51单片机学习--按键控制流水灯模式&定时器时钟
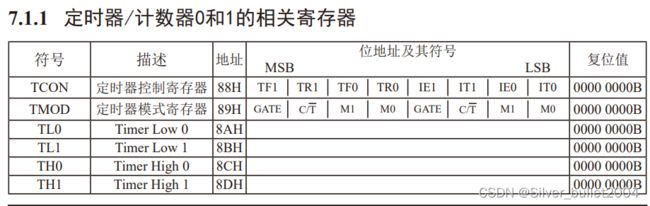
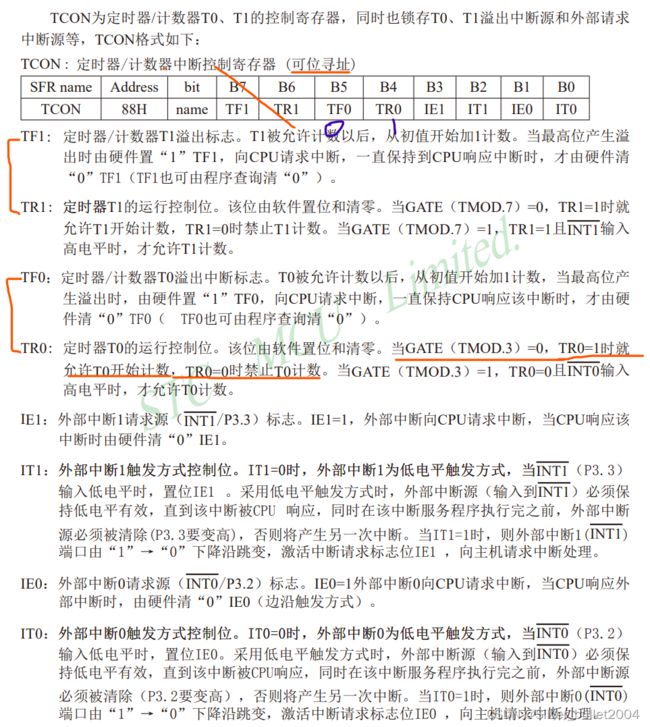
TMOD负责确定T0和T1的工作模式,TCON控制T0和T1的启动或停止计数,同时包含定时器状态
TF1:定时器1溢出标志
TF0:定时器0溢出标志
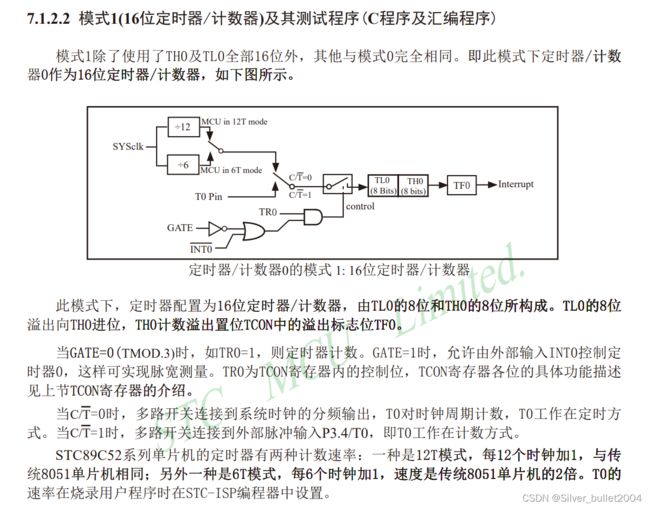
0~65535 每隔1微秒计数器+1,总时间65535微秒,赋上初值64535,则只有1000微秒即1毫秒
第一步:编写Timer_Init()
首先配置TMOD
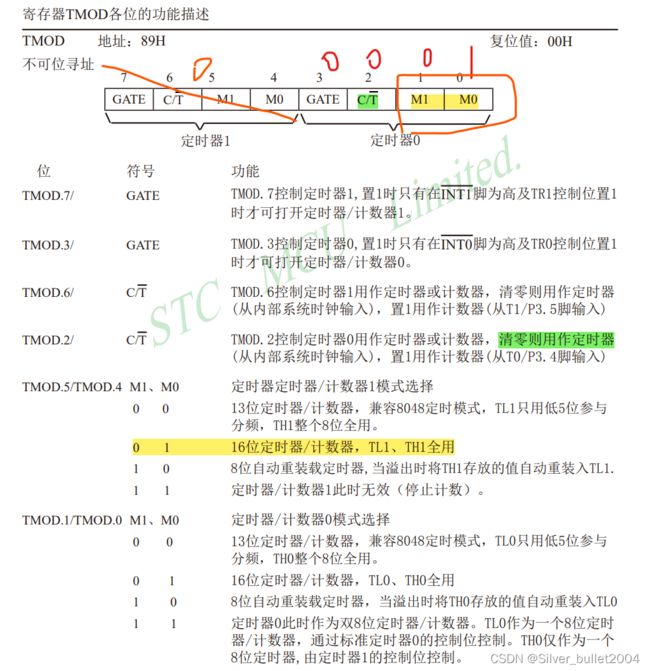
所以初始化TMOD = 0x01; //0000 0001
整体操作:TMOD = TMOD & 0xF0; //低四位清零,高四位不变
TMOD = TMOD | 0x01; //最低位置1,其他位不变
接下来配置TCON
TF0 = 0;
TR0 = 1;
还要配置TH0和TL0
用64535,存在这两个盒子里,盒子最大只能存八字节也就是256,所以
TH0 = 64535 / 256;
TL0 = 64535 % 256;
最后配置中断系统
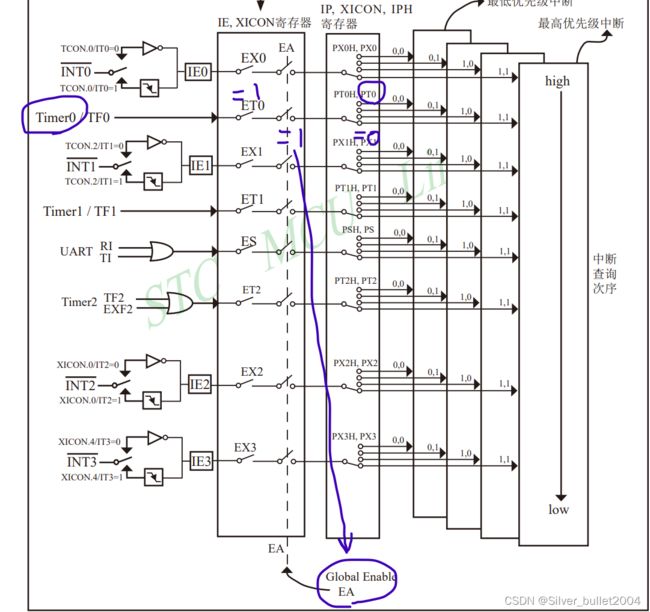
要打开的开关置1
ET0 = 1;
EA = 1;
PT0 = 0;
来看看代码
#include 接下来把定时器模块化
创建Timer0头文件和.c文件存放Timer0_Init()
中断函数保留在主函数中,根据不同的需要进行修改
然后把T0Count 改为静态局部变量,使之生命周期与文件相同,否则执行完一次之后会被初始化
利用按键控制流水灯流动方向的主函数代码:
Key函数读取按键,按一次改变一次流水方向,每500毫秒中断一次,判断流水模式进行移位
crol 是循环左移函数 , _cror_是循环右移函数,需要INTRINS.H头文件
#include 而定时器时钟只需要在此基础上进行修改,利用之前模块化好的LCD1602模块和Timer0模块,下面给出主函数:
#include