android app控制ros机器人一
android开发app,进而通过控制ros机器人,记录开发过程
查阅资料:
rosjava使用较多,已经开发好的app也有开源的案例
rosjava · GitHub
https://github.com/ros-autom/RobotCA
https://github.com/ROS-Mobile/ROS-Mobile-Android
https://github.com/ros-android/android_app_manager
GitHub - ros-android/android_sensors_driver: ROS Driver for Android Sensors
国内:
ros app 下载、ros android app下载、ROS机器人控制app下载_rosapp_白茶-清欢的博客-CSDN博客
robotca没有找到手机可以用的稳定资源,安装了一个有闪退问题,源码打开后也各种问题,然后就改使用ros-mobile了
首先在ubuntu18下安装android studio,选择22.2.1版本
-
Download Android Studio from https://developer.android.com/studio/index.html#linux-bundle
-
安装JDK
sudo apt-get update
sudo apt-get install openjdk-8-jdk
-
按照git教程安装运行,打开项目,更换插件,选择下载的JDK,将 Android Studio 固定到任务栏
使用ROS-Mobile,可以直接下载.apk文件,在手机上安装或者源码下载
https://github.com/ROS-Mobile/ROS-Mobile-Android/tree/master
先打开手机app看看效果,同一wifi环境,ros端启动ros,app端输入ros端ip,ros端口然后可以连接
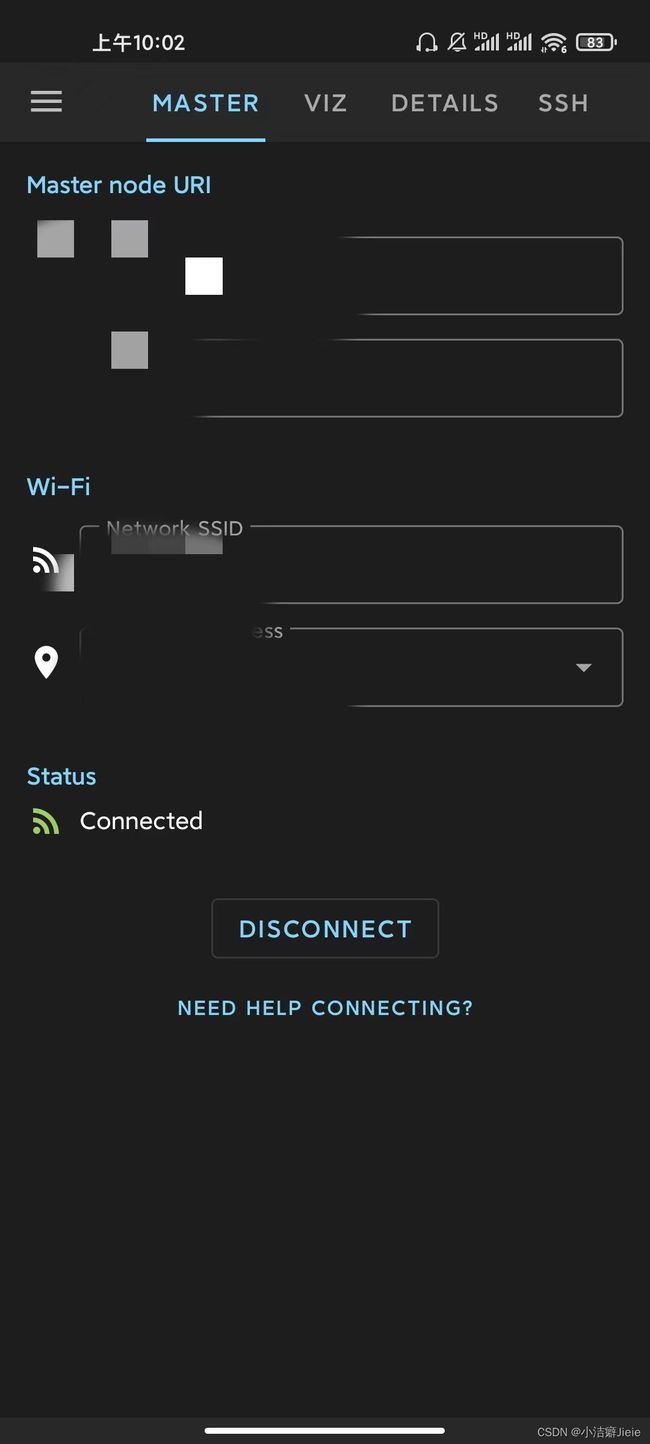
安装ssh服务,并查看状态,显示active(running)表示正在运行
sudo apt-get install openssh-server
sudo service ssh status
然后点击ssh标签进行连接。填写ip 用户名等信息,ssh下把信息填写了,但是没有连接成功。身边大佬给了一个思路,ssh连接前,要给机器人设置静态ip
查网关:
route -n
目标 网关 子网掩码 标志 跃点 引用 使用 接口
0.0.0.0 192.168.2.1 0.0.0.0 UG 600 0 0 wlp2s0
查动态ip:
ifconfig
wlp2s0: flags=4163
inet 192.168.2.115 netmask 255.255.255.0 broadcast 192.168.2.255
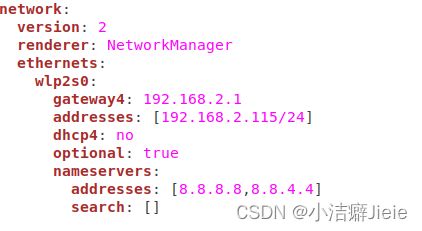
