吴恩达机器学习2022-Jupyter
1 可选实验室: 多变量线性回归
在这个实验室中,您将扩展数据结构和以前开发的例程,以支持多个特性。一些程序被更新使得实验室看起来很长,但是它对以前的程序做了一些小的调整使得它可以很快的回顾。
2 目标
扩展我们的回归模型例程以支持多个特性
- 扩展数据结构以支持多个特性
- 重写预测,成本和梯度例程,以支持多个功能
- 利用 NumPy np.dot 向量化它们的实现,以提高速度和简单性
在这个实验室里,我们将利用:
- NumPy,一个流行的科学计算图书馆
- Matplotlib,一个用于绘制数据的流行库
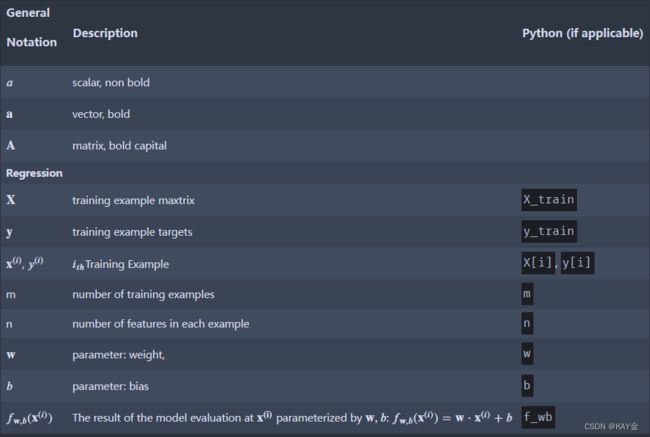
以下是将遇到的一些符号的摘要:
3 问题陈述
您将使用房价预测的激励例子。培训数据集包含三个示例,四个特征(大小、卧室、楼层和年龄)如下表所示。请注意,与早期的实验室不同,大小是平方英尺而不是1000平方英尺。这会导致一个问题,你将在下一个实验室解决!

你将使用这些值建立一个线性回归模型,这样你就可以预测其他房子的价格。例如,一个房子有1200平方英尺,3个卧室,1层,40年。
3.1 矩阵X
先来创建X_ train 和 y _ train 变量。
import copy, math
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('./deeplearning.mplstyle')
np.set_printoptions(precision=2) # reduced display precision on numpy arrays
X_train = np.array([[2104, 5, 1, 45], [1416, 3, 2, 40], [852, 2, 1, 35]])
y_train = np.array([460, 232, 178])
# data is stored in numpy array/matrix
print(f"X Shape: {X_train.shape}, X Type:{type(X_train)})")
print(X_train)
print(f"y Shape: {y_train.shape}, y Type:{type(y_train)})")
print(y_train)与上表类似,示例存储在 NumPy 矩阵 X _ train 中。矩阵的每一行代表一个示例。当你有 m 个训练例子(在我们的例子中,m 是3个) ,并且有 n 个特征(在我们的例子中是4个) ,X 是一个带维度的矩阵(m,n)(m 行,n 列)。
输出为:
X Shape: (3, 4), X Type:) [[2104 5 1 45] [1416 3 2 40] [ 852 2 1 35]] y Shape: (3,), y Type: ) [460 232 178]
3.2 参数向量w,b
w是一个有 n 个元素的向量。每个元素包含与一个特性相关联的参数。在我们的数据集中,n 是4。理论上,我们把它画成一个列向量。
b是一个标量参数。
为了演示,w 和 b 将加载一些接近最优的初始选择值。
b_init = 785.1811367994083
w_init = np.array([ 0.39133535, 18.75376741, -53.36032453, -26.42131618])
print(f"w_init shape: {w_init.shape}, b_init type: {type(b_init)}")输出:
w_init shape: (4,), b_init type:
4 多变量模型预测
该模型的多变量预测由线性模型给出:,()=00+11+...+−1−1+(1)。用向量表示为:,()=⋅+(2)。
我们先前的预测将一个特征值乘以一个参数,并添加了一个偏差参数。
我们以前的预测实现的一个直接扩展到多个特征将是实现(1)使用循环每个元素,执行乘法与其参数,然后加入偏差参数在结束。
def predict_single_loop(x, w, b):
"""
single predict using linear regression
Args:
x (ndarray): Shape (n,) example with multiple features
w (ndarray): Shape (n,) model parameters
b (scalar): model parameter
Returns:
p (scalar): prediction
"""
n = x.shape[0]
p = 0
for i in range(n):
p_i = x[i] * w[i]
p = p + p_i
p = p + b
return p
# get a row from our training data
x_vec = X_train[0,:]
print(f"x_vec shape {x_vec.shape}, x_vec value: {x_vec}")
# make a prediction
f_wb = predict_single_loop(x_vec, w_init, b_init)
print(f"f_wb shape {f_wb.shape}, prediction: {f_wb}")输出:
x_vec shape (4,), x_vec value: [2104 5 1 45] f_wb shape (), prediction: 459.9999976194083
注意 x _ vec 的形状。它是一个包含4个元素(4,)的一维NumPy 向量。结果f _ wb 是一个标量。
注意到上面的等式(1)可以用上面的点乘来实现。我们可以利用向量运算来加速预测。回想一下 Python/NumPy 实验室,NumPy np.dot ()[ link ]可以用来执行向量点积。
def predict(x, w, b):
"""
single predict using linear regression
Args:
x (ndarray): Shape (n,) example with multiple features
w (ndarray): Shape (n,) model parameters
b (scalar): model parameter
Returns:
p (scalar): prediction
"""
p = np.dot(x, w) + b
return p
# get a row from our training data
x_vec = X_train[0,:]
print(f"x_vec shape {x_vec.shape}, x_vec value: {x_vec}")
# make a prediction
f_wb = predict(x_vec,w_init, b_init)
print(f"f_wb shape {f_wb.shape}, prediction: {f_wb}")输出:
x_vec shape (4,), x_vec value: [2104 5 1 45] f_wb shape (), prediction: 459.9999976194082
结果和形状与之前使用循环的版本相同。接下来,np.dot 将用于这些操作。这个预测现在是一个单一的语句。大多数例程将直接实现它,而不是调用单独的预测例程。
5 多变量计算成本
多变量 J (w,b)的成本函数方程是:

其中,

与以前的实验室不同,w 和 x (i)是向量,而不是支持多个特性的标量。下面是公式(3)和(4)的实现。注意,本课程使用了一个标准模式,其中在所有 m 示例上使用了一个 for 循环。
def compute_cost(X, y, w, b):
"""
compute cost
Args:
X (ndarray (m,n)): Data, m examples with n features
y (ndarray (m,)) : target values
w (ndarray (n,)) : model parameters
b (scalar) : model parameter
Returns:
cost (scalar): cost
"""
m = X.shape[0]
cost = 0.0
for i in range(m):
f_wb_i = np.dot(X[i], w) + b #(n,)(n,) = scalar (see np.dot)
cost = cost + (f_wb_i - y[i])**2 #scalar
cost = cost / (2 * m) #scalar
return cost
# Compute and display cost using our pre-chosen optimal parameters.
cost = compute_cost(X_train, y_train, w_init, b_init)
print(f'Cost at optimal w : {cost}')输出:
Cost at optimal w : 1.5578904330213735e-12
6 多变量梯度下降法
多变量梯度下降法:

其中,n 是特性的数量,参数 wj,b,同时更新,
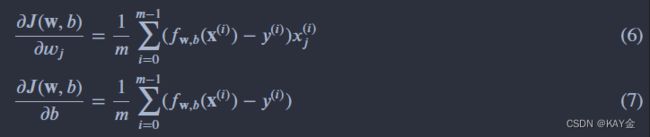
m 是数据集中训练例子的数量。fw,b (x (i))是模型的预测值,而 y (i)是目标值。
下面是计算公式(6)和(7)的实现。有很多方法可以实现这一点。
def compute_gradient(X, y, w, b):
"""
Computes the gradient for linear regression
Args:
X (ndarray (m,n)): Data, m examples with n features
y (ndarray (m,)) : target values
w (ndarray (n,)) : model parameters
b (scalar) : model parameter
Returns:
dj_dw (ndarray (n,)): The gradient of the cost w.r.t. the parameters w.
dj_db (scalar): The gradient of the cost w.r.t. the parameter b.
"""
m,n = X.shape #(number of examples, number of features)
dj_dw = np.zeros((n,))
dj_db = 0.
for i in range(m):
err = (np.dot(X[i], w) + b) - y[i]
for j in range(n):
dj_dw[j] = dj_dw[j] + err * X[i, j]
dj_db = dj_db + err
dj_dw = dj_dw / m
dj_db = dj_db / m
return dj_db, dj_dw
#Compute and display gradient
tmp_dj_db, tmp_dj_dw = compute_gradient(X_train, y_train, w_init, b_init)
print(f'dj_db at initial w,b: {tmp_dj_db}')
print(f'dj_dw at initial w,b: \n {tmp_dj_dw}')
输出:
dj_db at initial w,b: -1.6739251122999121e-06 dj_dw at initial w,b: [-2.73e-03 -6.27e-06 -2.22e-06 -6.92e-05]
def gradient_descent(X, y, w_in, b_in, cost_function, gradient_function, alpha, num_iters):
"""
Performs batch gradient descent to learn theta. Updates theta by taking
num_iters gradient steps with learning rate alpha
Args:
X (ndarray (m,n)) : Data, m examples with n features
y (ndarray (m,)) : target values
w_in (ndarray (n,)) : initial model parameters
b_in (scalar) : initial model parameter
cost_function : function to compute cost
gradient_function : function to compute the gradient
