PID参数解析+调参经验笔记(经验法)
在最前面推荐一个大佬的讲解,真的很浅显易懂,建议先看了解大概PID:链接
ps:2022/1/2更新pid通俗理解:
out_speed = p*err+d*now_speed;//pid最核心算法
运动员参加100米跑步,假设这个人可以瞬间提速,但是无法瞬间减速到0
起点:0米
终点:100米
/*************************************************/
p=0.5,i=0,d=0
起跑时:
运动员在d=0,终点在100,此时100-d=100
out_speed =100×0.5=50,所以起跑时运动员速度最大,每秒50米
一秒后:
运动员到d=50米位置,此时距离终点err=100-d=50
out_speed =50×0.5=25
两秒后:
运动员跑到50+25=75米的位置,距离终点err=100-75=25
out_speed =25×0.5=12.5
…
可以预测,运动员越接近终点,速度越小,开始时候速度最大,快速到终点,相比全程匀速10米每秒的速度跑,可以比较一下的值pid算法在相应速度和效率上的优势
/*************************************************/
p=0.5,i=0,d=0.1
起跑时:
运动员在d=0,终点在100,此时100-d=100
out_speed =100×0.5+0=50
所以起跑时运动员速度最大,每秒50米
一秒后:
运动员到d=50米位置,此时距离终点err=100-d=50
out_speed =50×0.5+0.1×(-50)=20
两秒后:
运动员跑到d=50+20=70米的位置,距离终点err=100-d=30
out_speed =20×0.5+0.1×(-20)=10.5
…
/*************************************************/
可以推测,d的存在会让运动员刹车能力更强!也就是在牺牲速度的情况下,增加了稳定性,到了终点能马上刹住,不超出终点,就好比在运动员身后栓了根绳子,跑得越快,绳子往后拉的力气越大,辅助运动员刹车。
仔细观察可以发现一秒后和两秒后的now_speed分别为和(-50)和(-20),
(-50) = err-lasterr=50-100
(-20)= err -lasterr=30-50=-20
因此你会发现,now_speed也就是网上大多数文章讲pid时提到的微分,再通俗点说就是err-lasterr和now_speed成比例,可以等效替换,得到如下式子
out_speed = p*err+d*(err-lasterr);//pid最核心算法
注意:这里的系统输出的是速度,如果输出的是角度同样能控制,也一样都适用,变量名字换一下,pd重新调一下就好了,上面两个式子将会依次对照下面2个式子,可以结合着理解
out_Angle = p*err+d*now_Angle_speed;//now_Angle_speed是角速度,单位为rad/s
out_Angle = p*err+d*(err-lasterr);//pid最核心算法
一般pd控制的系统就足够百分之80的系统用了
什么是PID
快速(P)、准确(I)、稳定(D)
P:Proportion(比例),就是输入偏差乘以一个常数。
I :Integral(积分),就是对输入偏差进行积分运算。
D:Derivative(微分),对输入偏差进行微分运算。
(输入偏差=读出的被控制对象的值-设定值。比如说我要把温度控制在26度,但是现在我从温度传感器上读出温度为28度。则这个26度就是”设定值“,28度就是“读出的被控制对象的值”。)
1稳定性(P和I降低系统稳定性,D提高系统稳定性):在平衡状态下,系统受到某个干扰后,经过一段时间其被控量可以达到某一稳定状态;
2 准确性(P和I提高稳态精度,D无作用):系统处于稳态时,其稳态误差;
3快速性(P和D提高响应速度,I降低响应速度):系统对动态响应的要求。一般由过渡时间的长短来衡量。
各个参数对性能影响
1.随着比例系数Kp
.随着比例系数Kp的增加,超调量增大(震荡变严重),系统响应速度加快,
2.积分常数ki对控制性能的影响
积分控制部分的作用主要是用来消除静差。那么积分是怎样来消除静差的呢?