参考教程:【Linux】ubuntu18.04修改IP为静态IP并能够上网(傻瓜式教学)_ubuntu1804静态ip设置后怎么联网_DedicationYu的博客-CSDN博客
对应自己的接口、网关、ip修改,:后必须空格,缩进也要调整好,本人缩进两个空格。
bug:
Invalid YAML: tabs are not allowed for indent:
wlp2s0:
^
一般都是缩进和空格问题:
机器人端需要配置静态ip 和ssh连接,然后输入ip username就可以实现ssh连接了。
输入rostopic list的时候报错,显示command 'rostopic'not found
操作了一些东西,然后重新连接了一下,然后发现可以查看rostopic话题了,不确定哪个教程起作用了,有增加~/.bash_profile文件,把~/.bashrc文件的内容直接复制过去了。
SSH远程执行脚本报错command not found和环境变量问题_ssh 远程执行pm2_nklinsirui的博客-CSDN博客
然后可以添加ros节点,并设置显示界面大小。下面教程有快速上手的视频
[ROS-Mobile] 快手上手教程_哔哩哔哩_bilibili
git的wiki教程中有介绍如何添加自己的节点。(后续可以使用)
当前尝试连接自己的电脑(ubuntu系统环境下),尝试启动笔记本相机驱动,看看是否加载出画面。有录制好的bag包,可以播放bag包,进行测试。
播放数据包,或者启动笔记本相机时,通过ssh都可以订阅到话题消息,但是VIZ界面不显示画面。
下载项目,使用Android Studio打开,报错:
FAILURE: Build failed with an exception.
* Where:
Build file 'D:\AndroidCode\Robot\ROS-Mobile-Android-master\build.gradle' line: 6
* What went wrong:
A problem occurred evaluating root project 'RosAndroid'.
> Could not get resource 'https://github.com/rosjava/rosjava_bootstrap/raw/kinetic/buildscript.gradle'.
> Could not GET 'https://raw.githubusercontent.com/rosjava/rosjava_bootstrap/kinetic/buildscript.gradle'.
> raw.githubusercontent.com
让gpt帮忙差错,指出问题可能在网络代理这块,搜索了一下应该如何配置
Android Studio 配置 Http Proxy_android studio proxy_第89号的博客-CSDN博客
配置网络代理没有解决问题,新思路,下载脚本文件,保存到项目然后直接引用。然后rebuild工程。