“系统建模与辨识数据库”系统辨识-伊利湖问题建模
“系统建模与辨识数据库”系统辨识-伊利湖问题建模
- 一、 辨识问题的理解
-
- 1、辨识的验前知识
- 2、个人的理解与方法思考
- 二、 基于反向传播(BP)的神经网络建模方法
-
- 1、基于反向传播(BP)的神经网络建模的理论知识:
- 2、基于反向传播(BP)的神经网络算法
- 三、 辨识算法的实现(Matlab2018a)
- 四、 模型验证
-
- 法一:设置模型训练次数-100
- 法二:设置损失函数阈值(End_condition)
- 五、 结论
- 参考文献
一、 辨识问题的理解
1、辨识的验前知识
辨识问题为伊利湖西部盆地的识别,数据采样时间:1个月,样品数量:57个样品。五个输入,两个输出,输入为:水温、水传导性、水碱度、三氧化氮、总硬度。输出为:溶解氧、藻类。
2、个人的理解与方法思考
伊利湖西部盆地的辨识问题为多输入多输出问题,其模型未知,模型结构未知,模型参数也未知。我首先考虑到了运用神经网络对伊利湖西部盆地进行数学模型建模,利用已知的57组数据进行反复训练,直到损失函数满足要求,这是神经网络模型的参数变为辨识得到的结果。针对多输入多输出选用基于反向传播神经网络建模方法,激励函数为sigmoid函数。其次针对多输入多输出问题,我还想到了使用多输入多输出差分方程建模的方法,但是本人对于其理解还不够深入,特别的针对多输出多输出差分方程的阶次辨识,时滞辨识的数学推到存在较大疑问,因此假设了模型阶次与时滞进行改系统辨识。
二、 基于反向传播(BP)的神经网络建模方法
1、基于反向传播(BP)的神经网络建模的理论知识:
针对多输入多输出问题,采用了基于反向传播(BP)的神经网络建模方法。设计的神经网络模型为典型的三层神经网络,包含输入层,隐层,输出层,其模型结构如下图1。
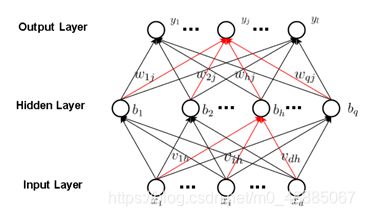
图中 x i x_i xi 为表示为第i个输入节点,数量为d个。同理, b h b_h bh 与 y j y_j yj 分别代表了隐层与输出层第h个与第j个节点,数量分别为q个与L个。
v i h v_ih vih 为输入层第i个节点与隐层第h个节点的权值, w h j w_hj whj 为隐层第h个节点与隐层第j个节点的权值。
假设系统神经模型为:

代价函数定义:
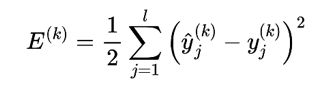
记下来只要根据代价函数不断去修正权值与参数即可,BP算法基于梯度下降策略,以目标的负梯度方向对参数进行调整,本模型有4个参数:ν_ih、 γ_h、 ω_hj 、 θ_j,因此我们需要计算如下的梯度参数:

为方便计算,引入两个过程变量:
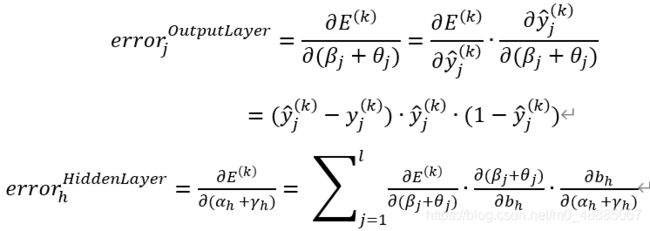
具体的计算过程详见附件,这里只给出最终简化的结果:
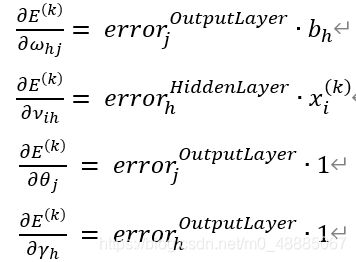
于是就可以得到如下的权值与连接权更新规则:其中η为给定学习率,也称为学习步长。
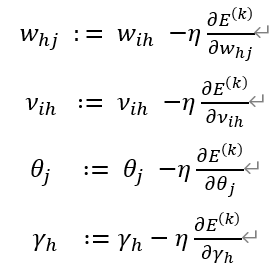
通过以上权值与连接权更新规则,对每一组输入输出数据进行训练,最终得到神经网络模型。
2、基于反向传播(BP)的神经网络算法
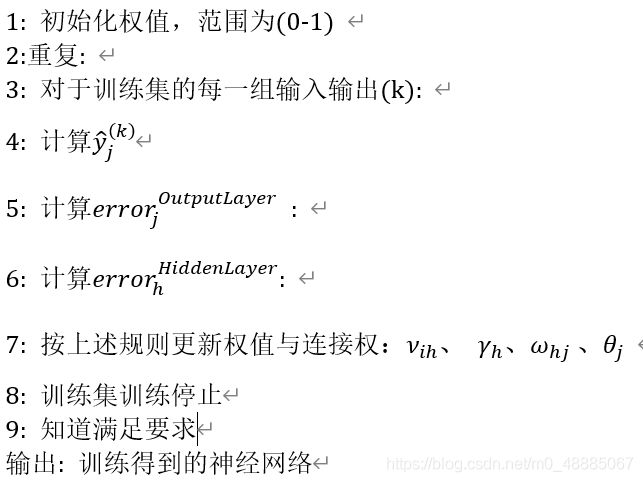
在上述理论基础上,总结神经网络建模的算法:
输入: 训练集
设置学习速率
步骤:
三、 辨识算法的实现(Matlab2018a)
详见链接
四、 模型验证
模型验证采用比较实际系统输出与模型输出之前的残差,通过增加训练次数,使训练得到的神经网络模型损失函数满足要求,即可得到辨识的模型。思路有两种:一种使设置神经网络模型参数辨识的损失函数阈值,一旦损失函数小于此阈值则表明神经网络网络模型达到要求,停止训练;另一种方法是设置训练次数,一旦训练次数达到要求,认定模型达到要求。
法一:设置模型训练次数-100
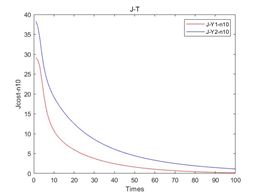
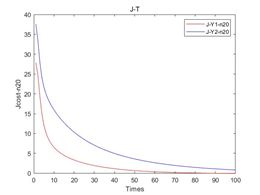
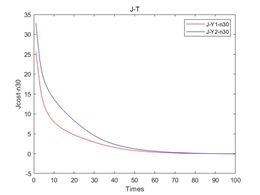
上图2中a、b、c、d分别代表了在噪声强度为0,10%、20%、30%下的损失函数。通过对所有模型进行100次训练,发现模型损失函数随着训练次数增加不断减小,最终是可以达到模型精度要求的。
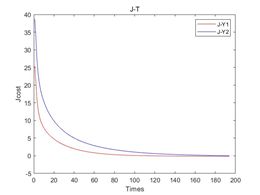
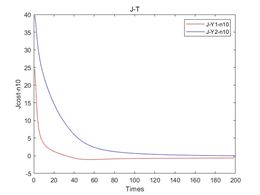
法二:设置损失函数阈值(End_condition)
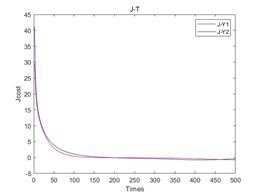
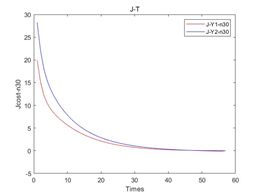
设置损失函数阈值为0.01,通过神经网络进行数据训练,最终训练次数如表所示,其损失函数如图3所示,其中图11中a、b、c、d分别代表了在噪声强度为0,10%、20%、30%下的损失函数。
| 噪声强度 | 训练次数 |
|---|---|
| 0 | 194 |
| 10% | 199 |
| 20% | 205 |
| 30% | 57 |

五、 结论
通过神经网络对伊利湖西部盆地数据进行建模,其有别于前面作业与实验的辨识方法,利用神经网络的线性、非线性特性,可建立线性、非线性系统的静态、动态、逆动态及预测模型,从而实现伊利湖西部盆地数据的建模。
本文采用的BP神经网络,其基本思想是最小二乘法,它采用梯度下降搜索方法,使网络的实际输出值与期望输出值的误差均方值为最小。通过本次建模发现BP神经网络具有以下优点:
1.不要求建立实际系统的辨识模型,即可省去系统结构建模这一步骤;
2.辨识的收敛速度不依赖于待辨识系统的维数,只与神经网络本身及其所采用的学习算法有关;
3.神经网络的连接权值在辨识中对应于模型参数,通过连接权值的调节可使网络输出逼近于系统输出;
但通过实验程序仿真也发现利用BP神经网络对伊利湖西部盆地数据进行建模的不足:
1.其辨识算法速度较慢,针对本文的5输入2输出。
2.如果目标函数存在多个极值点,容易陷入局部极小值点,这与学习速率的设置有关。
3.本次BP神经网络建模是在给定隐层数目与隐层节点数目下进行的,因此对于一般建模很难去确定神经网络层的结构,只能通过横向对比去选择最优神经网络结构。
参考文献
[1] 李玉峰,王栋栋,王博.基于BP神经网络的开关磁阻电机直接转矩控制建模与仿真[J].电子器件,2020,43(04):825-830.
[2] 刘金琨,沈晓蓉,赵龙.系统辨识理论及Matlab仿真[M].电子工业出版社,2020.9.
[3] 李言俊,张科.系统辨识理论及应用[M].国防工业出版社,2016.2.
[4] 相明辉,梁占伟,孙贻超,王新钢.基于BP神经网络的燃煤锅炉内H_2S质量浓度建模预测[J].动力工程学报,2020,40(06):433-439.
[5] 周志华.机器学习[M].清华大学出版社,2016.
[6] 李洪涛,许家俊,张明柱,王建华.基于BP神经网络的柴油发动机特性建模[J].农机化研究,2021,43(01):220-226.
“系统建模与辨识数据库”系统辨识-伊利湖问题建模-原始数据+程序+仿真截图:link.