基于STM32的直流电机串级角度控制
基于STM32的直流电机串级角度控制
单片机课程设计
文章目录
- 基于STM32的直流电机串级角度控制
-
- 前期准备
-
- 材料准备
- 软件准备
- 技术准备
- 理论准备
- 设计过程
-
- 硬件连接
- MCU资源配置
- 软件设计
- 主要代码
-
- 任务构建
- PID算法
- 串口通讯
- 实际效果
- 分析与改进
-
- 性能改善
- 随动测试
- 其他说明
前期准备
材料准备
-
控制板
使用先前购买的STM32F407工控板
CPU频率可达168MHZ,硬件资源丰富
这里需要使用的硬件资源:
串口UART1、系统定时器SysTick(RTOS)、通用定时器TIM14(输出PWM)、模数转换器ADC1(检测电流与角度)、通用定时器TIM2、TIM5(M测速)、独立看门狗IWDG

-
电源板
使用MP1584EN可调电源降压模块,用于给电池降压给控制板提供5V电源(灵活选择)
这里输入电池电压7.4V,输出调至5V,最大输出电流3A

-
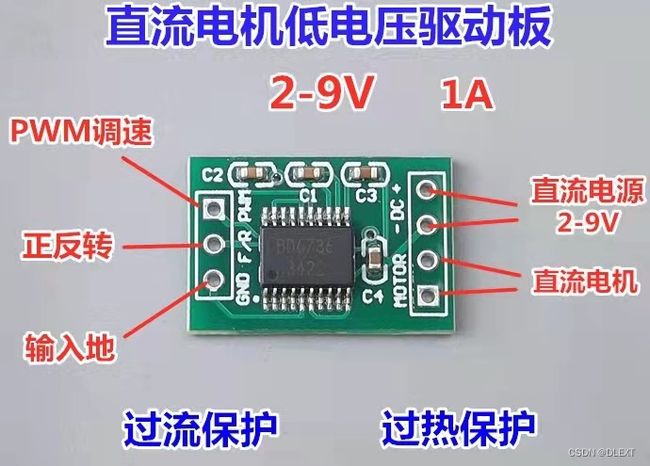
电机驱动板BD6736
其核心电路是桥式可逆PWM变换器,使用PWM信号驱动,支持电机正反转
输入电压支持2-9V,可输出1A电流

-
电机
使用碳刷385直流电机
适合电压5-12V,空载电流100ma
7.4V电压堵转电流约800ma
带AB相编码盘,可进行测速

-
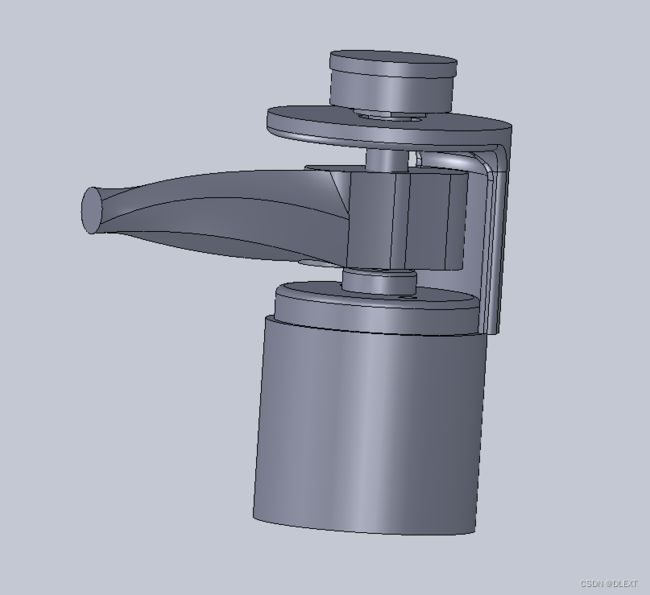
打印件准备
使用
solidworks进行建模并打印相关固定件

-
其他
- 电源 这里使用7.4V航模电池
- ST-Link 控制板烧录程序
- USB-TTL 串口通讯 (这里使用蓝牙串口)
- 检流电阻 用于检测电机电流(这里使用0.5R 2W 1%)
- 运算放大器 用于放大电流信号[7.8倍] (这里使用358 电阻68K 10K)
- 实验板、杜邦线等

