计算机视觉特征图可视化与注意力图可视化(持续更新)
1.YOLOv5 特征图可视化
可视化代码:
def feature_visualization(x, module_type, stage, n=2, save_dir=Path('runs/detect/exp')):
"""
x: Features to be visualized
module_type: Module type
stage: Module stage within model
n: Maximum number of feature maps to plot
save_dir: Directory to save results
"""
if 'Detect' not in module_type:
batch, channels, height, width = x.shape # batch, channels, height, width
if height > 1 and width > 1:
f = save_dir / f"stage{stage}_{module_type.split('.')[-1]}_features.png" # filename
blocks = torch.chunk(x[0].cpu(), channels, dim=0) # select batch index 0, block by channels
n = min(n, channels) # number of plots
fig, ax = plt.subplots(math.ceil(n / 2), 2, tight_layout=True) # 8 rows x n/8 cols
ax = ax.ravel()
plt.subplots_adjust(wspace=0.05, hspace=0.05)
for i in range(n):
ax[i].imshow(blocks[i].squeeze()) # cmap='gray'
ax[i].axis('off')
LOGGER.info(f'Saving {f}... ({n}/{channels})')
plt.savefig(f, dpi=300, bbox_inches='tight')
plt.close()
np.save(str(f.with_suffix('.npy')), x[0].cpu().numpy()) # npy save使用:
feature_visualization(features, name, stage_id, save_dir=ROOT / "visual")
结果示例:

2.优化的特征图可视化
可视化代码:
def feature_visualization(x, module_type, stage, n=2, save_dir=Path('runs/detect/exp')):
"""
x: Features to be visualized
module_type: Module type
stage: Module stage within model
n: Maximum number of feature maps to plot
save_dir: Directory to save results
"""
if 'Detect' not in module_type:
batch, channels, height, width = x.shape # batch, channels, height, width
if height > 1 and width > 1:
f = save_dir / f"stage{stage}_{module_type.split('.')[-1]}_features.png" # filename
blocks = torch.chunk(x[0].cpu(), channels, dim=0) # select batch index 0, block by channels
n = min(n, channels) # number of plots
fig, ax = plt.subplots(math.ceil(n / 2), 2, tight_layout=True) # 8 rows x n/8 cols
ax = ax.ravel()
plt.subplots_adjust(wspace=0.05, hspace=0.05)
for i in range(n):
block = blocks[i].squeeze().detach().numpy()
block = (block - np.min(block)) / (np.max(block) - np.min(block))
temp = np.array(block * 255.0, dtype=np.uint8)
temp = cv2.applyColorMap(temp, cv2.COLORMAP_JET)
ax[i].imshow(temp, cmap=plt.cm.jet) # cmap='gray'
ax[i].axis('off')
LOGGER.info(f'Saving {f}... ({n}/{channels})')
plt.savefig(f, dpi=300, bbox_inches='tight')
plt.close()
np.save(str(f.with_suffix('.npy')), x[0].cpu().numpy()) # npy save使用:
feature_visualization(features, name, stage_id, save_dir=ROOT / "visual")
结果示例:
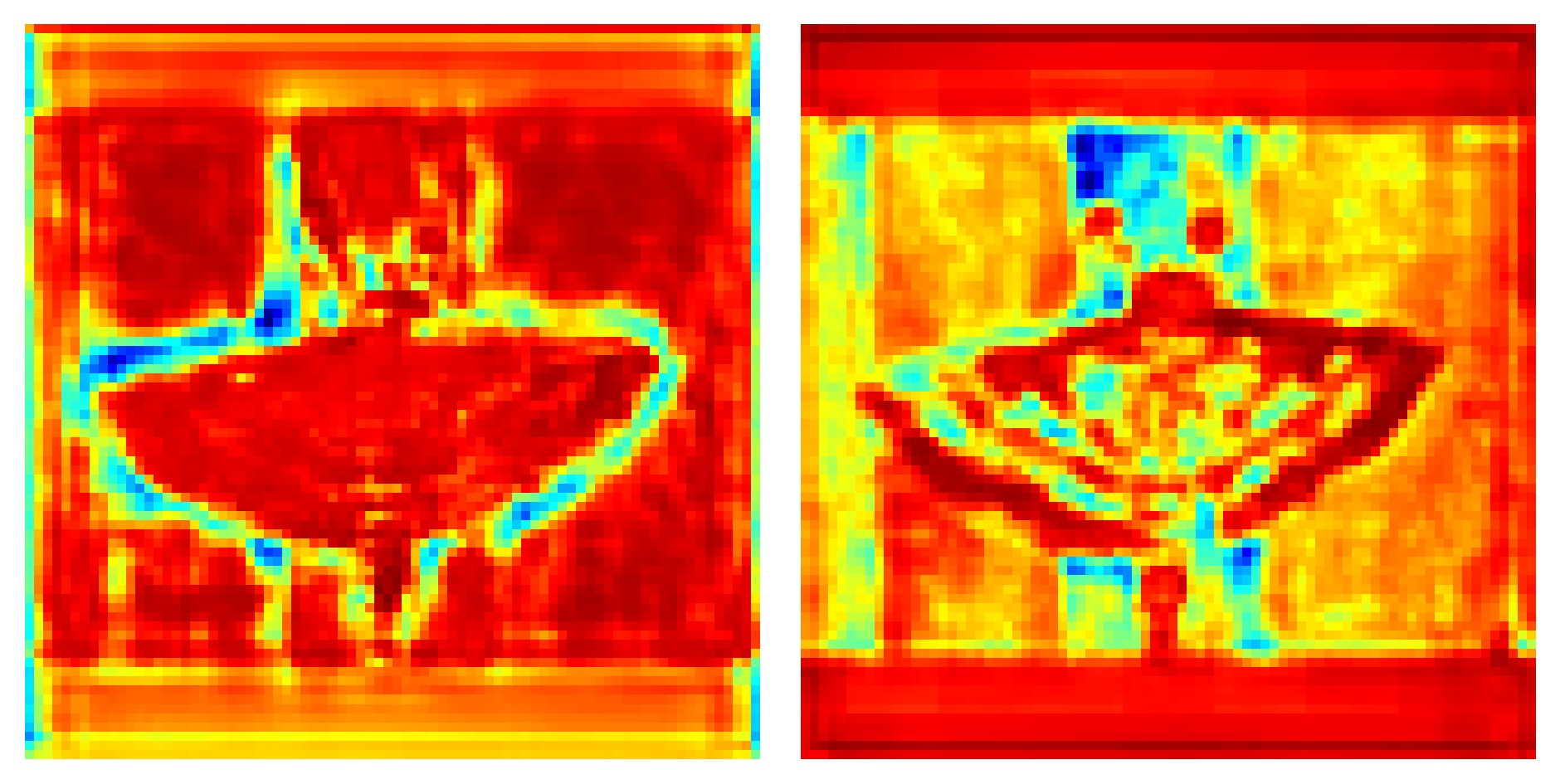
优化的可视化代码可视化结果更加清晰
参考:GitHub - z1069614715/objectdetection_script: 一些关于目标检测的脚本的改进思路代码,详细请看readme.md
3.注意力图可视化(YOLO)
可视化代码:
