OpenCV库编译移植
OpenCV 是图像处理中最常用的库,华山派同样对其进行了支持。
1. 编译构建最新版本的 OpenCV(可选)
华山派目前库中自带了 OpenCV 3,如果想使用其他版本的则需自行构建。平头哥针对华山派上的玄铁芯片,对 OpenCV 第三方库进行了一些编译优化,我们去平头哥芯片开放社区下载工具包:
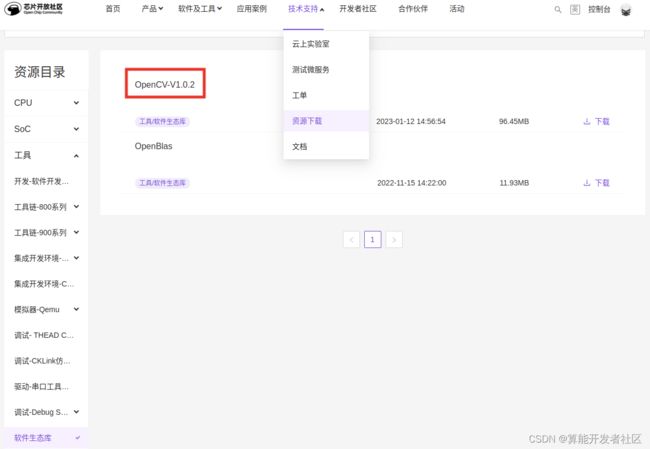
下载完后我们解压得到 OpenCV 源码和 quick start 教程:

在编译时需要选择 C906FDV 芯片的编译指令,默认编译静态链接库,如若要使用动态链接库,需要将编译依赖补全:
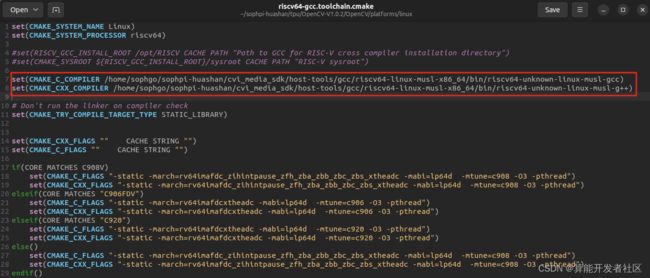
cmake .. -DCMAKE_TOOLCHAIN_FILE="../platforms/linux/riscv64-gcc.toolchain.cmake" -DWITH_OPENCL=OFF -DBUILD_opencv_calib3d=ON -DBUILD_ZLIB=ON -DBUILD_PNG=ON -DBUILD_SHARED_LIBS=OFF -DCMAKE_BUILD_WITH_INSTALL_RPATH=1 -DCMAKE_INSTALL_PREFIX=../install -DBUILD_CSI_CV=ON -DWITH_OPENMP=OFF -DWITH_PTHREADS_PF=OFF -DCORE=C906FDV -D BUILD_SHARED_LIBS=ON -D BUILD_opencv_features2d=ON -D BUILD_opencv_apps=OFF -D BUILD_TESTS=OFF -D BUILD_opencv_highgui=OFF -D BUILD_PERF_TESTS=OFF然后需要在 ../platforms/linux/riscv64-gcc.toolchain.cmake 中指定编译工具链的全局路径:
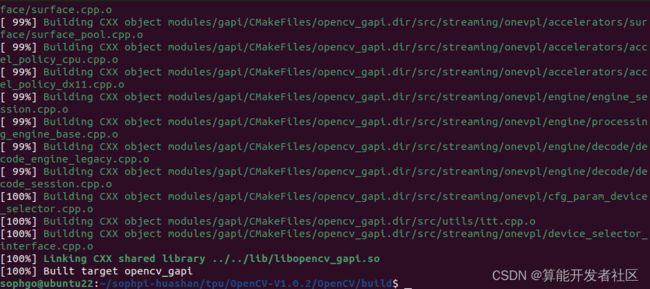
之后就可以按照 quick start 文档中的构建命令进行编译:
build
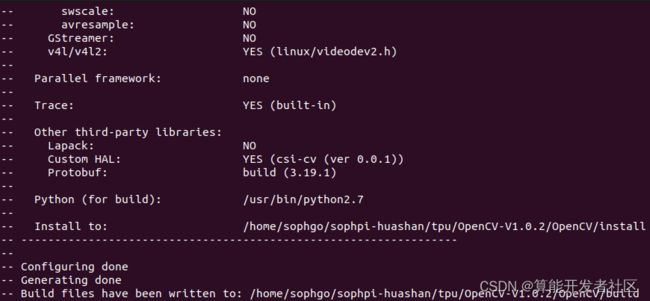
make -j32
make install(可选),默认安装在 ../install 下

2. 交叉编译 OpenCV 程序
我们以 OpenCV 的 resize 函数进行测试,测试代码如下:
#include
#include
#include
#include
void test() {
std::string img_path = "./hmbb1280.jpg";
cv::Mat img = cv::imread(img_path);
for (int i = 0; i < 100; i++)
cv::resize(img, img, cv::Size(640, 360), 0, 0, cv::INTER_AREA);
}
int main(int argc, char **argv) {
clock_t start, end;
start = clock();
test();
end = clock();
std::cout << std::endl << (double) (end - start) / CLOCKS_PER_SEC << std::endl;
return 0;
} CMakeLists.txt 编写参考如下,在使用时注意将工具链和库地址进行修改:
cmake_minimum_required(VERSION 3.16.5)
project(opencv_test_rvv07)
set(CMAKE_CXX_STANDARD 11)
set(CROSS_COMPILE 1) # enable the cross compiler config
IF(CROSS_COMPILE)
set(CMAKE_SYSTEM_NAME Linux)
set(TOOLCHAIN_DIR /home/sophgo/sophpi-huashan/host-tools/gcc/riscv64-linux-musl-x86_64/bin)
# specify the cross compiler
set(CMAKE_C_COMPILER ${TOOLCHAIN_DIR}/riscv64-unknown-linux-musl-gcc)
set(CMAKE_CXX_COMPILER ${TOOLCHAIN_DIR}/riscv64-unknown-linux-musl-g++)
