一文读懂openguass dcf网络模块
一文读懂openguass dcf网络模块
文章目录
- 一文读懂openguass dcf网络模块
-
- 0. mec概要
- 1. compress
- 2. mec
-
- 2.1 agent
-
- 2.1.1 初始化agent
- 2.1.2 agent执行
- 2.2 channel
-
- 2.2.1 初始化channel
- 2.2.2 连接channel
- 2.3 api
- 2.4 func
- 2.5 queue
-
- 2.5.1 初始化
- 2.5.2 运行
-
- 2.5.1.1 接收消息入队
- 2.5.1.2 发送消息入队
- 2.5.3 队列批处理
- 2.6 reactor
-
- 2.6.1 添加pipe
- 2.6.2 执行pipe
- 3. protocol
-
- 3.1 listener
-
- 3.1.1 系统调用accept
- 3.1.2 应用层accept
- 3.2 packet
- 3.3 ssl
- 3.4 pipe
-
- 3.4.1 pipe的连接
-
- 3.4.1.1 客户端
- 3.4.1.2 服务端
- 3.4.2 pipe的执行
-
- 3.4.2.1 发送
- 3.4.2.2 接收
- 3.5 tcp
- 4. 数据收发
-
- 4.1 消息
- 4.2 数据发送
- 4.3 数据接收
- 5. FAQ
-
- 5.1 代码层面如何区分channel中高低优先级?
-
- 5.4.1 消息的优先级
- 5.1.1 接收
- 5.1.2 发送
- 5.2 五大组件的关系图?
- 5.3 收发pipe是否都需要激活
- 5.4 网络超时时间如何设置
-
- 5.4.1 客户端(主动发起连接)
- 5.4.2 服务端(接受连接的一方)
- 5.4.3 消息收发超时
- 5.5 批处理的消息逻辑,怎么确定一次处理多少条消息
- 5.6 发送失败后的诊断
- 5.7 网络消息干扰,如何识别非本节点消息
- 5.8 agent执行job结束的标志,接收多少数据结束
- reference
0. mec概要
通信模块主要是基于MEC实现(Message Exchange Component),提供整个DCF组件实例间通信能力,以及异步事件处理框架。主要功能有:可扩展的多种通信协议,单播、广播、环回的发送接口,消息异步处理的框架,支持多channel机制和多优先级队列,支持压缩和批量发送等mec主要通过channel来进行通信,节点之间可能存在多个channel通道。
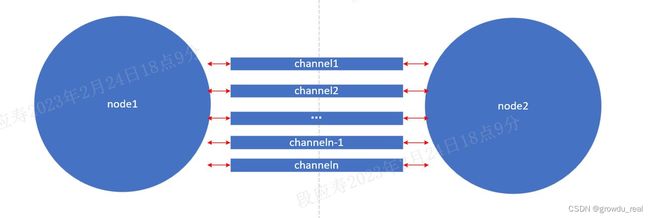
channel通过队列进行消息的收发,消息收发支持批量收发。channel内部采用pipe通信,pipe又分为高优先级和低优先级。每一个pipe内部有两条tcp链路,一条链路专门用于发送,一条链路专门用于接收。
消息收发流程如下图所示(此处队列只画出了一个,实际有多个队列,默认16个):

mec消息处理采用多线程加队列来实现,队列的访问采用锁加信号量来避免多线程冲突,mq和agent均采用这种模式来实现。
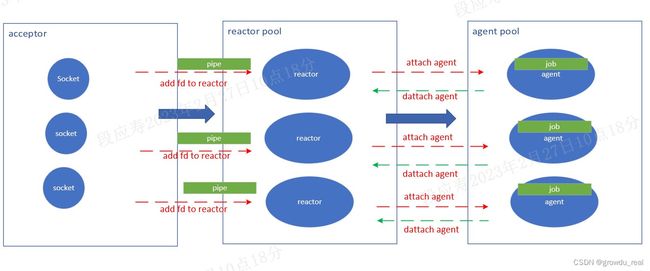
mec网络通信采用epoll I/O多路复用来实现,并使用reactor模型来实现服务端监听机制。其架构与下图(图片来自https://blog.csdn.net/u013256816/article/details/115388239)类似,采用主从reactor多线程模型只不过在mec中将mainreactor称作listener(acceptor)。

mec使用tcp监听链路来接收消息,消息接收采用reactor模型实现,最终交给agent来执行。实际流程与上图的reactor主从模型类似,消息接收执行流程如下:
mec的消息处理主要依靠如下四个组件来完成,而channel主要是用来传输,因而在下图中未体现。
mec重点由五大组件组成,分别是:
-
listener(acceptor)
listener负责监听和接受客户端的连接,充当epoll多路复用reactor模型中的acceptor角色。
-
reactor
负责监听acceptor建立好连接后添加过来的socket,当有事件到来时会将对应的socket绑定到agent运行。
-
agent
agent是一个线程池,负责执行channel中pipe的job。
-
queue
队列用于存放接收和发送的消息。
-
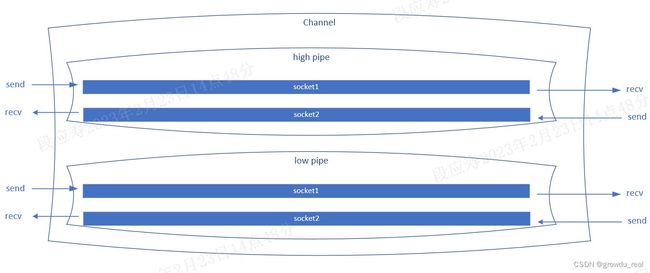
channel
channel是实际的通信通道,其内部由pipe来进行通信,pipe分为高优先级pipe和低优先级pipe。pipe在socket层面又分为发送pipe和接收pipe。节点之间就是通过channel来进行收发包,发送时通过发送pipe发送,接收时通过接收pipe来接收。
mec运行初始化流程如下:
mec模块的网络通信采用epoll I/O多路复用的reactor模型,同时结合线程池和代理池来实现。reactor负责消息的通知,分为高优先级reactor和低优先级reactor。内部通信采用channel的概念,channel内部采用pipe来进行连接通信。每一个代理运行在一个线程上,每一个pipe会附着到一个代理上运行。acceptor接受新的连接后,会创建channel,并将channel添加到reactor池中,reactor负责监听I/O事件的到来。
每一个acceptor接受到新的客户端连接请求后,接受连接并初始化pipe,同时将pipe添加到reactor中。reactor会监听每个pipe是否有事件到来,有事件到来时,reactor会把pipe附着到一个agent上运行。
每一个节点都有一个全局的静态mec_instance_t,用于保存mec相关的信息。
static mec_instance_t *g_mec = NULL;
/// @brief 消息交换实例
typedef struct st_mec_instance {
mec_profile_t profile; ///< mec主要信息
mq_context_t send_mq; ///< 发送队列
mq_context_t recv_mq; ///< 接收队列
mec_context_t mec_ctx; ///< mec上下文
fragment_ctx_t fragment_ctx; ///< 分片上下文
thread_t daemon_thread;///< 守护线程id
reactor_pool_t reactor_pool[PRIV_CEIL]; ///< epoll反应堆数组
agent_pool_t agent_pool[PRIV_CEIL]; ///< 代理池
ssl_ctx_t *ssl_acceptor_fd; ///< ssl接受器
ssl_ctx_t *ssl_connector_fd;///< ssl连接器
} mec_instance_t;
1. compress
压缩模块主要是对传输数据进行压缩,以及对接收到的数据进行解压缩,以提高网络传输数量。当前支持zstd压缩和lz4压缩。
2. mec
mec是Message Exchange Component消息交换组件的简称。主要通过mec.h对外提供使用接口。
2.1 agent
agent实际上是线程池模式,利用互斥锁和信号量加队列来实现。一旦有新的pipe到来的时候,就会唤醒一个线程去执行。如果没有空闲的agent,就会新创建一个agent。也就是说,agent是动态创建的,只有agent处理不过来时,才会创建新的agent。
所有新加入的pipe会先加入到队列里,每个线程去队列里取出一个pipe来处理。
agent与reactor对应,也分为高优先级agent和低优先级agent,并与reactor相对应。
2.1.1 初始化agent
初始化agent主要是初始化互斥锁和信号量。
evnt->status = CM_FALSE;
if (pthread_condattr_init(&evnt->attr) != 0) {
(void)pthread_cond_destroy(&evnt->cond);
return CM_ERROR;
}
if (pthread_mutex_init(&evnt->lock, 0) != 0) { /// 初始化锁
(void)pthread_cond_destroy(&evnt->cond);
return CM_ERROR;
}
if (pthread_condattr_setclock(&evnt->attr, CLOCK_MONOTONIC) != 0) {
(void)pthread_cond_destroy(&evnt->cond);
return CM_ERROR;
}
if (pthread_cond_init(&evnt->cond, &evnt->attr) != 0) { /// 初始化信号量
(void)pthread_cond_destroy(&evnt->cond);
return CM_ERROR;
}
2.1.2 agent执行
当reactor监听到有pipe就绪时,会将该pipe附着到agent上执行。
- 已有空闲agent
此时先看idle_agents是否有空闲的agent,有的话直接出队一个agent,并把pipe绑定到这个agent上执行,设置pipe是发送还是接收,激活pipe。
- 没有空闲agent
如果之前还没有创建过agent或者没有空闲的agent,就需要新建一个agent。
创建一个agent也是创建一个线程,这个线程会不停的空转或者执行pipe。创建时会用cm_event_init初始化锁和信号量,然后会在线程中用cm_event_timedwait等待信号量唤醒agent线程。
在创建pipe的时候会初始化send_mode和recv_mode的job,当线程被唤醒就会执行对应的job。
当调用attach_agent时,就意味着有一个pipe要放到agent里来运行。若在attach_agent成功后,同时调用cm_event_notify,则会发送信号给agent线程,表示有任务可以执行,此时会唤醒线程并执行pipe的job。
在网络模块中有两个地方会将pipe attach到agent,分别是客户端在connect成功后和reactor接收到事件之后。
-
客户端connect成功
if (attach_agent(pipe, get_mec_agent(pipe->priv), SEND_MODE, &agent) != CM_SUCCESS) { LOG_RUN_ERR("[MEC]attached agent failed inst [%u], channel id [%u], priv [%d]", MEC_INSTANCE_ID(pipe->channel->id), MEC_CHANNEL_ID(pipe->channel->id), pipe->priv); cm_thread_unlock(&pipe->send_lock); return CM_ERROR; }此时是将SEND_MODE模式的pipe attach到agent上执行,attach到agent成功后调用cm_event_notify通知agent有任务可以处理。此时流程进入agent_entry的循环里并执行加入的pipe,
pipe->attach[agent->mode].job((void *)pipe, &is_continue);agent收到信号后就会执行job,这里加入的pipe的mode是SEND_MODE,pipe的job在创建channel时赋值,SEND_MODE对应的job是mec_proc_send_pipe。
此时对应的是客户端行为,在连接时客户端是主动发送消息的一方。
-
reactor接收到事件
status_t status = attach_agent(pipe, reactor->agent_pool, RECV_MODE, &agent);当acceptor在建立好tcp连接并初始化好pipe后就会将pipe交给reactor进行处理,reactor会适用epoll_wait监听pipe的socket是否有事件到来。当有socket准备就绪时,就将其对应的pipe attach到agent上去执行,此时的mode为RECV_MODE。
agent收到信号后就会执行job,这里加入的pipe的mode是RECV_MODE,pipe的job在创建channel时赋值,RECV_MODE对应的job是mec_proc_recv_pipe。
2.2 channel
节点之间通过channel来通信,两个节点之间可以存在多个channel,channel个数可以通过配置参数配置。
channel是对pipe的封装,每个channel有它自己的id标识。
一个channel有两个pipe,一个高优先级,一个低优先级。
/// @brief channel
typedef struct st_mec_channel {
uint32 id; ///< id
atomic32_t serial_no;
mec_pipe_t pipe[PRIV_CEIL]; ///< pipe数组,高优先级和低优先级
} mec_channel_t;
创建channel时会根据实际的实例个数(节点个数)创建。
channel存放在mec上下文里,用一个二维数组来存放。其中一维是nodeid,二维是channel索引。比如三个节点的集群,若每个节点之间有三个channel,则有9个channel(实际使用的没有那么多,自己不会连自己的channel),因为在分布式集群中,各节点互相之间都需要通信。
typedef struct st_mec_context {
mec_lsnr_t lsnr;
mec_channel_t **channels; ///< channel二维数组,一维是node_id,二维是channel索引
bool8 is_connect[CM_MAX_NODE_COUNT][MEC_MAX_CHANNEL_NUM]; ///< 表示二维数组channels的每个channel是否连接过
mec_cb_t cb_processer[MEC_CMD_CEIL];
shutdown_phase_t phase;
} mec_context_t;
2.2.1 初始化channel