alpha (float) : Learning rate
num_iters (int) : number of iterations to run gradient descent
Returns:
w (ndarray (n,)) : Updated values of parameters
b (scalar) : Updated value of parameter
"""
# An array to store cost J and w's at each iteration primarily for graphing later
J_history = []
w = copy.deepcopy(w_in) #avoid modifying global w within function
b = b_in
for i in range(num_iters):
# Calculate the gradient and update the parameters
dj_db,dj_dw = gradient_function(X, y, w, b) ##None
# Update Parameters using w, b, alpha and gradient
w = w - alpha * dj_dw ##None
b = b - alpha * dj_db ##None
# Save cost J at each iteration
if i<100000: # prevent resource exhaustion
J_history.append( cost_function(X, y, w, b))
# Print cost every at intervals 10 times or as many iterations if < 10
if i% math.ceil(num_iters / 10) == 0:
print(f"Iteration {i:4d}: Cost {J_history[-1]:8.2f} ")
return w, b, J_history #return final w,b and J history for graphing
# initialize parameters
initial_w = np.zeros_like(w_init)
initial_b = 0.
# some gradient descent settings
iterations = 1000
alpha = 5.0e-7
# run gradient descent
w_final, b_final, J_hist = gradient_descent(X_train, y_train, initial_w, initial_b,
compute_cost, compute_gradient,
alpha, iterations)
print(f"b,w found by gradient descent: {b_final:0.2f},{w_final} ")
m,_ = X_train.shape
for i in range(m):
print(f"prediction: {np.dot(X_train[i], w_final) + b_final:0.2f}, target value: {y_train[i]}")Iteration 0: Cost 2529.46 Iteration 100: Cost 695.99 Iteration 200: Cost 694.92 Iteration 300: Cost 693.86 Iteration 400: Cost 692.81 Iteration 500: Cost 691.77 Iteration 600: Cost 690.73 Iteration 700: Cost 689.71 Iteration 800: Cost 688.70 Iteration 900: Cost 687.69 b,w found by gradient descent: -0.00,[ 0.2 0. -0.01 -0.07] prediction: 426.19, target value: 460 prediction: 286.17, target value: 232 prediction: 171.47, target value: 178
# plot cost versus iteration
fig, (ax1, ax2) = plt.subplots(1, 2, constrained_layout=True, figsize=(12, 4))
ax1.plot(J_hist)
ax2.plot(100 + np.arange(len(J_hist[100:])), J_hist[100:])
ax1.set_title("Cost vs. iteration"); ax2.set_title("Cost vs. iteration (tail)")
ax1.set_ylabel('Cost') ; ax2.set_ylabel('Cost')
ax1.set_xlabel('iteration step') ; ax2.set_xlabel('iteration step')
plt.show()输出:

这些结果一点都不鼓舞人心!成本仍在下降,我们的预测不是很准确。下一个实验室将探讨如何改进这一点。