比例控制只能尽量将Err调节到0,
而微分的作用是将曲线的斜率控制到0则停止对其作用,
但斜率为0的时候Err并不一定为0。
这个时候我们就需要积分来起作用了。
我们知道曲线的积分相当于曲线与x轴围出来的面积。如下图,
积分作用的目的是使红色部分的面积和蓝色部分的面积的和为0,
那么即使系统在比例控制和微分控制部分已经趋于稳定,
只要Err不为0就会存在静差,只要存在静差那么积分就会对系统产生影响,
直到系统的Err值为0 。
那么这样我们的PID控制在理论上就可以达到一个非常精确的控制效果。

3.微分kd对控制性能的影响
作用机理:
 微分代表error变化斜率,下降时候其为负数;
微分代表error变化斜率,下降时候其为负数;
Err随时间是一条斜率小于0的曲线,那么在周期时间内,Err越大,微分的绝对值越大,那么也就对Err的减小速度是起到抑制的作用的,直到最后斜率为0微分才会停止作用。
PID作用
比例控制:能迅速反映误差,从而减小误差,但比例控制不能消除稳态误
差,KP的加大会引起系统的不稳定;
积分控制的作用是:只要系统存在误差,积分控制作用就不断地积累,
输出控制量以消除误差。因此只要有足够的时间,积分控制将能完全消
除误差,但是积分作用太强会使系统超调加大,甚至使系统出现振荡;
微分控制:可以减小超调量,克服振荡,使系统的稳定性提高,同时加快
系统的动态响应速度,减小调整时间,从而改善系统的动态性能。
位置型控制算法
位置闭环控制就是根据编码器的脉冲累加测量电机的位置信息,并与目标值进行比较,得到控制偏差,然后通过对偏差的比例、积分、微分进行控制,使偏差趋向于零的过程。
代码:
int Position_PID (int Encoder,int Target)
{
static float Bias,Pwm,Integral_bias,Last_Bias;
Bias=Encoder-Target; //计算偏差
Integral_bias+=Bias; //求出偏差的积分
Pwm=Position_KP*Bias+Position_KI*Integral_bias+Position_KD*(Bias-Last_Bias);
Last_Bias=Bias; //保存上一次偏差
return Pwm; //输出
}
增量型控制算法
速度闭环控制就是根据单位时间获取的脉冲数(这里使用了M法测速)测量电机的速度信息,并与目标值进行比较,得到控制偏差,然后通过对偏差的比例、积分、微分进行控制,使偏差趋向于零的过程。
Pwm+=Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)]
e(k):本次偏差
e(k-1):上一次的偏差
e(k-2):上上次的偏差
Pwm代表增量输出
在我们的速度控制闭环系统里面只使用PI控制,因此对PID控制器可简化为以下公式:
Pwm+=Kp[e(k)-e(k-1)]+Kie(k)
代码实现
int Incremental_PI (int Encoder,int Target)
{
static float Bias,Pwm,Last_bias;
Bias=Encoder-Target; //计算偏差
Pwm+=Velocity_KP*(Bias-Last_bias)+Velocity_KI*Bias; //增量式PI控制器
Last_bias=Bias; //保存上一次偏差
return Pwm; //增量输出
}
增量式控制算法的优点
(1) 增量算法不需要做累加,控制量增量的确定仅与最近几次误差采
样值有关,计算误差或计算精度问题,对控制量的计算影响较小。而位
置算法要用到过去的误差的累加值,容易产生大的累加误差。
(2)增量式算法得出的是控制量的增量,例如阀门控制中、只输出阀
门开度的变化部分,误动作影响小,必要时通过逻辑判断限制或禁止本
次输出,不会严重影响系统的工作。而位置算法的输出是控制量的全量
输出,误动作影响大。
(3) 采用增量算法,易于实现手动到自动的无冲击切换。
(4) 利用增量算法,也很容易得出位置算法u(k)= u(k-1)+△u(k)
如何调节pid三个参数(重点)
PID算法具有三大特性:
① 稳定性
② 快速性
③ 准确性
其实有时候并不一定都得用上
比如自动停车系统或者自动蓄水系统只需要用到1和3
刹车时用到123等等
接下来会举例说明
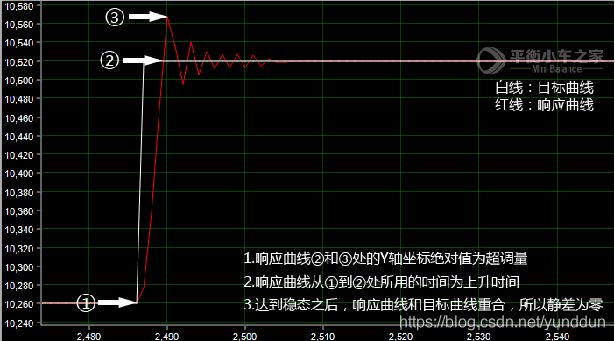
概念须知:
最大超调量:是响应曲线的最大峰值与稳态值的差,是评估系统稳定性的一个重要指标;
调节时间ts:是指响应曲线从原始工作状态出发,第一次到达输出稳态值所需的时间,是评估系统快速性的一个重要指标;
稳态误差ess:是被控量的稳定值与给定值之差,一般用于衡量系统的准确性,