每个channel有两个pipe,每个pipe又有两个job,一个发送job,一个接收job,在初始化channel时注册,这个job就是具体的执行函数。最后会通过reactor分配到agent线程上去具体执行。
void mec_init_channels_param(mec_channel_t *channel, const mec_profile_t *profile)
{
for (uint32 k = 0; k < PRIV_CEIL; k++) {
mec_pipe_t *pipe = &channel->pipe[k];
cm_init_thread_lock(&pipe->send_lock);
cm_init_thread_lock(&pipe->recv_lock);
cm_init_thread_lock(&pipe->recv_epoll_lock);
pipe->priv = k;
pipe->channel = channel;
pipe->attach[SEND_MODE].job = mec_proc_send_pipe;
pipe->attach[RECV_MODE].job = mec_proc_recv_pipe;
pipe->send_pipe.connect_timeout = profile->connect_timeout;
pipe->send_pipe.socket_timeout = profile->socket_timeout;
pipe->recv_pipe.connect_timeout = profile->connect_timeout;
pipe->recv_pipe.socket_timeout = profile->socket_timeout;
pipe->send_pipe.l_onoff = 1;
pipe->send_pipe.l_linger = 1;
pipe->try_connet_count = 0;
pipe->send_need_close = CM_FALSE;
pipe->recv_need_close = CM_FALSE;
}
}
- mec_proc_send_pipe
- mec_proc_recv_pipe
服务端启动监听的流程如下:
初始化channel完成后,还需要初始化mq接收上下文和mq发送上下文中的channel_private_queue,这是一个二维数组,是消息队列的具体存放地址。一维是节点id,二维是channel对应的消息队列。假设有三个节点,每个节点配置的channel个数是4,那么就有3*4=12个消息队列,对应3*4的二维数组。
2.2.2 连接channel
在创建完listener(acceptor)后主线程会进行channel的connect操作。
此时会将所有的channel连接,具体来说是pipe连接,channel的连接其实就是channel两个pipe(高低优先级)的连接。通过这个步骤,就将pipe放入到agent里,此时socket也还没有到reactor里,且此时的pipe是发送类型,表明需要主动发送消息,最终消息流程转移到了mec_proc_send_pipe。
2.3 api
api模块提供了mec对外的全部接口,其对应的头文件为mec.h,其他模块需要使用mec模块的功能和接口只需要引入mec.h头文件即可。
api模块定义了mec消息结构和消息类型,mec消息分为消息头和消息体,消息头主要是存放节点相关信息和控制信息,消息体存放应用层数据。
消息头结构如下:
/// @brief 消息交换头部
typedef struct st_mec_message_head {
uint8 cmd; ///< 消息请求类型
uint8 flags; ///< 状态标志
uint16 batch_size; ///< 批量消息条数
uint32 src_inst; ///< 来源id(源节点id)
uint32 dst_inst; ///< 目的节点id
uint32 stream_id; ///< 流id(channel id)
uint32 size; ///< 消息长度
uint32 serial_no; ///< channel序列号
uint32 frag_no; ///< 分片序列号
uint32 version; ///< 协议版本
uint64 time1;
uint64 time2;
uint64 time3;
} mec_message_head_t;
消息体结构如下:
/// @brief 消息体
typedef struct st_mec_message {
mec_message_head_t *head; ///< 消息头指针
char *buffer; ///< 消息
uint32 buf_size; ///< 消息大小
uint32 aclt_size;
uint32 offset; // for reading
uint32 options; // options
} mec_message_t;
消息头中cmd的类型有如下几种:
/// @brief 交换消息命令
typedef enum en_mec_command {
// normal cmd:
MEC_CMD_CONNECT = 0, ///< 连接请求
MEC_CMD_HEALTH_CHECK_HIGH = 1,
MEC_CMD_HEALTH_CHECK_LOW = 2,
MEC_CMD_APPEND_LOG_RPC_REQ = 3, ///< 日志添加请求
MEC_CMD_APPEND_LOG_RPC_ACK = 4, ///< 日志添加确认
MEC_CMD_VOTE_REQUEST_RPC_REQ = 5, ///< 投票请求
MEC_CMD_VOTE_REQUEST_RPC_ACK = 6, ///< 投票确认
MEC_CMD_GET_COMMIT_INDEX_REQ = 7, ///< 索引提交请求
MEC_CMD_GET_COMMIT_INDEX_ACK = 8, ///< 索引提交确认
MEC_CMD_PROMOTE_LEADER_RPC_REQ = 9, ///< 升主请求
MEC_CMD_BLOCK_NODE_RPC_REQ = 10,
MEC_CMD_BLOCK_NODE_RPC_ACK = 11,
MEC_CMD_SEND_COMMON_MSG = 12, ///< 发送通用消息
MEC_CMD_CHANGE_MEMBER_RPC_REQ = 13, ///< 成员变更请求
MEC_CMD_UNIVERSAL_WRITE_REQ = 14, ///< 通用写入请求
MEC_CMD_UNIVERSAL_WRITE_ACK = 15, ///< 通用写入确认
MEC_CMD_STATUS_CHECK_RPC_REQ = 16, ///< 状态检查请求
MEC_CMD_STATUS_CHECK_RPC_ACK = 17, ///< 状态检查确认
MEC_CMD_NORMAL_CEIL, ///< 在这个枚举前添加新的请求,在后面添加测试请求,比这个枚举值大仅用于测试
// test cmd:
MEC_CMD_TEST_REQ = MEC_CMD_NORMAL_CEIL + 1, ///< 测试请求
MEC_CMD_TEST_ACK = MEC_CMD_NORMAL_CEIL + 2, ///< 测试确认
MEC_CMD_TEST1_REQ = MEC_CMD_NORMAL_CEIL + 3,
MEC_CMD_TEST1_ACK = MEC_CMD_NORMAL_CEIL + 4,
MEC_CMD_BRD_TEST = MEC_CMD_NORMAL_CEIL + 5,
MEC_CMD_CEIL,
} mec_command_t;
mec对外提供的接口主要分为以下几类:
-
初始化mec和释放mec资源
/// @brief 初始化mec /// @return status_t mec_init(); /// @brief 释放mec相关资源 void mec_deinit();这两个接口主要是主线程创建的时候调用和主线程退出前调用。
-
消息处理函数注册和注销接口
/// @brief 注册消息处理函数,将消息注册到mec上下文的回调里,当收到相关请求类型的数据时,会调用proc函数进行处理 /// @param cmd 处理函数对应的消息类型 /// @param proc 消息类型对应的处理函数 /// @param priv 消息的优先级(高优先级或者低优先级) void register_msg_process(mec_command_t cmd, msg_proc_t proc, msg_priv_t priv) { mec_context_t *mec_ctx = get_mec_ctx(); if (cmd >= MEC_CMD_CEIL) { return; } mec_ctx->cb_processer[cmd].priv = priv; mec_ctx->cb_processer[cmd].proc = proc; }消息处理函数也可以注销,注销后可重新进行注册。
/// @brief 注销cmd类型的消息处理函数 /// @param cmd 消息类型 void unregister_msg_process(mec_command_t cmd) { mec_context_t *mec_ctx = get_mec_ctx(); mec_ctx->cb_processer[cmd].proc = NULL; mec_ctx->cb_processer[cmd].priv = PRIV_CEIL; } -
消息发送和接收消息接口
消息发送一般是多个接口结合使用,一般流程为:
-
先申请一个pack,对应的接口为;
/// @brief 分配一个消息,在广播场景中,dst_inst 必须是 CM_INVALID_NODE_ID /// @param pack 消息指针 /// @param cmd 消息类型 /// @param src_inst 消息发出方 /// @param dst_inst 消息接收方 /// @param stream_id 流id /// @return status_t mec_alloc_pack(mec_message_t *pack, mec_command_t cmd, uint32 src_inst, uint32 dst_inst, uint32 stream_id); -
往pack里put数据,对应的接口根据数据类型的不同分为如下几个,支持的数据类型有int64、int32、int16、double、bin;
/// @brief 往消息里添加int64类型的数据 /// @param pack 消息 /// @param value 数据值 /// @return status_t mec_put_int64(mec_message_t *pack, uint64 value); /// @brief 往消息里添加int32类型的数据 /// @param pack 消息 /// @param value 数据值 /// @return status_t mec_put_int32(mec_message_t *pack, uint32 value); /// @brief 往消息里添加int16类型的数据 /// @param pack 消息 /// @param value 数据值 /// @return status_t mec_put_int16(mec_message_t *pack, uint16 value); /// @brief 往消息里添加double类型的数据 /// @param pack 消息 /// @param value 数据值 /// @return status_t mec_put_double(mec_message_t *pack, double value); /// @brief 往消息里添加字节数据 /// @param pack 消息 /// @param size 添加的数据长度 /// @param buffer 数据地址 /// @return status_t mec_put_bin(mec_message_t *pack, uint32 size, const void *buffer); -
将消息发出去,对应的接口为mec_send_data;
/// @brief 通过mec发送消息 /// @param pack /// @return status_t mec_send_data(mec_message_t *pack);消息发送除了调用mec_send_data发送数据到单个节点外,还可以使用广播接口将数据发送到所有节点。
/// @brief 通过mec广播一条消息 /// @param stream_id 流id /// @param inst_bits /// @param pack 消息 /// @param success_bits void mec_broadcast(uint32 stream_id, uint64 inst_bits[INSTS_BIT_SZ], mec_message_t *pack, uint64 success_bits[INSTS_BIT_SZ]); -
发送成功后,释放申请的包
/// @brief 释放消息的资源 /// @param pack void mec_release_pack(mec_message_t *pack);
比如发送一个MEC_CMD_BLOCK_NODE_RPC_REQ请求的流程如下:
status_t block_node_req(uint32 stream_id, uint32 node_id, uint32 block_time_ms) { mec_message_t pack; uint32 src_node = md_get_cur_node(); ///< 获取本节点的id ///< 申请一个包 CM_RETURN_IFERR(mec_alloc_pack(&pack, MEC_CMD_BLOCK_NODE_RPC_REQ, src_node, node_id, stream_id)); if (mec_put_int32(&pack, block_time_ms) != CM_SUCCESS) { ///< 往包里put数据 mec_release_pack(&pack); LOG_DEBUG_ERR("block node req, encode fail."); return CM_ERROR; } LOG_DEBUG_INF("send blockreq: stream=%u,src=%u,dst=%u,block_time=%u.", stream_id, src_node, node_id, block_time_ms); status_t ret = mec_send_data(&pack);///< 发送数据 mec_release_pack(&pack); ///< 释放包 return ret; }消息接收一般是在cmd注册的proc里面,当mec接收到消息,并根据消息类型将消息交给注册的proc处理时,就可以调用消息读取接口读取数据。读取数据也根据数据类型分为几类,支持的数据类型有int64、int32、int16、double、bin。
