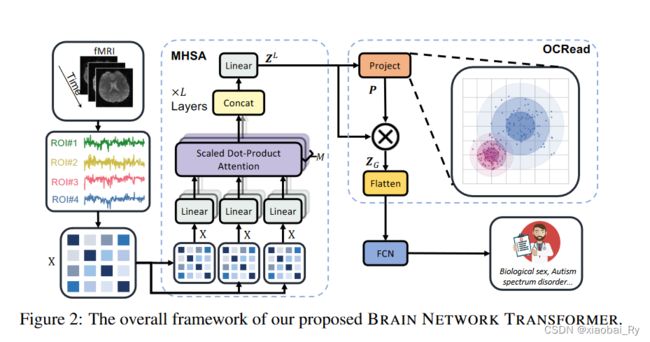
还有的研究是结合各种PE和最后用一个聚类的ReadOut来实现不同节点的关注,笔者感觉基于聚类/分类的ReadOut的机制跟上面[CLS]的引入是异曲同工之妙。比如Brain Network Transformer这篇论文 【论文链接】。
早期Graph Transformer的进阶1
早期Graph Transformer的进阶1:改善结构信息的关注
为了改善对局部结构信息的保留与学习(特别随着网络加深,这种局部结构的保留更少),下面Structure-Aware Transformer模型【论文链接】通过k-hop子图来保留更多的局部信息。虽然网络结构类似于前面的GraphTrans模型,但Structure-Aware Transformer是子图输入,使用PE,而GraphTrans是图输入,使用[CLS]。
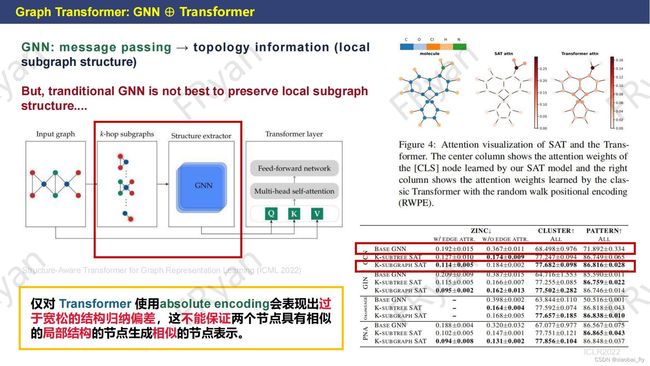 要知道,即使使用PE,Transformer 生成的节点表示不一定捕获节点之间的结构相似性(比如右上的可视化),而且其依赖于图结构特征的输入。因此,Structure-Aware Transformer在Transformer之前先利用子图来提取特征。这样子就可以融合子图的局部结构信息。也有比较多关于结构保留这方面研究的工作,如果感兴趣,可以自行检索阅读。
要知道,即使使用PE,Transformer 生成的节点表示不一定捕获节点之间的结构相似性(比如右上的可视化),而且其依赖于图结构特征的输入。因此,Structure-Aware Transformer在Transformer之前先利用子图来提取特征。这样子就可以融合子图的局部结构信息。也有比较多关于结构保留这方面研究的工作,如果感兴趣,可以自行检索阅读。
早期Graph Transformer的进阶2
早期Graph Transformer的进阶2:添加边/关系信息,考虑异构性
为了揽括更多丰富的信息,基于Graph Transformer的研究还引入了类似PE(位置编码)、RE(关系编码)、SE(结构编码)等的编码信息。这三种编码是笔者认为比较重要的。下面左边的论文【论文链接】引入边的特征,右上的论文是一篇引用在骨架【机器人,智能体形态】上的论文【论文链接】,使用了位置编码和关系编码,考虑了Graph结构中复杂的关系,下面的论文【论文链接】则是介绍了不同位置编码的方式及其影响。在笔者阅读的相关文献中,笔者发现多数的研究会把边特征和关系特征融合到attention机制里,以此来获取对复杂关系的关注与学习。
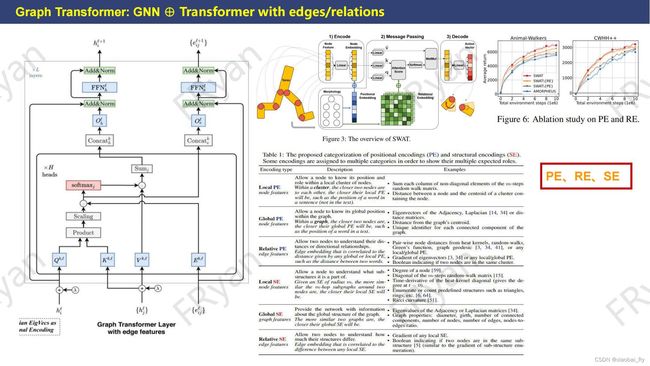 因此,从上面的PPT可以看出,实际上Graph Transformer的算法优化类似于Transformer的优化【如何设计更好,更有效的PE编码】/GNN的优化【如何假定更好的图,考虑异构性,考虑边特征等】,以及两者之间怎么更好的结合【如何利用结构信息、连接矩阵、关系来改善注意力机制】。
因此,从上面的PPT可以看出,实际上Graph Transformer的算法优化类似于Transformer的优化【如何设计更好,更有效的PE编码】/GNN的优化【如何假定更好的图,考虑异构性,考虑边特征等】,以及两者之间怎么更好的结合【如何利用结构信息、连接矩阵、关系来改善注意力机制】。
两篇经典Graph Transformer来入门之预告版
由于文章篇幅有点过长,对上述两篇文章的分享将在新的一期【图-注意力笔记,篇章2】中分享,这里先做个【图-注意力笔记,篇章2】笔记公开的预告吧。虽然这两篇文章思路非常清晰,介绍也相对比较简要,但是笔者认为是Graph Transformer中值得一读的经典文献吧。而且从论文本身的框架图就可以非常清楚的知道两者对GNN与Transformer的结合机制是不一样。
2023年3月2日已更新【图-注意力笔记,篇章2】Graphormer 和 GraphFormers论文笔记之两篇经典Graph Transformer来入门,点击上面可跳转。

好文推荐及相关参考链接
- 想要快速了解更多Graph Transformer的,建议可以读一下《一文带你浏览Graph Transformers 》博客
- 《Transformers是一种图神经网络 》