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -march=rv64imafdcvxthead -mcmodel=medany -mabi=lp64d")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -march=rv64imafdcvxthead -mcmodel=medany -mabi=lp64d")
set(OPENCV_FLAG 3)
IF(OPENCV_FLAG EQUAL 0)
set(OPENCV_PATH /home/sophgo/sophpi-huashan/tpu/cvitek_tpu_sdk/opencv)
ELSEIF(OPENCV_FLAG EQUAL 1)
set(OPENCV_PATH /home/sophgo/sophpi-huashan/tpu/OpenCV-V1.0.2/OpenCV/install)
ELSEIF(OPENCV_FLAG EQUAL 2)
set(OPENCV_PATH /home/sophgo/sophpi-huashan/tpu/opencv-4.7.0/install)
ELSE()
set(OPENCV_PATH /home/sophgo/sophpi-huashan/tpu/opencv-install-rv07/install)
ENDIF()
include_directories(${OPENCV_PATH}/include)
link_directories(${OPENCV_PATH}/lib)
set(OPENCV_LIBS ${OPENCV_LIBS} opencv_core opencv_imgcodecs opencv_imgproc)
add_executable(${PROJECT_NAME} main.cpp)
target_link_libraries(${PROJECT_NAME} ${OPENCV_LIBS})
ELSE()
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(${PROJECT_NAME} main.cpp)
target_link_libraries(${PROJECT_NAME} ${OpenCV_LIBRARIES})
ENDIF()然后进行编译,指令如下:
cmake . # 在项目目录下
make # 得到二进制可执行文件编译成功后,将可执行程序、测试图片和链接库通过 scp 等方式传送到华山派上,并在派上声明环境:
export LD_LIBRARY_PATH=/mnt/data/lib:$LD_LIBRARY_PATH运行得到测试结果如下:
可以看出,平头哥优化版本的 OpenCV 的确是最快的,其次是 OpenCV-4.7。
3. 移植案例—OpenCV 光流算法
光流是指在连续的两帧图像中由于图像中的物体移动或者摄像头的移动导致的图像中目标像素的移动。OpenCV 库中集成了多种常用的稠密光流算法。本节我们简要介绍两种稠密光流算法在无人机飞行测速中的应用,以及将其移植到华山派上的性能表现。
3.1 OpenCV 光流算法移植
DISOpticalFlow
算法的 创建/计算:
cv::Ptr DISOpticalFlowAlgorithm = cv::DISOpticalFlow::create(cv::DISOpticalFlow::PRESET_MEDIUM); // 可选参数 PRESET_MEDIUM PRESET_FAST PRESET_ULTRAFAST
DISOpticalFlowAlgorithm->calc(prvs, next, flow); 调参:
// 包含了 get set,这边只列出 set 方法
setFinestScale(); // 图像高斯金字塔层数 2
setGradientDescentIterations(); // 最大梯度下降迭代次数 12
setPatchSize(); // Patch 大小 8
setPatchStride(); // Patch 步长 4
setUseMeanNormalization(); // 平均正则化 true
setUseSpatialPropagation(); // true
setVariationalRefinementAlpha(); // 平滑度权重 20.0
setVariationalRefinementDelta(); // 颜色权重 5.0
setVariationalRefinementGamma(); // 梯度权重 10.0