/// @brief 从消息中读取int64类型的数据 /// @param pack 消息 /// @param value 读取出来的值 /// @return status_t mec_get_int64(mec_message_t *pack, int64 *value); /// @brief 从消息中读取int32类型的数据 /// @param pack 消息 /// @param value 读取出来的值 /// @return status_t mec_get_int32(mec_message_t *pack, int32 *value); /// @brief 注册加密回调函数 /// @param cb_func 加密回调函数 /// @return status_t mec_register_decrypt_pwd(usr_cb_decrypt_pwd_t cb_func); /* need keep 4-byte align by the caller */ /// @brief 从消息中读取int16类型的数据 /// @param pack 消息 /// @param value 读取出来的值 /// @return status_t mec_get_int16(mec_message_t *pack, int16 *value); /// @brief 从消息中读取double类型的数据 /// @param pack 消息 /// @param value 读取出来的值 /// @return status_t mec_get_double(mec_message_t *pack, double *value); /// @brief 从消息中读取指定长度字节的数据 /// @param pack 消息 /// @param size 读取字节长度 /// @param buffer 数据存放地址 /// @return status_t mec_get_bin(mec_message_t *pack, uint32 *size, void **buffer);比如接收MEC_CMD_BLOCK_NODE_RPC_REQ的消息读取方式如下:
tatus_t block_node_req_proc(mec_message_t *pack) { uint32 stream_id = pack->head->stream_id; uint32 src_node_id = pack->head->src_inst; LOG_DEBUG_INF("recv blockreq: stream_id=%u, node_id=%u", stream_id, src_node_id); uint32 block_time_ms; CM_RETURN_IFERR(mec_get_int32(pack, (int32*)&block_time_ms));///< 读取int32数据 block_ack_t ack = SUCCESS_ACK; if (elc_get_node_role(stream_id) != DCF_ROLE_LEADER || set_node_status(stream_id, NODE_BLOCKED, block_time_ms) != CM_SUCCESS) { ack = ERROR_ACK; } CM_RETURN_IFERR(block_node_ack(stream_id, src_node_id, ack)); if (ack == ERROR_ACK) { return CM_SUCCESS; } LOG_DEBUG_INF("set node blocked, block_time_ms=%u.", block_time_ms); cm_event_notify(&g_node_status[stream_id].block.event); return CM_SUCCESS; } -
-
申请消息内存和释放消息接口
这两个接口一般在发包前调用消息申请接口,发包结束后调用消息释放接口。
/// @brief 释放消息的资源 /// @param pack void mec_release_pack(mec_message_t *pack); /// @brief 分配一个消息,在广播场景中,dst_inst 必须是 CM_INVALID_NODE_ID /// @param pack 消息指针 /// @param cmd 消息类型 /// @param src_inst 消息发出方 /// @param dst_inst 消息接收方 /// @param stream_id 流id /// @return status_t mec_alloc_pack(mec_message_t *pack, mec_command_t cmd, uint32 src_inst, uint32 dst_inst, uint32 stream_id); -
其他接口
mec对外提供的完整接口如下:
/// @brief 消息交换头部
typedef struct st_mec_message_head {
uint8 cmd; // command
uint8 flags;
uint16 batch_size; // batch size
uint32 src_inst; // from instance
uint32 dst_inst; // to instance
uint32 stream_id; // stream id
uint32 size;
uint32 serial_no;
uint32 frag_no;
uint32 version;
uint64 time1;
uint64 time2;
uint64 time3;
} mec_message_head_t;
/// @brief 消息体
typedef struct st_mec_message {
mec_message_head_t *head;
char *buffer;
uint32 buf_size;
uint32 aclt_size;
uint32 offset; // for reading
uint32 options; // options
} mec_message_t;
/// @brief 交换消息命令
typedef enum en_mec_command {
// normal cmd:
MEC_CMD_CONNECT = 0, ///< 连接请求
MEC_CMD_HEALTH_CHECK_HIGH = 1,
MEC_CMD_HEALTH_CHECK_LOW = 2,
MEC_CMD_APPEND_LOG_RPC_REQ = 3, ///< 日志添加请求
MEC_CMD_APPEND_LOG_RPC_ACK = 4, ///< 日志添加确认
MEC_CMD_VOTE_REQUEST_RPC_REQ = 5, ///< 投票请求
MEC_CMD_VOTE_REQUEST_RPC_ACK = 6, ///< 投票确认
MEC_CMD_GET_COMMIT_INDEX_REQ = 7, ///< 索引提交请求
MEC_CMD_GET_COMMIT_INDEX_ACK = 8, ///< 索引提交确认
MEC_CMD_PROMOTE_LEADER_RPC_REQ = 9, ///< 升主请求
MEC_CMD_BLOCK_NODE_RPC_REQ = 10,
MEC_CMD_BLOCK_NODE_RPC_ACK = 11,
MEC_CMD_SEND_COMMON_MSG = 12, ///< 发送通用消息
MEC_CMD_CHANGE_MEMBER_RPC_REQ = 13, ///< 成员变更请求
MEC_CMD_UNIVERSAL_WRITE_REQ = 14, ///< 通用写入请求
MEC_CMD_UNIVERSAL_WRITE_ACK = 15, ///< 通用写入确认
MEC_CMD_STATUS_CHECK_RPC_REQ = 16, ///< 状态检查请求
MEC_CMD_STATUS_CHECK_RPC_ACK = 17, ///< 状态检查确认
MEC_CMD_NORMAL_CEIL, // please add normal cmd before this
// test cmd:
MEC_CMD_TEST_REQ = MEC_CMD_NORMAL_CEIL + 1, ///< 测试请求
MEC_CMD_TEST_ACK = MEC_CMD_NORMAL_CEIL + 2, ///< 测试确认
MEC_CMD_TEST1_REQ = MEC_CMD_NORMAL_CEIL + 3,
MEC_CMD_TEST1_ACK = MEC_CMD_NORMAL_CEIL + 4,
MEC_CMD_BRD_TEST = MEC_CMD_NORMAL_CEIL + 5,
MEC_CMD_CEIL,
} mec_command_t;
/// @brief 交换消息数据类型
typedef enum en_mec_type {
TYPE_INT64, ///< 64位整数
TYPE_INT32, ///< 32位整数
TYPE_INT16, ///< 16位整数
TYPE_DOUBLE, ///< 双精度浮点数
TYPE_BINARY, ///< 二进制数据
} mec_type_t;
/// @brief 消息优先级
typedef enum en_msg_priv {
PRIV_HIGH = 0, ///< 高优先级消息 high priority message
PRIV_LOW = 1, ///< 低优先级消息 low priority message
PRIV_CEIL,
} msg_priv_t;
/// @brief 消息处理函数
typedef status_t(*msg_proc_t)(mec_message_t *pack);
/// @brief 注册消息处理函数
/// @param cmd 处理函数对应的消息类型
/// @param proc 消息类型对应的处理函数
/// @param priv 消息的优先级
void register_msg_process(mec_command_t cmd, msg_proc_t proc, msg_priv_t priv);
/// @brief 注销cmd类型的消息处理函数
/// @param cmd 消息类型
void unregister_msg_process(mec_command_t cmd);
#define INST_STEP (sizeof(uint64) * 8)
#define INSTS_BIT_SZ ((CM_MAX_NODE_COUNT - 1) / INST_STEP + 1)
#define MEC_SET_BRD_INST(bits, id) CM_BIT_SET((bits)[(id) / INST_STEP], CM_GET_MASK((id) % INST_STEP))
#define MEC_RESET_BRD_INST(bits, id) CM_BIT_RESET((bits)[(id) / INST_STEP], CM_GET_MASK((id) % INST_STEP))
#define MEC_IS_INST_SEND(bits, id) CM_BIT_TEST((bits)[(id) / INST_STEP], CM_GET_MASK((id) % INST_STEP))
#define MEC_INST_SENT_SUCCESS(bits, id) ((bits)[(id) / INST_STEP] |= ((uint64)0x1 << ((id) % INST_STEP)))
/// @brief 分配一个消息,在广播场景中,dst_inst 必须是 CM_INVALID_NODE_ID
/// @param pack 消息指针
/// @param cmd 消息类型
/// @param src_inst 消息发出方
/// @param dst_inst 消息接收方
/// @param stream_id 流id
/// @return
status_t mec_alloc_pack(mec_message_t *pack, mec_command_t cmd, uint32 src_inst, uint32 dst_inst, uint32 stream_id);
/// @brief 初始化mec
/// @return
status_t mec_init();
/// @brief 释放mec相关资源
void mec_deinit();
/// @brief 通过mec发送消息
/// @param pack
/// @return
status_t mec_send_data(mec_message_t *pack);
/* pack memory released by mec_broadcast itself, invoker no need to care */
/// @brief 通过mec广播一条消息
/// @param stream_id 流id
/// @param inst_bits
/// @param pack 消息
/// @param success_bits
void mec_broadcast(uint32 stream_id, uint64 inst_bits[INSTS_BIT_SZ], mec_message_t *pack,
uint64 success_bits[INSTS_BIT_SZ]);
/// @brief 释放消息的资源
/// @param pack
void mec_release_pack(mec_message_t *pack);
/// @brief 往消息里添加int64类型的数据