 接下来我们需要调整KP,KI,KD的数值以达到最高效率
接下来我们需要调整KP,KI,KD的数值以达到最高效率
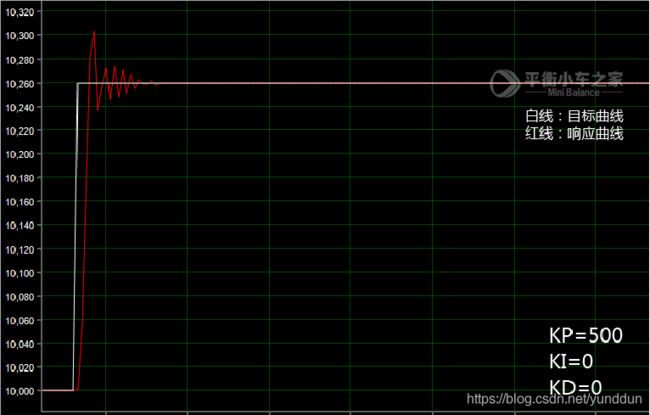
KP=500,KI=0,KD=0.响应曲线如图
 特点:
特点:
比例控制较大,出现了震荡
需要加入微分d控制抑制
积分控制为零,但是没有静差,因为比例控制较强
(注意:经测试比例系数过大之后可减少静差出现)
KP=50,KI=0,KD=0.响应曲线如图
 特点:
特点:
比例控制kp减小,无震荡,响应变慢了
无积分控制且比例控制较弱时,会出现静差(积分减少静差)
KP=500,KI=0,KD=400.响应曲线如图

特点:
1.在比例控制较强的情况下,加入比较大的微分控制,震动次数较小。
2.微分控制较大,响应变慢
KP=120,KI=0.1,KD=500.响应曲线如图
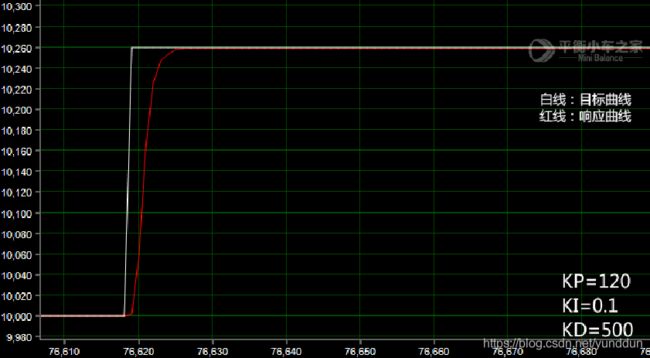
特点:
目标:控制电机转90°,需要严格控制超调量、和静差。但是对响应速度无要求。
1.因为响应速度无要求,一般比例控制应该给小一点。
2.加大系统的阻尼防止超调,也就是微分参数尽量大。
3.另外因为比例参数较小,应该加入积分控制减小静差。
ps:2022/1/2更新pid调参过程(个人经验):
网上很多调参口诀,可以借鉴,我这里简单根据自己的经验理一遍过程
float X_PI (int Target_X){
static int err=0,last_err = 0;
float out_put;
err=x_mid-Target_X; //计算偏差 物体在右边 640-700 = -
out_put=sjx_p/1000*err+sjx_d/1000*(err - last_err); //Pd控制器
last_err = err;
return out_put; //输出
}
pid算法总结成一句代码就是第五句代码,
注意,代码中/1000指的是吧kp扩大1000倍,因为这里kp太小了,放大好调一点
经过2年的项目积累总结pid调参步骤如下:
1.将p和i和d设置为全局变量,然后调试时候用debug会事半功倍
2.一般先把i和d设为0
3.慢慢调p,如果发现怎么调都调不好可以尝试p给个负值试试
4.首先,先给个很小的p值,然后给个稍微大一点的p值,例如1和200(根据情况而定),看看控制的对象有没有明显的效果,表现为p小的时候,力气很小可以用手轻易掰动他,p大的时候能感受到明显的阻力
5.如果第四部能感受到,那么第五步就是从小到大给p,你会发现控制对象力气越来越大,当到达一定的值时,会发现控制对象开始抖动,这个很正常,因为p太大,pid震荡幅度越来越大,超调了
6,记录产生震荡的p的值为p1,然后往回调,直到停止震荡,记录此时震荡的p值位p2
7.最后根据实际情况,p的值应该在80%p2到90%p2之间
8.p调稳定之后,开始加d,一般情况下在第7步时,i和d为0,假如控制对象是电机,空载情况下只要一个p就足够了,如果这个电机需要带动一定重量的物体旋转,会发现只有p会发生如下情况:用力拨动整个结构,会感受到电机给的力越来越大,继续拨动,直到电机旋转90度,这个时候力已经很大了,此时放开,让他从90度归位到原来位置,会发现他并不会马上停在0度,而是会跑到-10度左右然后弹回来,一直震荡,慢慢靠近0
9.如果出现8的情况,这时候慢慢加d,先检验d有没有作用,和4的p一样,先给个小的d再给个稍微大的d,d太大会震荡,一般1和20差不多,如果发现用8的方法拨动机械,发现机械不会到-10,到-5就往回弹了(大概一个数字,可能直接就到0度也可能),说明d有效果
10.发现9有效果的话,和p一样,慢慢调大,重复8的步骤一直去拨动电机,看他反弹的情况,如果发现d太大已经导致电机抖动了了,就不要再加大了,看看这个效果你满不满意,用在这个项目够不够用,一般到这里是够了
11.如果10的效果还不满意,用户需要的是迅速从90度反应到0度,那么可以考虑适当减少p,p减少了,d可以稍微往上抬,就不会像10那样电机抖动了
12:一般只有少数类似飞控那一类的控制才需要用到积分i,笔者还未用到i的控制,一直以来基本pd控制就可以很稳定
ps:2023/3/27更新:
做了如下优化:
优化前:
out_put=sjx_p/1000*err+sjx_d/1000*(err - last_err); //Pd控制器
优化后:
out_put=sjx_p/1000*err+sjx_d1/1000*(speed); //Pd控制器
说明:
位置差进行微分其实就是速度值,其中,速度值由电机foc算法反馈得到。
参考1
参考2
PID讲四轴飞行器
PID控制电机