setVariationalRefinementIterations(); // patch 反向搜索中最大梯度迭代次数 0代码示例:
void cal_DISOpticalFlow(char *prvs_img, char *next_img, double &dx, double &dy) {
cv::Mat frame1 = cv::imread(prvs_img), frame2 = cv::imread(next_img);
int px = frame1.size[0], py = frame1.size[1]; // 行/列
cv::Rect rectL((px-r) / 2, (py-r) / 2, r/2,r/2); // 取中间的128x128区域
// RGB 转灰度图
cv::Mat prvs, next;
prvs = frame1(rectL).clone();
next = frame2(rectL).clone();
cvtColor(prvs, prvs, cv::COLOR_BGR2GRAY);
cvtColor(next, next, cv::COLOR_BGR2GRAY);
cv::Mat flow(prvs.size(), CV_32FC2);
// 创建光流算法调参后计算
cv::Ptr DISOpticalFlowAlgorithm = cv::DISOpticalFlow::create(cv::DISOpticalFlow::PRESET_MEDIUM);
DISOpticalFlowAlgorithm->setFinestScale(2);
DISOpticalFlowAlgorithm->setGradientDescentIterations(12);
DISOpticalFlowAlgorithm->setPatchSize(4);
DISOpticalFlowAlgorithm->setPatchStride(2);
DISOpticalFlowAlgorithm->setUseMeanNormalization(true);
DISOpticalFlowAlgorithm->setUseSpatialPropagation(true);
DISOpticalFlowAlgorithm->setVariationalRefinementAlpha(20.0);
DISOpticalFlowAlgorithm->setVariationalRefinementDelta(5.0);
DISOpticalFlowAlgorithm->setVariationalRefinementGamma(10.0);
DISOpticalFlowAlgorithm->setVariationalRefinementIterations(0);
DISOpticalFlowAlgorithm->calc(prvs, next, flow);
// 每个通道的均值即为光流计算的偏移量
dx = cv::mean(flow)[0];
dy = cv::mean(flow)[1];
} DIS 光流算法分析:
速度较快,但是面对低纹理场景时效果较差
OpenCV 官方文档 https://docs.opencv.org/master/de/d4f/classcv_1_1DISOpticalFlow.html
FarnebackFlow
FarnbackFlow 光流算法运行速度会略慢于 DIS 光流,但能较好地应对低纹理场景,示例如下:
cv::calcOpticalFlowFarneback(prvs, next, flow, 0.5, 3, 15, 3, 5, 1.2, 0);OpenCV 官方文档 https://docs.opencv.org/4.7.0/dc/d6b/group__video__track.html
应用到无人机测速,我们往往只需要关注图像中央的 128x128 大小的区域(甚至64x64)即可。这么做一方面可以大大减少计算量,另一方面图像中心区域测定的数据往往比较准确,因为其他区域的像素更容易受到相机畸变的影响。
以上两种算法得到的光流默认是双通道的 cv::Mat,两个通道分别存储每个像素在 x 轴和 y 轴方向的偏移量,求和取平均即可得到两帧图像整体的运动偏移量。
3.2 测试记录
速度测试
以下分别是 DIS算法(PRESET_MEDIUM 参数)、FB 以及两者混合取平均算法的执行结果,分别打印 dx,dy(偏移量单位:像素)和执行时间(单位:秒)。

正确性验证
两种算法可以互相验证正确性,也可以打印整个光流 flow Mat,检查是否有异常像素点。

4.参考资料
算丰学院:https://www.sophgo.com/curriculum/index.html