def show_CAM(save_img_path, image, feature_maps, class_id, all_ids=97, image_size=(640, 640), normalization=True):
"""
save_img_path: save heatmap images path
feature_maps: this is a list [tensor,tensor,tensor], tensor shape is [1, 3, N, N, all_ids]
normalization: Normalize score and class to 0 to 1
image_size: w, h
"""
SHOW_NAME = ["score", "class", "class*score"]
img_ori = image
layers0 = feature_maps[0].reshape([-1, all_ids])
layers1 = feature_maps[1].reshape([-1, all_ids])
layers2 = feature_maps[2].reshape([-1, all_ids])
layers = torch.cat([layers0, layers1, layers2], 0)
if normalization:
score_max_v = 1.
score_min_v = 0.
class_max_v = 1.
class_min_v = 0.
else:
score_max_v = layers[:, 4].max() # compute max of score from all anchor
score_min_v = layers[:, 4].min() # compute min of score from all anchor
class_max_v = layers[:, 5 + class_id].max() # compute max of class from all anchor
class_min_v = layers[:, 5 + class_id].min() # compute min of class from all anchor
for j in range(3): # layers
layer_one = feature_maps[j]
# compute max of score from three anchor of the layer
if normalization:
anchors_score_max = layer_one[0, :, :, :, 4].max(0)[0].sigmoid()
# compute max of class from three anchor of the layer
anchors_class_max = layer_one[0, :, :, :, 5 + class_id].max(0)[0].sigmoid()
else:
anchors_score_max = layer_one[0, :, :, :, 4].max(0)[0]
# compute max of class from three anchor of the layer
anchors_class_max = layer_one[0, :, :, :, 5 + class_id].max(0)[0]
scores = ((anchors_score_max - score_min_v) / (
score_max_v - score_min_v))
classes = ((anchors_class_max - class_min_v) / (
class_max_v - class_min_v))
layer_one_list = []
layer_one_list.append(scores)
layer_one_list.append(classes)
layer_one_list.append(scores * classes)
for idx, one in enumerate(layer_one_list):
layer_one = one.cpu().numpy()
if normalization:
ret = ((layer_one - layer_one.min()) / (layer_one.max() - layer_one.min())) * 255
else:
ret = ((layer_one - 0.) / (1. - 0.)) * 255
ret = ret.astype(np.uint8)
gray = ret[:, :, None]
ret = cv2.applyColorMap(gray, cv2.COLORMAP_JET)
ret = cv2.resize(ret, image_size)
img_ori = cv2.resize(img_ori, image_size)
show = ret * 0.50 + img_ori * 0.50
show = show.astype(np.uint8)
cv2.imwrite(os.path.join(save_img_path, f"{j}_{SHOW_NAME[idx]}.jpg"), show)使用:
show_CAM(ROOT/"visual",
cv2.imread(path),
ret[1],
0, # 指的是你想查看的类别 这个代码中我们看的是bear 所有在coco数据集中是21
80+ 5, # 80+5指的是coco数据集的80个类别+ x y w h score 5个数值
image_size=(640, 640), # 模型输入尺寸
# 如果为True将置信度和class归一化到0~1,方便按置信度进行区分热力图,
# 如果为False会按本身数据分布归一化,这样方便查看相对置信度。
normalization=True
)
结果示例:

参考:GitHub - z1069614715/objectdetection_script: 一些关于目标检测的脚本的改进思路代码,详细请看readme.md