2.opencv图像处理常用操作
图像的平滑处理
平滑,也称 模糊, 平滑处理时需要用到一个滤波器 。滤波器想象成一个包含加权系数的窗口,这个加权系数也叫做核或者模版。
// 图像平滑处理分而学之.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
const int MAX_KERNEL_LENGTH = 31;
int _tmain(int argc, _TCHAR* argv[])
{
Mat img = imread("D:\\lenargb.jpg", 1);
if (img.empty())
{
cout << "无法读入图像" << endl;
return -1;
}
Mat dest;
#pragma region 归一化平滑
for (int i = 1; i < MAX_KERNEL_LENGTH; i++)
{
blur(img, dest, Size(i, i), Point(-1, -1));//size(i,i)内核大小,最小为(1,1);
imshow("归一化平滑图像", dest);
waitKey(100);
}
#pragma endregion
#pragma region 高斯平滑
for (int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2)
{
GaussianBlur(img, dest, Size(i, i), 0, 0);//size的两个参数必须都为正奇数,第四个参数是x方向的标准差,第五个参数是y方向的标准差,如果是0,表示从内核大小计算得到;
imshow("高斯平滑图像图像", dest);
waitKey(100);
}
#pragma endregion
#pragma region 中值平滑
for (int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2)
{
medianBlur(img, dest, i);//第三个参数为核的边长,必须为奇数,一般中值平滑用的都是正方形所以只用一个参数就好;
imshow("中值平滑", dest);
waitKey(100);
}
#pragma endregion
//waitKey(0);
return 0;
}图像阈值操作
为了从一副图像中提取出我们需要的部分,应该用图像中的每一个像素点的灰度值与选取的阈值进行比较,并作出相应的判断。
一旦找到了需要分割的物体的像素点,我们可以对这些像素点设定一些特定的值来表示。(例如:可以将该物体的像素点的灰度值设定为:‘0’(黑色),其他的像素点的灰度值为:‘255’(白色);
OpenCV中提供了阈值(threshold)函数 有五种类型
1. 二进制阈值化
先要选定一个特定的阈值量,比如:120,这样,新的阈值产生规则可以解释为大于120的像素点的灰度值设定为最大值(如8位灰度值最大为255),灰度值小于120的像素点的灰度值设定为0。
2. 反二进制阈值化
该阈值化与二进制阈值化相似,先选定一个特定的灰度值作为阈值,不过最后的设定值相反。
3. 截断阈值化
同样首先需要选定一个阈值,图像中大于该阈值的像素点被设定为该阈值,小于该阈值的保持不变
4. 阈值化为0
首先需要选定一个阈值,像素点的灰度值大于该阈值的不进行任何改变;2 像素点的灰度值小于该阈值的,其灰度值全部变为0
5. 反阈值化为0
原理类似于0阈值,但是在对图像做处理的时候相反,即:像素点的灰度值小于该阈值的不进行任何改变,而大于该阈值的部分,其灰度值全部变为0。
filter2D函数能够对图像按照模版进行滤波
// 基本阈值操作2.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
void respond(int, void*);
const char * window_name = "图片";
Mat src_gray;
Mat dst;
int threshhold_type = 5;
const int max_type = 5;
int threshhold_value = 0;
int max_value = 255;
int _tmain(int argc, _TCHAR* argv[])
{
namedWindow(window_name, WINDOW_AUTOSIZE);
Mat src = imread("E:\\code\\test\\image\\tiantan.png", 1);
if (src.empty())
{
cout << "无法正常载入图片" << endl; return -1;
}
//转换为灰度图;
cvtColor(src, src_gray, CV_RGB2GRAY);
imshow(window_name, src_gray);
createTrackbar("阈值类型", window_name, &threshhold_type, max_type, respond);
createTrackbar("阈值大小", window_name, &threshhold_value, max_value, respond);
waitKey(0);
return 0;
}
void respond(int, void*)
{
/* 0:二进制阈值 1: 反二进制阈值 2: 截断阈值 3: 0阈值 4: 反0阈值 5:原灰度图; */
if (threshhold_type==5)
{
imshow(window_name, src_gray);
}
else
{
threshold(src_gray, dst, threshhold_value, max_value, threshhold_type);
imshow(window_name, dst);
}
}实现自己的线性滤波器