软件准备
-
keil5
用于编写代码程序
需要下载STM32芯片包
需要修改宏定义,添加头文件地址等


-
串口猎人
用来进行串口调试

技术准备
-
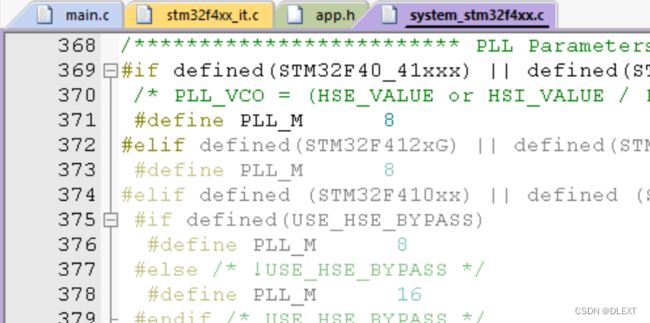
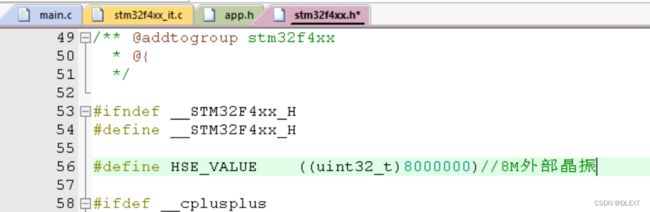
官方库的移植
移植细节参考网上资料,不再赘述
需要注意依据板子修改部分代码:依据晶振大小修改时钟宏定义(这里是8MHZ)

-
FreeRTOS移植
移植过程参考网上资料,这里使用V9.0.0版本
注意在中断文件中注释相关中断函数,供FreeRTOS使用
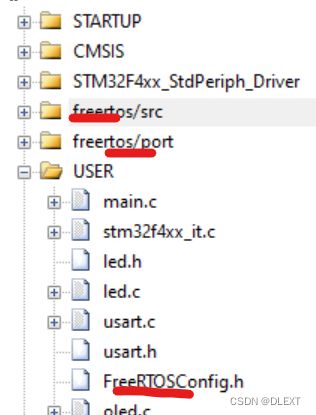
在FreeRTOSConfig.h中修改宏定义
添加宏定义、配置系统时钟、修改内存相关配置等
- 添加编译器相关宏
//针对不同编译器调用不同的stdint.h文件
#if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__)
#include -
修改系统时钟
#define configCPU_CLOCK_HZ ( SystemCoreClock ) #define configTICK_RATE_HZ ( ( TickType_t ) 10000 ) //RTOS系统节拍中断的频率(一秒中断的次数)每次中断RTOS都会进行任务调度 -
开启动态内存
#define configSUPPORT_DYNAMIC_ALLOCATION 1 //支持动态内存申请 -
关闭钩子函数(这里没有使用他们)
#define configUSE_IDLE_HOOK 0 #define configUSE_TICK_HOOK 0 //xTaskIncrementTick函数是在xPortSysTickHandler中断函数中被调用的。因此,vApplicationTickHook()函数执行的时间必须很短才行 #define configUSE_MALLOC_FAILED_HOOK 0 //使用内存申请失败钩子函数 #define configCHECK_FOR_STACK_OVERFLOW 0 -
STM32F4外设学习
GPIO口控制
定时器使用(定时、正交编码、PWM输出)
ADC使用
中断
串口通讯
看门狗
具体内容请参考网上资料
理论准备
-
PID控制
PID是基于反馈控制的常用算法,适用于大部分控制场合
P比例:比例项可以成比例地反映控制系统的偏差信号,一旦产生偏差就立即产生控制作用以减小偏差。比例系数越大控制作用越强,但易产生超调与振荡,属于有差调节。
I积分:积分项可以累计误差作为输出,属于无差调节,只有误差为零时才会维持输出不变,一般与P合用构成最常用的控制器,但应注意积分饱和问题。
D微分:微分项能反映偏差信号的变化趋势,能在偏差信号的值变得太大之前在系统中引入一个早期修正信号,减小系统调节时间,一般作为PI控制器的修正,但因注意高频噪声干扰。
-
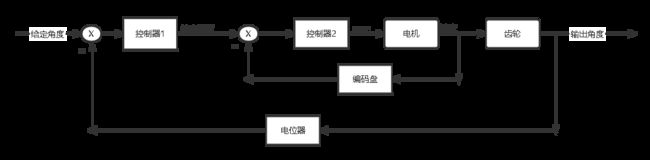
串级控制
在普通反馈控制结构中引入一个内环控制
可以提高系统抗扰能力、改善动态性能、提高鲁棒性
内环起到粗调和快速抵抗干扰的作用,可以改善系统的动态性能增大主控制器增益,提高系统频率,一般只使用比例控制。
外环起到细调的作用,主控制器输出作为内环的给定。
-
电机拖动
主要涉及直流电机调速
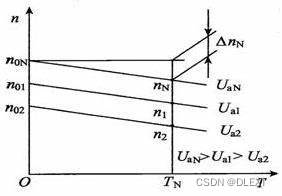
这里使用永磁式直流电机,使用调压调速
根据直流电机稳态公式$n=\frac{U-IR}{K_{e}\Phi} 得 出 , 当 磁 通 得出,当磁通 得出,当磁通\Phi 、 电 阻 、电阻 、电阻R$不变时调节电枢回路电压可以改变转子转速
在电流过大时引入电流负反馈,可以增加系统稳定性,减少电机堵转带来的大电流

-
同相放大器
使用同相放大器将电流采样电阻电压进行放大,方便单片机进行读取
放大倍数为7.8倍
放大倍数为 1 + R 1 R 2 1+\frac{R_1}{R_2} 1+R2R1倍

