Opencv的getRotationMatrix2D函数底层解析
源码
cv::Mat cv::getRotationMatrix2D( Point2f center, double angle, double scale )
{
angle *= CV_PI/180;
double alpha = cos(angle)*scale;
double beta = sin(angle)*scale;
Mat M(2, 3, CV_64F);
double* m = M.ptr();
m[0] = alpha;
m[1] = beta;
m[2] = (1-alpha)*center.x - beta*center.y;
m[3] = -beta;
m[4] = alpha;
m[5] = beta*center.x + (1-alpha)*center.y;
return M;
} 推导
1、有图有真相
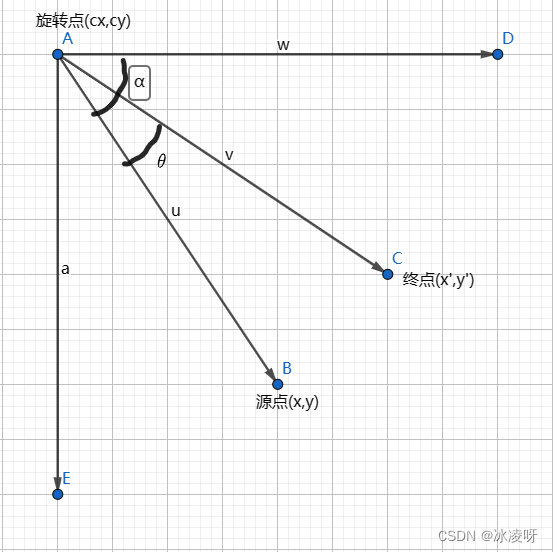
为什么这样画图,值得注意的是,计算机中图像的横坐标是向右增加,纵坐标是向下增加!!!
2、任务描述
其中角DAB=α,角CAB=θ
AD与横坐标轴平行,AE与纵坐标轴平行,现在需要沿着A点(centerX,centerY)==>>简写(cx,cy)作为旋转中心
将B点旋转θ角度后到达C点,假设C点坐标为(x',y'),求解x',y'和x,y,θ,cx,cy的数学关系
3、开始计算
AC由AB旋转得到,故其长度相等,令AC=AB=L
于是由三角函数知识
x'=cx+L*cos(α-θ)=cx+L*(cos(α)*cos(θ)+sin(α)*sin(θ)) 1式
y'=cy+L*sin(α-θ)=cy+L*(sin(a)*cos(θ)-sin(θ)*cos(a)) 2式
cos(α)=(x-cx)/L 3式
sin(a)=(y-cy)/L 4式
把3式,4式分别代入1式和2式,可以消去α和L。得到
x'=cx+(x-cx)*cos(θ)+(y-cy)*sin(θ)=x*cos(θ)+y*sin(θ)+cx*(1-cos(θ))-cy*sin(θ)
y'=cy+(y-cy)*cos(θ)-(x-cx)*sin(θ)=x*(-sin(θ))+y*cos(θ)+cy*(1-cos(θ))+cx*sin(θ)
提取出矩阵就是
[
[cos(θ),sin(θ),cx*(1-cos(θ))-cy*sin(θ)],
[-sin(θ),cos(θ),cy*(1-cos(θ))+cx*sin(θ)]
]
验证
实践是检验真理的唯一标准
上Python代码
import numpy as np
import cv2 as cv
import math
cx = 250
cy = 250
angle = 45
scale = 1.0
opencv_M = cv.getRotationMatrix2D((cx, cy), angle, scale)
print(f"opencv_M=\n{opencv_M}")
print("=================================")
cos_angle = math.cos(angle / 180.0 * math.pi)
sin_angle = math.sin(angle / 180.0 * math.pi)
self_M = np.array([
[cos_angle, sin_angle, cx * (1 - cos_angle) - cy * sin_angle],
[-sin_angle, cos_angle, cy * (1 - cos_angle) + cx * sin_angle]
])
print(f"self_M=\n{self_M}")
旋转中心(cx,cy)=(250,250)
旋转角度θ=45°
不进行缩放操作scale=1.0
运行结果
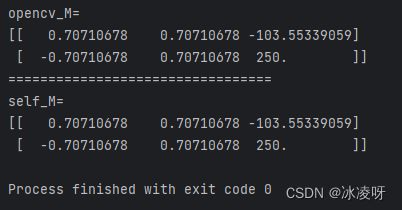
可以看出,运算结果是一模一样的,此函数的运算过程确实如上述公式所示
注意
python中math函数库的三角函数输入参数,是转换成多少pi,而不是直接输入一个角度,(准确地说,它接受的是弧度)