OpenCV为我们提供了函数 filter2D ,来实现核卷积;
// 实现自己的滤波器2.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
void respond(int, void*);
const char * window_name = "实现自己的滤波器";
int value = 0;
Mat src,dst,kernel;
const int max_value = 100;
int _tmain(int argc, _TCHAR* argv[])
{
src = imread("E:\\code\\test\\image\\lena.png", 1);
if (src.data==NULL)
{
cout << "无法加载图片" << endl;
return -1;
}
namedWindow(window_name, WINDOW_AUTOSIZE);
imshow(window_name, src);
createTrackbar("核的大小", window_name, &value, max_value, respond);
while (true)
{
char c = waitKey(0);
if (c==27)
{
return 0;
}
}
return 0;
}
void respond(int, void*)
{
int kernel_size = 1 + value * 2;
kernel = Mat::ones(kernel_size, kernel_size, CV_32F)/(float)(kernel_size*kernel_size);
filter2D(src, dst, -1, kernel, Point(-1, -1));
imshow(window_name, dst);
}Sobel导数
Sobel 算子是一个离散微分算子 (discrete differentiation operator)。 它用来计算图像灰度函数的近似梯度。Sobel 算子结合了高斯平滑和微分求导。
// Sobel导数.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <stdlib.h>
#include <stdio.h>
using namespace cv;
/** @function main */
int main(int argc, char** argv)
{
Mat src, src_gray;
Mat grad;
char* window_name = "Sobel Demo - Simple Edge Detector";
int scale = 1;
int delta = 0;
int ddepth = CV_16S;
//int c;
/// 装载图像
src = imread("E://code//test//image//lena.png",1);
if (!src.data)
{
return -1;
}
GaussianBlur(src, src, Size(3, 3), 0, 0, BORDER_DEFAULT);
/// 创建显示窗口
namedWindow(window_name, CV_WINDOW_AUTOSIZE);
imshow(window_name, src);
waitKey(3000);
/// 转换为灰度图
cvtColor(src, src_gray, CV_RGB2GRAY);
imshow(window_name, src_gray);
waitKey(3000);
/// 创建 grad_x 和 grad_y 矩阵
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y;
/// 求 X方向梯度
Scharr( src_gray, grad_x, ddepth, 1, 0, scale, delta, BORDER_DEFAULT );
//Sobel(src_gray, grad_x, ddepth, 1, 0, 3, scale, delta, BORDER_DEFAULT);
convertScaleAbs(grad_x, abs_grad_x);
/// 求Y方向梯度
Scharr( src_gray, grad_y, ddepth, 0, 1, scale, delta, BORDER_DEFAULT );
//Sobel(src_gray, grad_y, ddepth, 0, 1, 3, scale, delta, BORDER_DEFAULT);
convertScaleAbs(grad_y, abs_grad_y);
/// 合并梯度(近似)
addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad);
imshow(window_name, grad);
waitKey(0);
return 0;
}//其实不简单也没有关系,因为只是相对大小,在图像的对比中,依然能够找到边界;
Laplace 算子
一阶导数的极值位置,二阶导数为0。所以我们也可以用这个特点来作为检测图像边缘的方法。 但是, 二阶导数的0值不仅仅出现在边缘(它们也可能出现在无意义的位置),但是我们可以过滤掉这些点。
实际上,由于 Laplacian使用了图像梯度,它内部调用了 Sobel 算子。
// Laplace算子.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <stdlib.h>
#include <stdio.h>
using namespace cv;
/** @函数 main */
int main(int argc, char** argv)
{
Mat src, src_gray, dst;