/// @param pack 消息
/// @param value 数据值
/// @return
status_t mec_put_int64(mec_message_t *pack, uint64 value);
/// @brief 往消息里添加int32类型的数据
/// @param pack 消息
/// @param value 数据值
/// @return
status_t mec_put_int32(mec_message_t *pack, uint32 value);
/// @brief 往消息里添加int16类型的数据
/// @param pack 消息
/// @param value 数据值
/// @return
status_t mec_put_int16(mec_message_t *pack, uint16 value);
/// @brief 往消息里添加double类型的数据
/// @param pack 消息
/// @param value 数据值
/// @return
status_t mec_put_double(mec_message_t *pack, double value);
/// @brief 往消息里添加字节数据
/// @param pack 消息
/// @param size 添加的数据长度
/// @param buffer 数据地址
/// @return
status_t mec_put_bin(mec_message_t *pack, uint32 size, const void *buffer);
/// @brief 从消息中读取int64类型的数据
/// @param pack 消息
/// @param value 读取出来的值
/// @return
status_t mec_get_int64(mec_message_t *pack, int64 *value);
/// @brief 从消息中读取int32类型的数据
/// @param pack 消息
/// @param value 读取出来的值
/// @return
status_t mec_get_int32(mec_message_t *pack, int32 *value);
/// @brief 注册加密回调函数
/// @param cb_func 加密回调函数
/// @return
status_t mec_register_decrypt_pwd(usr_cb_decrypt_pwd_t cb_func);
/* need keep 4-byte align by the caller */
/// @brief 从消息中读取int16类型的数据
/// @param pack 消息
/// @param value 读取出来的值
/// @return
status_t mec_get_int16(mec_message_t *pack, int16 *value);
/// @brief 从消息中读取double类型的数据
/// @param pack 消息
/// @param value 读取出来的值
/// @return
status_t mec_get_double(mec_message_t *pack, double *value);
/// @brief 从消息中读取指定长度字节的数据
/// @param pack 消息
/// @param size 读取字节长度
/// @param buffer 数据存放地址
/// @return
status_t mec_get_bin(mec_message_t *pack, uint32 *size, void **buffer);
/// @brief 获取发送队列长度
/// @param priv
/// @return
uint32 mec_get_send_que_count(msg_priv_t priv);
/// @brief 获取接收队列长度
/// @param priv
/// @return
uint32 mec_get_recv_que_count(msg_priv_t priv);
/// @brief 获取发送内存的容量
/// @param priv
/// @return
int64 mec_get_send_mem_capacity(msg_priv_t priv);
/// @brief 获取接收内存的容量
/// @param priv 消息优先级
/// @return
int64 mec_get_recv_mem_capacity(msg_priv_t priv);
/// @brief 检查所有的连接是否ok
/// @return
bool32 mec_check_all_connect();
/// @brief 检查消息交换是否就绪
/// @param stream_id 流id
/// @param dst_inst 目的节点
/// @param priv 消息优先级
/// @return
bool32 mec_is_ready(uint32 stream_id, uint32 dst_inst, msg_priv_t priv);
/// @brief 获取对端的消息交换模块版本
/// @param stream_id 流id
/// @param dst_inst 目的节点
/// @param peer_version 对端版本
/// @return
status_t mec_get_peer_version(uint32 stream_id, uint32 dst_inst, uint32 *peer_version);
/// @brief 获取接收消息中的版本号
/// @param pack
/// @return
static inline uint32 mec_get_recv_pack_version(const mec_message_t *pack)
{
return pack->head->version;
}
uint32 mec_get_write_pos(const mec_message_t *pack);
void mec_modify_int64(mec_message_t *pack, uint32 pos, uint64 value);
2.4 func
是一些主要函数的实现,此处不做展开。
2.5 queue
队列分为两类,一类是send_mq,另一类是recv_mq,称为发送上下文和接收上下文。队列上下文保存在全局的mec_instance_t中。
队列的数据结构如下:
/// @brief 消息队列上下文
typedef struct st_mq_context_t {
thread_t tasks[MEC_DEFALT_THREAD_NUM + 1]; ///< 线程id数组
task_arg_t work_thread_idx[MEC_DEFALT_THREAD_NUM + 1]; ///< 线程对应的任务参数
// msg queue for session background task, multiple queue to reduce contention
dtc_msgqueue_t queue[DTC_MSG_QUEUE_NUM + 1]; ///< 队列数组
dtc_msgitem_pool_t pool; ///< dtc消息队列池
dtc_msgqueue_t **channel_private_queue;
mec_profile_t *profile; ///< mec主要信息
void *mec_ctx; ///< mec 上下文
void *fragment_ctx; ///< 分片上下文
spinlock_t private_pool_init_lock; ///< 自旋锁
uint32 private_msg_pool_extent[PRIV_CEIL];
message_pool_t *private_pool[CM_MAX_NODE_COUNT][PRIV_CEIL]; ///< 私有消息池,对应高低优先级
message_pool_t msg_pool[PRIV_CEIL]; ///< 消息池
} mq_context_t;
message_pool_t利用指针数组来存储数据,其结构如下:
/// @brief 消息池
typedef struct st_message_pool {
spinlock_t lock;
uint32 msg_len; ///< 消息长度
char *extents[MSG_POOL_MAX_EXTENTS]; ///< extent(buffer)数组
volatile uint32 capacity; ///< 容量
uint32 count; ///< 大小
uint32 ext_cnt; ///< ext现有个数
uint32 free_first; ///< 第一个空闲ext索引
volatile uint32 free_count; ///< 空闲个数
volatile bool32 extending; ///< 正在extend
uint32 msg_pool_extent; ///< ext个数
cm_event_t event;
} message_pool_t;
其中实际数据存储在extents数组内,数组内的每一个指针又指向一段内存,每一段内存都申请了msg_pool_extent个item。
extents数组中的内存是按需申请分配的,当extent个数不够时,又会重新申请一段内存,每申请一次ext_cnt都会增加1,直到ext_cnt个数达到MSG_POOL_MAX_EXTENTS,或者说直到capacity达到最大值ext_cnt*msg_pool_extent。
实际的消息存放在msg_item_t里,而message_pool_t里的extents数组的每一个元素其实是msg_pool_extent个msg_item_t。
/// @brief 消息
typedef struct st_msg_item {
message_pool_t *pool; ///< 所属的pool
uint32 id; ///< id,用来索引
uint32 next; ///< 下一个item的索引
char buffer[0]; ///< 存放实际的数据
} msg_item_t;
dtc_msgitem_pool_t是消息队列池,与消息池不同,其结构如下
/// @brief 消息队列池
typedef struct st_dtc_msgitem_pool {
spinlock_t lock; ///< 自旋锁
dtc_msgitem_t *buffer[MAX_POOL_BUFFER_COUNT]; ///< 消息数组
uint16 buf_idx; ///< buf索引
uint16 hwm;
dtc_msgqueue_t free_list; ///< 缓存队列
} dtc_msgitem_pool_t;
2.5.1 初始化
需要初始化发送队列上下文和接收队列上下文。
2.5.2 运行
当上层应用主动发送消息时,消息会放到发送队列里。当agent执行pipe的recv job时,消息会放到接收队列里。
每一个队列有一个执行线程,在初次将消息放到队列里时会查看队列对应的执行线程是否启动,没有启动的话将会启动队列线程。队列线程的执行函数是dtc_task_proc。队列线程的执行和agent线程执行方式类似,也是采用对队列加锁,信号量通知的方式来实现。
在队列执行线程中,又跟队列是接收队列还是发送队列,分别交由不同的处理函数进行处理。
2.5.1.1 接收消息入队
接收消息入队是在pipe的recv job中入队的。具体函数为mec_proc_recv_msg。
mq_context_t *mq_ctx = get_recv_mq_ctx(); ///< 先找到接收队列上下文
message_pool_t *pool = &mq_ctx->msg_pool[pipe->priv]; ///< 根据pipe的优先级取出对应的消息池,后面会从消息池分配消息
先从priavte_pool里分配消息,
mec_alloc_msg_item逻辑比较复杂,下面是具体的流程:
#define MSG_ITEM_SIZE(pool) \
((pool)->msg_len + sizeof(msg_item_t)) \ ///< 每一个pool里的消息长度是相同的,分配的item是item长度加上消息长度
status_t mec_alloc_msg_item(message_pool_t *pool, msg_item_t **item)
{
*item = NULL; ///< 这个是外部传进来的二级指针,申请的内存赋值给它
for (;;) {
cm_spin_lock(&pool->lock, NULL);
if (pool->free_first != CM_INVALID_ID32) { ///< pool初始化free_first为CM_INVALID_ID32,这里表示pool初始状态
GET_FROM_FREE_LST(pool, *item); ///< 有空闲的直接从pool的空闲列表里申请
cm_spin_unlock(&pool->lock);
return CM_SUCCESS;
}
if (pool->count < pool->capacity) { ///< pool还没有满从pool里直接申请
ALLOC_FROM_POOL(pool, *item);
cm_spin_unlock(&pool->lock);
return CM_SUCCESS;
}
if (pool->extending) { ///< pool正在扩展需要休眠一下等待扩展完
cm_spin_unlock(&pool->lock);
cm_sleep(CM_SLEEP_1_FIXED);
continue;
}
pool->extending = CM_TRUE; ///< 扩展开始
cm_spin_unlock(&pool->lock);
if (pool->capacity >= MSG_POOL_MAX_EXTENTS * pool->msg_pool_extent) { /// pool的容量已经超过了最大扩展,扩展结束,返回成功
pool->extending = CM_FALSE;
return CM_SUCCESS;
}
