卡尔曼滤波(三)(最优化递归数字处理算法)
卡尔曼增益的推导
(0)视频推荐和前言
【卡尔曼滤波器】3_卡尔曼增益超详细数学推导 ~全网最完整_哔哩哔哩_bilibili
协方差矩阵都是对称矩阵,求逆也是对称矩阵,并且它很可能是对角阵,也就是除了对角线以外其
他元素都是0,因为不同的状态变量收到的干扰之间一般不会有所联系,所以它们的协方差为0;噪
声和误差符合正态分布,并且可以用它们的协方差矩阵来近似的量化它们,它们的协方差矩阵又比
较特殊,用P表示它们的协方差,用X代表噪声或者误差本身,则P = E【X * X的转置】
下面会涉及到以下的协方差矩阵:
过程噪音W的协方差矩阵Q
测量噪音V的协方差矩阵R
先验误差E(k)的协方差矩阵P【E(k)】
后验误差E_New(k)的协方差矩阵P_New【E_New(k)】
(1)引入不确定性的状态空间方程表达
引入过程噪音,计算得到的状态变量:X(k)= A2 * X(k-1)+ B2 * U(k)+ W(k-1)
引入测量噪音后,测量得到的状态变量:Z(k)= H * X(k)+ V(k)
我们的目的:去补偿缺失的W(k-1),去削弱测量得到的状态变量包含的 V(k)
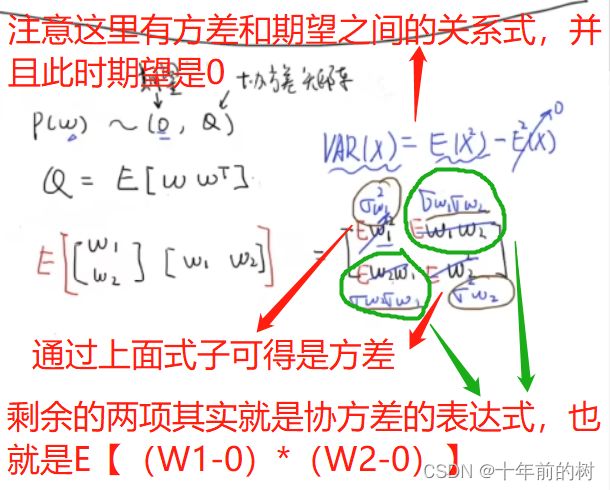
过程噪音和测量噪音无法通过建模得到,但是它们符合正态分布,也就是P(W)~(0,Q)、P
(V)~(0,R),其中Q和R矩阵是协方差矩阵,并且Q = E【 W * W的转置 】、R = E【 V * V的
转置 】,此时的协方差矩阵的公式,推导如下:
(2)不包含不确定性的状态空间方程表达
由于不确定性(这里说的是噪声所产生的那部分影响)是无法得到的,所以状态空间方程先去掉不
确定性,这个时候测量得到的不包含不确定性的值反而是我们想要的,结果如下:
计算得到的状态变量:X(k)= A2 * X(k-1)+ B2 * U(k)
测量得到的状态变量:Z(k)= H * X(k)
由于去掉了不确定性,所以第一个式子和第二个式子得到的算是估计值,做一下符号改动:
X_Hat(k)= A2 * X_Hat_New(k-1)+ B2 * U(k),X_Hat是计算得到的这一时刻的估计值,称
作先验估计值。在这里涉及到了后验估计值,它算是每一次估计周期得到的最后的估计结果
X_Hat_Meas(k)= H矩阵的逆 * Z(k),X_Hat_Meas是测量得到的这一时刻的估计值,剔除了
测量噪声所带来的影响,其中H矩阵其实是单位对角阵
(3)卡尔曼滤波使用
应该注意:现实当中的传感器测量到的值,都是带有噪声产生的那部分影响,也包含传感器测量误
差带来的那部分影响
通过卡尔曼滤波和上面的两个估计值,使用数据融合去得到一个准确的值
后验估计值:X_Hat_New(k) = X_Hat(k) + G *【 X_Hat_Meas(k) - X_Hat(k)】,其中
G = K(k)* H,而上面这个表达式里面,X_Hat_Meas(k)里面有H矩阵的逆,可将G的表达式
和X_Hat_Meas(k)的表达式代入,得到数据融合后的一个表达式:
X_Hat_New(k) = X_Hat(k) + K(k)*【Z(k) - H * X_Hat(k)】
此时的目标,便是寻找K(k)使得X_Hat_New(k)接近实际值X(k),也就是使得误差最小。这
里的X(k)是引入了不确定性后的状态空间方程中的X(k),也就是补偿了由于模型不够准确而
缺失的那部分影响
引入先验误差E(k)= X(k)-X_Hat(k) 和 后验误差E_New(k)= X(k)- X_Hat_New(k),
其中 E(k)和 E_New(k)都符合正态分布,先讨论后验误差,即P【E_New(k)】~
(0,P_New),其中P_New是后验误差的协方差矩阵,P_New = E 【 E_New(k)* E_New(k)
的转置】,特殊的是:P_New矩阵的对角线其实是各个维度的状态变量的误差的方差,只要满足
P_New矩阵的迹(矩阵的迹=对角线相加,此时刚好是各个维度的状态变量的误差的方差之和)
最小,即可得出最优解
具体的推导过程这里不做详细解释,下面只描述一下推导过程,这里会涉及到矩阵转置的性质、期
望的性质、矩阵的迹、矩阵的求导。
这个时候就可以先去求解P_New矩阵的表达式(E_New(k)的表达式已知),然后去求这个
P_New矩阵的迹,迹显然是关于K(k)的一个表达式,然后这个表达式对K(k)求导并令它为0,
从而找到K(k)的最终表达式
卡尔曼增益系数:K(k) = ( H * P【E(k)】* H的转置 + R )的逆 * P【E(k)】* H的转置
H矩阵是观测矩阵,是在测量得到的状态变量的表达式中出现的
P【E(k)】是先验误差的协方差矩阵
R矩阵是测量噪音的协方差矩阵
如果测量噪音带来的影响很大,也就是R矩阵会很大地影响卡尔曼增益系数的计算,那么可以发现
此时卡尔曼增益系数接近于0,就会使得数据融合后的表达式所得到的后验估计值更多地接近于先
验估计值,也就是愿意去相信计算得到的结果;反之,测量噪音基本没有影响的时候,后验估计值
更多地接近于测量估计值,也就是愿意去相信测量得到的结果