int kernel_size = 3;
int scale = 1;
int delta = 0;
int ddepth = CV_16S;
char* window_name = "Laplace Demo";
int c;
/// 装载图像
src = imread("E://code//test//image//lena.png", 1);
if (!src.data)
{
return -1;
}
/// 使用高斯滤波消除噪声
GaussianBlur(src, src, Size(3, 3), 0, 0, BORDER_DEFAULT);
/// 转换为灰度图
cvtColor(src, src_gray, CV_RGB2GRAY);
/// 创建显示窗口
namedWindow(window_name, CV_WINDOW_AUTOSIZE);
imshow(window_name, src);
waitKey(2000);
imshow(window_name, src_gray);
waitKey(3000);
/// 使用Laplace函数
Mat abs_dst;
Laplacian(src_gray, dst, ddepth, kernel_size, scale, delta, BORDER_DEFAULT);
//ddepth: 输出图像的深度。 因为输入图像的深度是 CV_8U ,这里我们必须定义 ddepth = CV_16S 以避免外溢。
//下面大概求绝对值;
convertScaleAbs(dst, abs_dst);
/// 显示结果
imshow(window_name, abs_dst);
waitKey(0);
return 0;
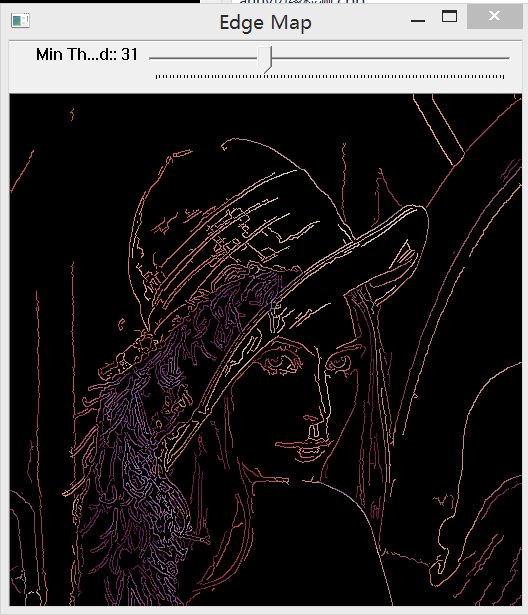
}Canny 边缘检测
步骤
1. 消除噪声。 使用高斯平滑滤波器卷积降噪。
2. 计算梯度幅值和方向。 此处,使用Sobel滤波器
3. 非极大值 抑制。 这一步排除非边缘像素, 仅仅保留了一些细线条(候选边缘)。
4. 滞后阈值: 最后一步,Canny 使用了滞后阈值,滞后阈值需要两个阈值(高阈值和低阈值): Canny 推荐的 高:低 阈值比在 2:1 到3:1之间。
// Canny边缘检测.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <stdlib.h>
#include <stdio.h>
using namespace cv;
/// 全局变量
Mat src, src_gray;
Mat dst, detected_edges;
//int edgeThresh = 1;
int lowThreshold=1;
int const max_lowThreshold = 100;
int ratio = 3;
int kernel_size = 3;
char* window_name = "Edge Map";
/** * @函数 CannyThreshold * @简介: trackbar 交互回调 - Canny阈值输入比例1:3 */
void CannyThreshold(int, void*)
{
/// 使用 3x3内核降噪
blur(src_gray, detected_edges, Size(3, 3));
/// 运行Canny算子
Canny(detected_edges, detected_edges, lowThreshold, lowThreshold*ratio, kernel_size);
//第一个参数是原图像,第二个参数是输出图像,支持本地计算,第三个参数是低阈值,第四个参数是高阈值,第五个参数是内部sobel算子使用的内核大小。
/// 使用 Canny算子输出边缘作为掩码显示原图像
dst = Scalar::all(0);
//把dst填充为黑色
src.copyTo(dst, detected_edges);
//第一个参数为输出图像,第二个参数为掩码;即把第二个图像中非0的部分在src中的像素复制给dst;
imshow(window_name, dst);
}
/** @函数 main */
int main(int argc, char** argv)
{
/// 装载图像
src = imread("E:\\code\\test\\image\\lena.png",1);
if (!src.data)
{
return -1;
}
/// 创建与src同类型和大小的矩阵(dst)
dst.create(src.size(), src.type());
/// 原图像转换为灰度图像
cvtColor(src, src_gray, CV_BGR2GRAY);
/// 创建显示窗口
namedWindow(window_name, CV_WINDOW_AUTOSIZE);
/// 创建trackbar
createTrackbar("Min Threshold:", window_name, &lowThreshold, max_lowThreshold, CannyThreshold);
/// 显示图像
CannyThreshold(0, 0);
/// 等待用户反应
waitKey(0);
return 0;
}
/// 使用 3x3内核降噪
blur(src_gray, detected_edges, Size(3, 3));
/// 运行Canny算子
Canny(detected_edges, detected_edges, lowThreshold, lowThreshold*ratio, kernel_size);
//第一个参数是原图像,第二个参数是输出图像,支持本地计算,第三个参数是低阈值,第四个参数是高阈值,第五个参数是内部sobel算子使用的内核大小。
/// 使用 Canny算子输出边缘作为掩码显示原图像