size_t alloc_size = MSG_ITEM_SIZE(pool) * pool->msg_pool_extent; ///< 分配扩展个数
pool->extents[pool->ext_cnt] = malloc(alloc_size); ///< 最终分配的内存在extents数组里,
///< 每一个extent就是item+msg数组,数组大小为pool->msg_pool_extent
if (pool->extents[pool->ext_cnt] == NULL) { ///< 如果内存分配失败,返回失败
pool->extending = CM_FALSE;
CM_THROW_ERROR(ERR_ALLOC_MEMORY, alloc_size, "message items");
return CM_ERROR;
}
pool->capacity += pool->msg_pool_extent; ///< pool的容量增加
++pool->ext_cnt;///< 扩展extent
CM_MFENCE;
pool->extending = CM_FALSE;///< 扩展结束
LOG_DEBUG_INF("[MEC]alloc message item with pool extend, alloc_size:%zu ext_cnt:%u msg_pool_extent:%u "
"capacity:%u", alloc_size, pool->ext_cnt, pool->msg_pool_extent, pool->capacity);
}
return CM_SUCCESS;
}
item分配成功后,会把pack attach到item的数据内存buff上,此时pack引用了buff。
MEC_MESSAGE_ATTACH(&pack, get_mec_profile(), pipe->priv, item->buffer);
然后调用mec_read_message将数据读到pack里,再通过mec_process_message将pack放入队列。
status_t mec_process_message(const mec_pipe_t *pipe, mec_message_t *msg) ///< msg就是上面从网络IO里读取出的pack
{
dtc_msgqueue_t *my_queue = NULL;
mq_context_t *mq_ctx = get_recv_mq_ctx(); ///< 获取发送队列上下文
///< 根据收到的消息头里的stream_id找到channel id
uint32 channel_id = MEC_STREAM_TO_CHANNEL_ID(msg->head->stream_id, get_mec_profile()->channel_num);
///< 根据channel id和来源节点id找到对应的私有队列
my_queue = &mq_ctx->channel_private_queue[msg->head->src_inst][channel_id];
///< 从私有队列里分配一个dtc_msgitem_t(一个携带消息的双向链表节点)
dtc_msgitem_t *msgitem = mec_alloc_msgitem(mq_ctx, my_queue);
if (msgitem == NULL) {
LOG_DEBUG_ERR("[MEC]alloc message item failed, error code %d.", cm_get_os_error());
return CM_ERROR;
}
///< dtc_msgitem_t的消息指针指向msg的buffer
msgitem->msg = msg->buffer;
uint32 index = 0; ///< 默认放入的队列是0
if (pipe->priv == PRIV_LOW) { ///< 如果是低优先级,则队列索引为1
index = 1; // avoid concurrent attacks without affecting performance.
}
CM_MFENCE;
put_msgitem(&mq_ctx->queue[index], msgitem); ///< 将消息放入队列里(此时消息指针在两个地方,一个是private_queue,另一个是queue)
if (!mq_ctx->work_thread_idx[index].is_start) {
cm_spin_lock(&mq_ctx->work_thread_idx[index].lock, NULL);
if (!mq_ctx->work_thread_idx[index].is_start) {
if (cm_event_init(&mq_ctx->work_thread_idx[index].event) != CM_SUCCESS) {
LOG_RUN_ERR("[MEC]create thread %u event failed, error code %d.", index, cm_get_os_error());
cm_spin_unlock(&mq_ctx->work_thread_idx[index].lock);
return CM_ERROR;
}
if (cm_create_thread(dtc_task_proc, 0, (void *)&mq_ctx->work_thread_idx[index],
&mq_ctx->tasks[index]) != CM_SUCCESS) {
LOG_RUN_ERR("[MEC]create work thread %u failed.", index);
cm_spin_unlock(&mq_ctx->work_thread_idx[index].lock);
return CM_ERROR;
}
mq_ctx->work_thread_idx[index].is_start = CM_TRUE;
}
cm_spin_unlock(&mq_ctx->work_thread_idx[index].lock);
}
cm_event_notify(&mq_ctx->work_thread_idx[index].event); ///< 通知队列线程有新消息到来
return CM_SUCCESS;
}
2.5.1.2 发送消息入队
2.5.3 队列批处理
批量接收在队列线程的处理函数中,接收时需要先找到对应的队列,
uint32 queue_idx = arg->index % (DTC_MSG_QUEUE_NUM + 1); ///< 队列的索引根据放入时的索引对队列个数加1取余,实际取出的还是创建队列线程时对应的队列,避免取出非法索引队列
get_batch_msgitems(queue, &batch_queue, mq_ctx->profile->batch_size);
批量取出的逻辑如下:
- 首先上层可以配置批量处理的消息数量;
- 然后会比较批处理数量和队列消息数量的大小,若队列消息数量较多,则取出批处理数量的消息,若队列消息数量不足,则将队列消息全部取出;
- 队列采用双向链表实现,并且记录下了队列的头尾指针,批量出队主要就是更新头尾指针,以及头尾指针的双向指针;
- 最终出队的数据也是一个队列;
/// @brief 批量消息出队
/// @param queue 消息队列
/// @param batch 消息出队存放地址
/// @param batch_size 出队消息数量
void get_batch_msgitems(dtc_msgqueue_t *queue, dtc_msgqueue_t *batch, uint32 batch_size)
{
if (queue->count == 0) {
return;
}
cm_spin_lock(&queue->lock, NULL); // 访问前先加锁
if (queue->count == 0) {
cm_spin_unlock(&queue->lock);
return;
}
uint32 size = MIN(batch_size, queue->count); // 取出队数和队列实际数量的小值出队
batch->first = queue->first; // 将队头指针赋给bacth的队头
for (uint32 loop = 0; loop < size - 1; loop++) {
CM_ASSERT(queue->first->msg != NULL);
queue->first = queue->first->next;
} // 将队头指针往后移size个位置
batch->last = queue->first; // 此时队头指针已经达到要出队的位置,将队头赋值给batch的队尾
queue->first = queue->first->next; // 再讲队头往后移一个位置,因为之前的队头要出队
if (queue->first != NULL) { // 若队头不为null,此时队头前应该没有数据,设置队头的prev为null
queue->first->prev = NULL;
}
batch->last->next = NULL; // batch所有数据已取出,此时队尾后面应该没有数据,设置队尾的next为null
batch->count = size; // batch的大小为size
queue->count -= size; // 更新原队列大小
if (queue->count == 0) { // 若队列为空,重置队头队尾
queue->last = NULL;
queue->first = NULL;
}
cm_spin_unlock(&queue->lock);
return;
}
批量取出的消息只是队列的指针,并没有解析具体的消息。具体处理函数为dtc_proc_batch_recv,
dtc_msgitem_t *msg_item = batch_queue->first; ///< 从链表头节点开始进行处理
mec_message_head_t *head = NULL;
while (msg_item != NULL) { ///< 循环处理每一个节点
head = (mec_message_head_t *)msg_item->msg; ///< 将数据指针转换为消息指针
if (dtc_proc_batch(arg, head) != CM_SUCCESS) {
return;
}
mec_release_message_buf(msg_item->msg); ///< 每处理完一个链表节点,都将其buf释放掉
msg_item->msg = NULL;
msg_item = msg_item->next;
}
mec_message_head_t消息头中携带了批量数据的个数,先查看消息是否是多条。
int32 batch_size = head->batch_size; ///< 取出消息总条数
uint32 remain_size = (uint32)(head->size - sizeof(mec_message_head_t)); ///< 剩余消息条数
CM_ASSERT(batch_size > 1); ///< 批处理消息至少2条
msg_priv_t head_priv = CS_PRIV_LOW(head->flags) ? PRIV_LOW : PRIV_HIGH; ///< 消息的优先级
mec_message_head_t *temp_head = head + 1; ///< 下一条消息
while (batch_size > 0) { ///< 遍历消息直到消息处理完
CM_ASSERT(!CS_COMPRESS(temp_head->flags));
msg_priv_t cur_priv = CS_PRIV_LOW(temp_head->flags) ? PRIV_LOW : PRIV_HIGH; ///< 获取当前消息的优先级
if (cur_priv != head_priv || remain_size < temp_head->size ///< 剩余消息大小应大于当前节点消息大小
|| remain_size < (uint32)sizeof(mec_message_head_t)) { ///< 当前消息的优先级应该与头节点相同
///< 剩余消息应大于mec_message_head_t长度
LOG_DEBUG_ERR("[MEC]batchc err: cur_priv %u, head_priv %u, cur_size %u, remain_size %u, src %u",
cur_priv, head_priv, temp_head->size, remain_size, head->src_inst);
return CM_ERROR;
}
dtc_recv_proc(mec_ctx, fragment_ctx, temp_head);
temp_head = (mec_message_head_t *)((char *)temp_head + temp_head->size); ///< 移动指针
batch_size--;
remain_size -= temp_head->size;
}
每次处理消息需要根据控制消息查看是否需要合并包,
mec_message_t pack;
///< 检查来源节点和流是否存在
if (md_check_stream_node_exist(head->stream_id, head->src_inst) != CM_SUCCESS) {
LOG_DEBUG_ERR("[MEC]eachhead: invalid stream_id %u or src_inst %u", head->stream_id, head->src_inst);
return;
}
///< 检查消息是否发往本节点
if (SECUREC_UNLIKELY(head->dst_inst != md_get_cur_node())) {
LOG_DEBUG_ERR("[MEC]eachhead: dst_inst %u is not me.", head->dst_inst);
return;
}
///< 检查消息cmd是否合法
if (SECUREC_UNLIKELY(head->cmd >= MEC_CMD_CEIL)) {
LOG_DEBUG_ERR("[MEC]invalid mec command %u", head->cmd);
return;
}
///< 获取对应cmd的process函数进行处理
msg_proc_t proc = mec_ctx->cb_processer[head->cmd].proc;
if (SECUREC_UNLIKELY(proc == NULL)) {
LOG_DEBUG_ERR("[MEC]no message handling function is registered for message type %u", head->cmd);
return;
}
head->time2 = g_timer()->now;
g_mec_perf_stat.recv_count++;
g_mec_perf_stat.recv_delay += head->time2 - head->time1;
stat_record(RECV_DELAY, head->time2 - head->time1);
///< 根据消息头的控制位区分是否还有更多消息
if (CS_MORE_DATA(head->flags)) {
dtc_proc_more_data(fragment_ctx, head); ///< 处理分片
} else if (CS_END_DATA(head->flags)) { ///< 处理最后一个包
dtc_proc_end_data(mec_ctx, proc, fragment_ctx, head); ///< 分片结束,合包
} else {
MEC_MESSAGE_ATTACH2(&pack, (char *)head);
mec_init_get(&pack);
///< 处理消息
if (proc(&pack) != CM_SUCCESS) {
int32 code = 0;
const char *message = NULL;
cm_get_error(&code, &message);
LOG_DEBUG_WAR("[MEC]proc message failed,src[%d],dst[%d],cmd[%u],stream id[%u],err code %d, err msg %s",
head->src_inst, head->dst_inst, head->cmd, head->stream_id, code, code == 0 ? "N/A" : message);
}
}
处理分片时,分片使用hash来保存,使用节点id,流id和序列号来计算hash。
fragment_key_t key;
FILL_FRAGMENT_KEY(head, key); ///< 初始化key
uint32 hash_key = cm_hash_bytes((const uint8 *)&key, sizeof(fragment_key_t), FRAGMENT_BUCKETS); ///< 计算hash值
fragment_bucket_t *bucket = &fragment_ctx->buckets[hash_key];
fragment_ctrl_t *ctrl = NULL;
uint32 del_sn;
ctrl = find_fragment_ctrl(bucket, &key);
if (head->frag_no == 0) { ///< 如果是第一个报文直接插入分片里
if (insert_fragment_pack(head, bucket) != CM_SUCCESS) {
LOG_DEBUG_WAR("[MEC]first_frag insert fail. src inst[%d], frag_no[%u], serial no[%u], batch size[%u], "
"err code %d, err msg %s",
head->src_inst, head->frag_no, head->serial_no, head->batch_size,
cm_get_error_code(), cm_get_errormsg(cm_get_error_code()));
return;
}
} else { ///< 不是第一个报文则需要进行合包
if (concat_fragment_pack(ctrl, head) != CM_SUCCESS) {
LOG_DEBUG_WAR("[MEC]non_first_frag concat fail. src inst[%d], frag_no[%u], serial no[%u], batch size[%u], "
"err code %d, err msg %s",
head->src_inst, head->frag_no, head->serial_no, head->batch_size,
cm_get_error_code(), cm_get_errormsg(cm_get_error_code()));
goto error;
}
cm_spin_unlock(&ctrl->lock);
}
2.6 reactor
mec总共有两个reactor,一个是高优先级,一个是低优先级。与之相对应,agent也有两个,高优先级和低优先级。
每一个reactor是一个线程,负责监听channel的pipe是否有事件到来。可以通过MEC_REACTOR_THREAD_NUM来配置reactor线程个数。
reactor线程与agent线程不同,reactor线程是一开始就全部创建好了,不会按需创建,reactor线程也不是线程池的模式,每个reactor线程就是明确做一件事,监听socket是否有事件就绪并交给agent去处理。
每一个channel有两个pipe,一个高优先级,一个低优先级。
/// @brief
typedef struct st_reactor {
uint32 id;
thread_t thread; ///< reactor 线程id
int epollfd; ///< epoll id
atomic32_t channel_count; ///< 通道数
uint32 avg_oagents;
reactor_status_t status; ///< 状态
agent_pool_t *agent_pool; ///< 代理池
} reactor_t;
reactor初始化时,创建一个reactor就是创建一个线程,每一个线程执行的是一个循环,用epoll_wait监听是否有socket准备就绪。
while (!thread->closed) {
reactor_handle_events(reactor);
if (reactor->status == REACTOR_STATUS_PAUSING) {
reactor->status = REACTOR_STATUS_PAUSED;
}
}
nfds = epoll_wait(reactor->epollfd, events, EV_WAIT_NUM, EV_WAIT_TIMEOUT);
if (nfds == -1) {
if (errno != EINTR) {
LOG_RUN_ERR("[MEC]Failed to wait for connection request, OS error:%d", cm_get_os_error());
}
return;
}
if (nfds == 0) {
return;
}
for (loop = 0; loop < nfds; ++loop) {
/*处理就绪的socket */
}
每就绪一个socket,这里其实就是pipe,就会将其放到一个agent里去执行。
2.6.1 添加pipe
acceptor每接收到一个客户端的连接,就会创建一个pipe,并将这个pipe添加到一个reactor的监听列表里。
2.6.2 执行pipe
reactor线程会监听添加进来的pipe,并把有事件到来的取出附着到agent中运行。附着到agent后,reactor会调用cm_event_notify向agent发送信号量,激活一个agent线程来处理pipe的job。
3. protocol
协议层主要包含tcp和ssl的相关收发包实现以及服务端监听实现。
实际收发包函数
typedef struct st_vio {
recv_func_t vio_recv;
send_func_t vio_send;
wait_func_t vio_wait;
recv_timed_func_t vio_recv_timed;
send_timed_func_t vio_send_timed;
} vio_t;
static const vio_t g_vio_list[] = {
{ NULL, NULL, NULL, NULL, NULL },
// TCP io functions
{ (recv_func_t)cs_tcp_recv, (send_func_t)cs_tcp_send, (wait_func_t)cs_tcp_wait,
(recv_timed_func_t)cs_tcp_recv_timed, (send_timed_func_t)cs_tcp_send_timed },
// SSL io functions
{ (recv_func_t)cs_ssl_recv, (send_func_t)cs_ssl_send, (wait_func_t)cs_ssl_wait,
(recv_timed_func_t)cs_ssl_recv_timed, (send_timed_func_t)cs_ssl_send_timed },
};
3.1 listener
listener主要负责监听socket并accept,accept包括系统调用accept(即tcp三次握手),又包含应用层accept(pipe连接)。
3.1.1 系统调用accept
mec采用reactor模式实现,listener主要是实现acceptor的功能,负责监听socket,并接受客户端的连接。接受连接后创建pipe,并将其添加到reactor中,由reactor负责后续的读写事件监听。listener实际上也是一个epoll_wait的循环,但其只提供监听接受连接的功能,即accept系统调用。
创建完socket后会启动一个线程来处理客户端的连接请求,处理函数为srv_tcp_lsnr_proc。该函数是一个epoll_wait的循环,会监听对应的socket事件并进行处理。
创建监听后,accept完成后会将mec_tcp_accept保存在tcp_lsnr_t的action里,会在创建pipe时调用。在acceptor的执行线程里完成accept后,会执行action并将pipe放入reactor中。
3.1.2 应用层accept
tcp连接建立后,客户端(主动建连接的一方)会立即发送proto_code,acceptor需要校验协议码是否正确,确认协议码后需要发送link_ready_ack_t回复对端连接准备就绪。
客户端收到link_ready_ack_t后,接着会发送mec_message_head_t,发送连接请求。
acceptor端收到mec_message_head_t,会校验连接消息。
需要注意的是此时的消息收发处理还没有转交到reactor处理。
mec_message_head_t消息里会携带src_inst和stream_id,分别表示来源实例id和流id,对应到本端其实就是节点id和channel id,根据这两个参数就可以唯一确定一个channel。
并跟据mec_message_head_t消息里的flags确定是高优先级pipe还是低优先级,然后找到pipe,最终需要把pipe交给reactor去处理。
channel = &mec_ctx->channels[head.src_inst][head.stream_id]; ///< 找到一个channel
msg_priv_t priv = CS_PRIV_LOW(head.flags) ? PRIV_LOW : PRIV_HIGH; ///< 根据flags确定是高优先级pipe还是低优先级
mec_pipe_t *mec_pipe = &channel->pipe[priv]; ///< 找到pipe
3.2 packet
packet主要是实现了大小端转换。
3.3 ssl
ssl主要是使用openssl加密tcp通信数据。
3.4 pipe
集群节点之间实际是通过channel通信,而channel又是通过pipe来通信,这里的pipe指的是mec_pipe_t。在集群中两个节点之间实际是有两条通信链路的,每个节点都是既作为客户端,也作为服务端。
pipe是channel具体的通信单元,也是通信的最小模块,实际各个实例(节点)之间就是通过pipe来通信。pipe的job(行为)主要分为两类,SEND_MODE和RECV_MODE。
pipe在其内部又划分为两类,send_pipe和recv_pipe,send_pipe用于客户端,用于主动连接,recv_pipe用于服务端,用于接受客户端的请求。
/// @brief mec管道
typedef struct st_mec_pipe {
thread_lock_t send_lock; ///< 发送锁
thread_lock_t recv_lock; ///< 接收锁
thread_lock_t recv_epoll_lock;
struct {
volatile uint16 is_reg : 1; ///< 是否注册
volatile uint16 recv_pipe_active : 1; ///< 接收pipe是否激活
volatile uint16 send_pipe_active : 1; ///< 发送pipe是否激活
uint16 priv : 1;
volatile uint16 try_connet_count : 12;
};
cs_pipe_t send_pipe; ///< 发送连接通道
cs_pipe_t recv_pipe; ///< 接收连接通道
atomic32_t send_need_close;
atomic32_t recv_need_close;
struct st_reactor *reactor;
struct st_mec_channel *channel;
attach_info_t attach[MODE_END]; ///< pipe的job(send、recv),agent线程的执行函数信息
} mec_pipe_t;
3.4.1 pipe的连接
3.4.1.1 客户端
pipe是建立在tcp上层的应用协议,在tcp建立成功后,还需要建立pipe的连接,最终是在pipe的发送job函数mec_proc_send_pipe中完成。
pipe的send_pipe连接大致分为三步:
-
首先建立tcp连接,tcp connect成功后,发送protocol code;
协议码是一个魔数,主要是为了与其他通信协议做区分,防止网络数据的干扰。
-
对端收到协议码后会回复link_ready_ack,等待对端回复link_ready_ack,对端的响应了会包含大小端、版本号;
-
收到对端回复link_ready_ack后确认双方tcp链路正常后,需要发送pipe的connect信息,发送mec_message_head_t,主要是发送本地channel信息;发送完pipe的connect请求后,本端的send_pipe激活就完成了。
#define FILL_CONNECT_HEAD(head, profile, channel, pipe) \ do { \ (head).cmd = MEC_CMD_CONNECT; \ ///< 命令类型 (head).src_inst = (profile)->inst_id; \ ///< 实例(节点)id (head).stream_id = MEC_CHANNEL_ID((channel)->id); \ ///< channel id (head).size = sizeof(mec_message_head_t); \ ///< 消息长度 (head).flags = ((pipe)->priv == PRIV_HIGH ? 0 : CS_FLAG_PRIV_LOW); \ ///< pipe类型 (head).serial_no = cm_atomic32_inc(&(channel)->serial_no); \ ///< channel序列号 if (CS_DIFFERENT_ENDIAN((pipe)->send_pipe.options)) { \ ///< 大小端转换 (head).src_inst = cs_reverse_uint32((head).src_inst); \ (head).stream_id = cs_reverse_uint32((head).stream_id); \ (head).size = cs_reverse_uint32((head).size); \ (head).serial_no = cs_reverse_uint32((head).serial_no); \ } \ } while (0)
在mec初始化时,主线程会连接所有的channel,也就是会连接pipe。此时会将所有pipe都attach到agent上,并将pipe类型设置为SEND_MODE,attach成功后调用cm_event_notify通知agent执行pipe的job。此时会执行mec_proc_send_pipe。
3.4.1.2 服务端
服务端的连接请参考listener。
3.4.2 pipe的执行
在socket层面来说,pipe共有两个socket,一个用于发送,一个用于接收。每两个节点之间建立pipe时,都需要建立两个socket。比如节点1和节点2,对于节点1来说,节点1会主动连接节点2,建立socket1,用于发送。同时节点2也会主动连接节点1,建立socket2,用于接收。即在pipe层面建立的socket的数据收发都是单向的,一个socket仅用于发,另外一个socket仅用于收。
每一个pipe都会有两个job,一个发送job,一个接收job,这讲个job对应socket的收发行为。对于发送job来说,其socket连接是主动建立的,且socket只用于发送,发送也是主动建立的,因而不需要监听,即不需要将发送socket加入到reactor里,只需要每次发送前检查链路是否连接,未连接的话需要建立连接。
而对于接收job来说,在acceptor建立tcp连接后,就需要把创建的socket添加到reactor里,由reactor负责监听,但有事件到来后(收包),将pipe附着到agent上运行,此时执行的就是pipe的接收job。
3.4.2.1 发送
对于发送来说,主要就是进行send_pipe的连接。连接请查看3.4.1pipe的连接。
3.4.2.2 接收
pipe的接收job并不负责实际消息的处理,而是将消息放到消息队列里面,由队列线程进行处理。
3.5 tcp
tcp模块实现了tcp的收发包,创建socket,配置socket等功能。最终的收发包出入口都在本模块里。
4. 数据收发
在整个mec模块中,数据收发都是通过队列来进行的,发送时会将数据发送到队列里,等累积一定消息后批量进行发送;接收消息时,接收到的消息也是先放入消息队列中。
4.1 消息
/// @brief 消息交换头部
typedef struct st_mec_message_head {
uint8 cmd; ///< 消息请求类型
uint8 flags; ///< 状态标志
uint16 batch_size; ///< 批量消息条数
uint32 src_inst; ///< 来源id(源节点id)
uint32 dst_inst; ///< 目的节点id
uint32 stream_id; ///< 流id(channel id)
uint32 size; ///< 消息长度
uint32 serial_no; ///< channel序列号
uint32 frag_no; ///< 分片序列号
uint32 version; ///< 协议版本
uint64 time1;
uint64 time2;
uint64 time3;
} mec_message_head_t;
flags的bit位用于存放消息的控制信息,
#define CS_FLAG_NONE 0x0000 ///< 没有控制信息
#define CS_FLAG_MORE_DATA 0x0001 ///< 需要接收更多消息
#define CS_FLAG_END_DATA 0x0002 ///< 最后一条消息
#define CS_FLAG_PEER_CLOSED 0x0004 ///< 对端关闭
#define CS_FLAG_COMPRESS 0x0008 ///< 压缩标志
#define CS_FLAG_PRIV_LOW 0x0010 ///< 低优先级消息
#define CS_FLAG_BATCH 0x0020 ///< 批量发送消息
消息也有自己的消息池,消息池又分为private pool和msg_pool。
4.2 数据发送
数据发送就是把数据放入对应channel的发送队列中,等待队列线程进行批量发送。
放入私有队列
my_queue = &mq_ctx->channel_private_queue[head->dst_inst][channel_id]; ///< 根据目的节点id和channel id找到队列
放入queue,如果是低优先级根据目的实例id和channel id来计算hash;如果是高优先级放在第一个队列里。
uint32 index = 0;
if (CS_PRIV_LOW(head->flags)) {
index = cm_hash_uint32((head->dst_inst & 0xFFFFFF) | (channel_id << 24), DTC_MSG_QUEUE_NUM) + 1;
}
每一个队列对应一个消息处理线程,若队列线程没有启动的话还需要启动队列线程。
将消息放入队列后,需要发送信号通知队列线程有新任务到来。
4.3 数据接收
数据接收请参考3.4.2pipe的执行。数据接收处理实际是在pipe的接收job中执行的,具体的执行函数是mec_proc_recv_pipe。
消息处理流程大致如下:
- 先读取消息头,获取消息体长度;
- 再根据消息体长度读取消息体;
- 将消息放入队列;
将消息放入队列时,需要先找到队列的索引。
mq_context_t *mq_ctx = get_recv_mq_ctx(); ///< 获取了发送队列上下文
uint32 index = 0; ///< 默认放入的是索引为0的队列
if (pipe->priv == PRIV_LOW) { ///< 如果队列是低优先级,默认放入的是索引为1的队列
index = 1; // avoid concurrent attacks without affecting performance.
}
CM_MFENCE;
put_msgitem(&mq_ctx->queue[index], msgitem); ///< 放入队列
消息放入队列后,就由队列线程来处理。
5. FAQ
5.1 代码层面如何区分channel中高低优先级?
从一开始,mec初始化完成后,就已经创建好了高优先级的reactor、agent以及低优先级的reactor、agent,对于每一个channel,也都创建好了高优先级的pipe和低优先级的pipe。也就是说通道从一开始就建立好了,看上层的消息期望使用哪个通道来发送消息。
5.4.1 消息的优先级
channel的优先级与消息的优先级有关,消息的优先级在注册消息处理函数时候就确定了。
/// @brief 注册消息处理函数,将消息注册到mec上下文的回调里,当收到相关请求类型的数据时,会调用proc函数进行处理
/// @param cmd 处理函数对应的消息类型
/// @param proc 消息类型对应的处理函数
/// @param priv 消息的优先级(高优先级或者低优先级)
void register_msg_process(mec_command_t cmd, msg_proc_t proc, msg_priv_t priv)
{
mec_context_t *mec_ctx = get_mec_ctx();
if (cmd >= MEC_CMD_CEIL) {
return;
}
mec_ctx->cb_processer[cmd].priv = priv;
mec_ctx->cb_processer[cmd].proc = proc;
}
高优先级的消息和低优先级的消息差别在分配包填充控制信息时,高优先级的消息是不进行压缩传输的,而低优先级的消息若设置了压缩则会压缩进行传输。
msg_priv_t priv = mec_ctx->cb_processer[cmd].priv; ///< 获取cmd类型消息的优先级
if (get_mec_profile()->algorithm != COMPRESS_NONE && priv) {
head->flags |= CS_FLAG_COMPRESS; ///< 低优先级消息配置压缩算法后需要设置压缩标志
}
根据消息优先级的不同,其放入队列的位置也不同。高优先级消息放入索引为0的队列,低优先级消息放入索引非0的其他队列。
uint32 index = 0;
if (CS_PRIV_LOW(head->flags)) {
index = cm_hash_uint32((head->dst_inst & 0xFFFFFF) | (channel_id << 24), DTC_MSG_QUEUE_NUM) + 1;
}
put_msgitem(&mq_ctx->queue[index], msgitem);
DTC_MSG_QUEUE_NUM的值是16,也就是说,高优先级队列只有一个,就是第一个,低优先级队列有15个。这样的话,高优先级消息就不会和低优先级消息竞争。
根据消息优先级的不同,消息的buf大小也不一样。
uint32 buf_size = (priv == PRIV_LOW) ? MEC_ACTL_MSG_BUFFER_SIZE(get_mec_profile()) : MEC_PRIV_MESSAGE_BUFFER_SIZE;
5.1.1 接收
接收时消息携带的消息头中包含的stream_id和src_inst可以确定一个channel,消息头中flags包含了消息是高优先级还是低优先级。
channel = &mec_ctx->channels[head.src_inst][head.stream_id];
msg_priv_t priv = CS_PRIV_LOW(head.flags) ? PRIV_LOW : PRIV_HIGH;
mec_pipe_t *mec_pipe = &channel->pipe[priv];
根据消息的优先级,会将pipe放到不同等级的reactor里。
if (reactor_register_pipe(mec_pipe, get_mec_reactor(priv)) != CM_SUCCESS) {
LOG_RUN_ERR("[MEC]register channel %u priv %u to reactor failed.", channel->id, priv);
return CM_ERROR;
}
5.1.2 发送
发送时消息携带的消息头中包含的stream_id和dst_inst可以确定一个channel,消息头中flags包含了消息是高优先级还是低优先级。
在发送时,首先根据stream_id和dst_inst确定channel,确定方式为stream_id对channel个数取余数。
#define MEC_STREAM_TO_CHANNEL_ID(stream_id, channel_num) (uint8)((stream_id) % (channel_num))
uint32 channel_id = MEC_STREAM_TO_CHANNEL_ID(head->stream_id, profile->channel_num);
mec_channel_t *channel = &mec_ctx->channels[head->dst_inst][channel_id];///< 取出channel
确定channel后,根据应用设定的包的优先级选取对应的pipe,判断对应的pipe是否已经连接激活,未连接激活直接返回错误,本次发送失败。
msg_priv_t priv = CS_PRIV_LOW(head->flags) ? PRIV_LOW : PRIV_HIGH;
if (!channel->pipe[priv].send_pipe_active) {
LOG_DEBUG_ERR("[MEC]data send_pipe to dst_inst[%u] priv[%u] is not ready.", head->dst_inst, priv);
return CM_ERROR;
}
5.2 五大组件的关系图?
5.3 收发pipe是否都需要激活
收发pipe必须要激活才能进行正常接收发送数据。
若只激活send pipe则只可以发送数据,不可以接收数据。
若只激活recv pipe则只可以接收数据,不可以发送数据。
5.4 网络超时时间如何设置
超时时间参数如下,在初始化channel的时候初始化,
pipe->send_pipe.connect_timeout = profile->connect_timeout; ///< 发送pipe连接超时时间
pipe->send_pipe.socket_timeout = profile->socket_timeout; ///< 发送pipe socket接收发送超时时间
pipe->recv_pipe.connect_timeout = profile->connect_timeout; ///< 接收pipe连接超时时间
pipe->recv_pipe.socket_timeout = profile->socket_timeout; ///< 接收pipe socket接收发送超时时间
pipe->send_pipe.l_onoff = 1; ///< 0=off, 1=on(开关)
pipe->send_pipe.l_linger = 1; ///< 延时时间
在默认情况下,当调用close关闭socke的使用,close会立即返回。但是,如果send buffer中还有数据,系统会试着先把send buffer中的数据发送出去,然后close才返回。SO_LINGER选项则是用来修改这种默认操作的。
当l_onoff被设置为0的时候
将会关闭SO_LINGER选项,即TCP或则SCTP保持默认操作:close立即返回,底层会将未发送完的数据发送完成后再释放资源,也就是优雅的退出。
l_onoff值非0,l_linger = 0
当调用close的时候,TCP连接会立即断开。send buffer中未被发送的数据将被丢弃,并向对方发送一个RST信息。值得注意的是,由于这种方式,是非正常的4中握手方式结束TCP链接,所以,TCP连接将不会进入TIME_WAIT状态。这样就可以解决过多的的TIME_WAIT导致资源不足的问题,但是这样会导致新建立的可能和就连接的数据造成混乱。设置 l_onoff 为非0,l_linger为非0
当套接口关闭时内核将拖延一段时间(由l_linger决定)。如果套接口缓冲区中仍残留数据,进程将处于睡眠状态,直 到(a)所有数据发送完且被对方确认,之后进行正常的终止序列(描述字访问计数为0)或(b)延迟时间到。此种情况下,应用程序检查close的返回值是非常重要的,如果在数据发送完并被确认前时间到,close将返回EWOULDBLOCK错误且套接口发送缓冲区中的任何数据都丢失。close的成功返回仅告诉我们发送的数据(和FIN)已由对方TCP确认,它并不能告诉我们对方应用进程是否已读了数据。如果套接口设为非阻塞的,它将不等待close完成。
5.4.1 客户端(主动发起连接)
-
设置接收发送缓冲区
/// 默认接收发送缓冲区均未64M (void)setsockopt(sock, SOL_SOCKET, SO_SNDBUF, (char *)&send_size, sizeof(uint32)); (void)setsockopt(sock, SOL_SOCKET, SO_RCVBUF, (char *)&recv_size, sizeof(uint32)); -
设置连接超时时间
///< 超时时间为 profile->connect_timeout (void)setsockopt(sock, SOL_SOCKET, SO_SNDTIMEO, (char *)&tv, sizeof(tv)); (void)setsockopt(sock, SOL_SOCKET, SO_RCVTIMEO, (char *)&tv, sizeof(tv));设置号超时时间后,会尝试connect,若connect失败了,则会会计算一个超时结束时间用poll(linux)或select(windows)重新尝试连接。
ret = connect(link->sock, SOCKADDR(&link->remote), link->remote.salen); if (ret < 0) { // 若connect失败,则会计算一个超时结束时间用poll或select重新尝试连接 if (sock_attr->connect_timeout < 0) { end_time = -1; } else { end_time = cm_current_time() + sock_attr->connect_timeout / (int32)MILLISECS_PER_SECOND; } error_no = cm_get_os_error(); if (cs_tcp_connect_wait(link, error_no, end_time) == CM_SUCCESS) { ret = 0; } }使用poll或者select设置超时时间来进行连接。
#ifndef WIN32 return poll(fds, nfds, timeout); ///< timeout时间内还没有事件发生将返回 #else fd_set wfds; fd_set rfds; fd_set efds; struct pollfd *pfds = fds; struct timeval tv, *tvptr = NULL; FD_ZERO(&rfds); FD_ZERO(&wfds); FD_ZERO(&efds); if (timeout >= 0) { tv.tv_sec = timeout / CM_TIME_THOUSAND_UN; tv.tv_usec = (timeout % CM_TIME_THOUSAND_UN) * CM_TIME_THOUSAND_UN; tvptr = &tv; } cs_tcp_poll_set_fd(pfds, nfds, &wfds, &rfds, &efds); return (int32)select((int)(pfds->fd + 1), &rfds, &wfds, &efds, tvptr);///< timeout时间内还没有事件发生将返回 #endif -
连接成功后,会重设socket的超时时间,将超时时间设置为0。
struct timeval tv = { 0, 0 }; (void)setsockopt(sock, SOL_SOCKET, SO_SNDTIMEO, (char *)&tv, sizeof(tv)); (void)setsockopt(sock, SOL_SOCKET, SO_RCVTIMEO, (char *)&tv, sizeof(tv)); -
设置io模式,设置IO为非阻塞IO,配置TCP_NODELAY
void cs_set_io_mode(socket_t sock, bool32 nonblock, bool32 nodelay) { tcp_option_t option; option = nonblock ? 1 : 0; (void)cs_ioctl_socket(sock, FIONBIO, &option); option = nodelay ? 1 : 0; (void)setsockopt(sock, IPPROTO_TCP, TCP_NODELAY, (char *)&option, sizeof(option)); }
TCP_NODELAY选项是用来控制是否开启Nagle算法,该算法是为了提高较慢的广域网传输效率,减小小分组的报文个数。
要求一个TCP连接上最多只能有一个未被确认的小分组,在该小分组的确认到来之前,不能发送其他小分组。
-
设置keepalive参数,默认keepalive配置为idle120s,interval为5s,keepalive次数为3次。也就是链路之间最长120+5*3=135秒内没有数据交互就会关闭连接。
tcp_option_t option; option = 1; (void)setsockopt(sock, SOL_SOCKET, SO_KEEPALIVE, (void *)&option, sizeof(int32)); (void)setsockopt(sock, SOL_TCP, TCP_KEEPIDLE, (void *)&idle, sizeof(int32)); (void)setsockopt(sock, SOL_TCP, TCP_KEEPINTVL, (void *)&interval, sizeof(int32)); (void)setsockopt(sock, SOL_TCP, TCP_KEEPCNT, (void *)&count, sizeof(int32)); -
设置SO_LINGER,设置关闭TCP连接时的行为,设置关闭连接时等待发送缓存区的数据被发送出去的时间,当前配置为1秒。
struct linger so_linger; so_linger.l_onoff = l_onoff; so_linger.l_linger = l_linger; (void)setsockopt(sock, SOL_SOCKET, SO_LINGER, (char *)&so_linger, sizeof(struct linger));
5.4.2 服务端(接受连接的一方)
与客户端设置类似,服务端在接收到一个客户端请求并创建socket后,会对socket设置IO模式,buffer大小,keepalive,SO_LINGER,这些配置与客户端设置方式一致。
5.4.3 消息收发超时
在每次消息接收时,都会设置超时时间来进行接收,超时机制是利用poll来设置,即每一次读取都会调用poll等待直到数据到来或者超时返回。
/// @brief 等待tcp套接字事件成功或者超时
/// @param link tcp连接信息
/// @param wait_for 等待事件类型,读或写
/// @param timeout 超时时间
/// @param ready 是否准备好
/// @return
status_t cs_tcp_wait(tcp_link_t *link, uint32 wait_for, int32 timeout, bool32 *ready)
在读取消息时,若消息还没有全部读完,会循环读取,每次读取都会设置超时时间,读取数据的默认超时时间为50ms。然后会累积读取超时时间,如果时间累积到socket_timeout则会认为读取超时。
while (remain_size > 0) {
if (cs_wait(pipe, CS_WAIT_FOR_READ, CM_POLL_WAIT, &ready) != CM_SUCCESS) { ///< 每次读取都带超时时间去读
return CM_ERROR;
}
if (!ready) { /// 会累积超时时间
wait_interval += CM_POLL_WAIT;
if (wait_interval >= pipe->socket_timeout) {///< 当时间累积超过socket_timeout出错返回
CM_THROW_ERROR(ERR_TCP_TIMEOUT, "recv data");
return CM_ERROR;
}
continue;
}
if (VIO_RECV(pipe, read_buf, remain_size, &read_size, &wait_event) != CM_SUCCESS) {
return CM_ERROR;
}
read_buf += read_size;
remain_size -= read_size;
}
5.5 批处理的消息逻辑,怎么确定一次处理多少条消息
请查看队列章节2.5.3 队列批处理。
5.6 发送失败后的诊断
对于应用层来说,将消息放入队列就是成功,只有返回值标识是否成功。返回成功也并不表示消息一定发送出去了。
应用层是通过应用层消息的确认来判断消息实际是否发送成功。
暂时不提供发送失败的诊断信息,若开启了debug日志级别,会有日志打印。
5.7 网络消息干扰,如何识别非本节点消息
在收到消息后会校验消息头部,会检查stream_id是否合法,src_inst是否合法以及来源节点id和目的节点id是否正确。
if (md_check_stream_node_exist(head->stream_id, head->src_inst) != CM_SUCCESS
|| head->src_inst == cur_node || head->dst_inst != cur_node) {
LOG_DEBUG_ERR("[MEC]rcvhead: invalid stream_id %u or src_inst %u or dst_inst %u, cur=%u",
head->stream_id, head->src_inst, head->dst_inst, cur_node);
return CM_ERROR;
}
if (SECUREC_UNLIKELY(head->cmd >= MEC_CMD_CEIL)) {
LOG_DEBUG_ERR("[MEC]rcvhead:invalid msg command %u", head->cmd);
return CM_ERROR;
}
if (SECUREC_UNLIKELY(mec_ctx->cb_processer[head->cmd].proc == NULL)) {
LOG_DEBUG_ERR("[MEC]rcvhead:no message handling function registered for message type %u", head->cmd);
return CM_ERROR;
}
5.8 agent执行job结束的标志,接收多少数据结束
agent执行job时,若是发送job,将一条消息发送结束后,job结束。
若是接收job,先接收消息头,再接收消息体,一条消息接收结束后,job结束。
reference
- https://blog.csdn.net/qq_38537501/article/details/118310363