-
M法测速
基于电机AB相编码盘,使用定时器计数功能进行边沿计数,进而测得速度
使用通用定时器TIM2进行计数,通用定时器TIM5发射采样脉冲,可以测得采样周期内电机速度
-
任务系统
基于FreeRTOS实时操作系统进行任务调度和CPU等资源管理,提高系统实时性和利用率

设计过程
硬件连接

MCU资源配置
-
GPIO口分配
GPIOA挂载载AHB1时钟总线上,使用时需要打开AHB1时钟总线
GPIOX_Pin_X 用途 GPIOA_Pin_6 LED指示灯 GPIOA_Pin_9 串口通讯TX GPIOA_Pin_10 串口通讯RX GPIOA_Pin_0 正交编码A相 GPIOA_Pin_1 正交编码B相 GPIOA_Pin_5 电机正反转控制 GPIOA_Pin_7 电机PWM输出 GPIOA_Pin_2 AD转换读取角度 GPIOA_Pin_4 AD转换读取电流 -
定时器分配
-
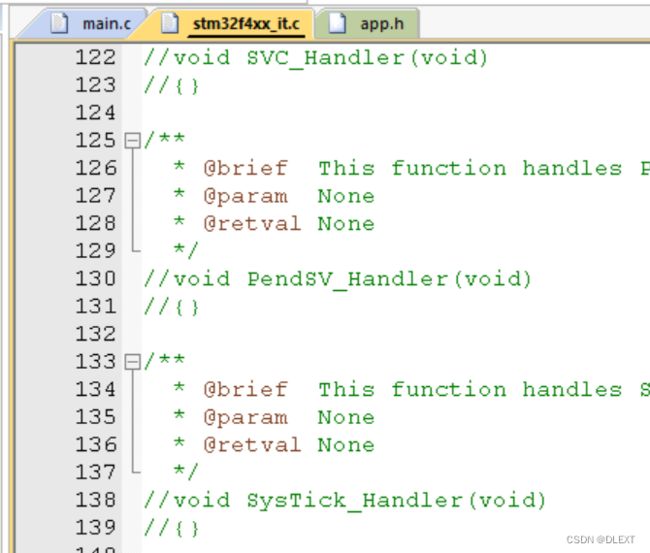
系统定时器SysTick
提供系统节拍给FreeRTOS,在使用FreeRTOS时自动启动
下图为FreeRTOS中提供的中断函数,用户不需要配置
-

-
通用定时器TIM2
使用TIM2计数模式记录电机编码盘脉冲,硬件内部具备AB相检测功能
配置函数如下:
void Encoder_Init_TIM2(void) { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; GPIO_InitTypeDef GPIO_InitStructure; //打开定时器TIM2与GPIOA的时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); GPIO_PinAFConfig(GPIOA,GPIO_PinSource0,GPIO_AF_TIM2); //输入引脚的复用功能 GPIO_PinAFConfig(GPIOA,GPIO_PinSource1,GPIO_AF_TIM2); //引脚配置 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用 GPIO_InitStructure.GPIO_Speed = GPIO_High_Speed; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; GPIO_Init(GPIOA, &GPIO_InitStructure); TIM_TimeBaseStructInit(&TIM_TimeBaseStructure); TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // 预分频器 TIM_TimeBaseStructure.TIM_Period = ARR_ENCODE; //设定计数器自动重装值 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//选择时钟分频:不分频 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//TIM向上计数 TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); TIM_EncoderInterfaceConfig(TIM2, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使用编码器模式3 TIM_ICInitTypeDef TIM_ICInitStructure; TIM_ICStructInit(&TIM_ICInitStructure); TIM_ICInitStructure.TIM_ICFilter = 0x8; TIM_ICInit(TIM2, &TIM_ICInitStructure); TIM_SetCounter(TIM2,0); TIM_Cmd(TIM2, ENABLE); } -
通用定时器TIM5
发出计数脉冲,产生计数中断
定时器配置函数如下:
static void TIM_Mode_Config(void) { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; // 此处默认通用定时器时钟源TIMxCLK = HCLK/2=84MHz RCC_APB1PeriphClockCmd(GENERAL_TIM_CLK, ENABLE);//打开定时器时钟源 TIM_TimeBaseStructure.TIM_Prescaler = 8400-1; //配置预分频系数,定时器频率TIMxCLK/(TIM_Prescaler+1)=10000Hz TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;// 向上计数方式 TIM_TimeBaseStructure.TIM_Period = 20-1; //配置自动装载值,累计 TIM_Period个后产生一个更新或者中断 TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;// 输入捕获 TIM_TimeBaseInit(GENERAL_TIM, &TIM_TimeBaseStructure);//初始化定时器 TIM_ClearFlag(GENERAL_TIM, TIM_FLAG_Update);// 清除定时器更新中断标志位 TIM_ITConfig(GENERAL_TIM,TIM_IT_Update,ENABLE);// 开启定时器更新中断 TIM_Cmd(GENERAL_TIM, ENABLE); // 使能定时器 }中断配置时应注意中断组不因设置,因FreeRTOS统一调度问题,中断组已提前设置好,详见
main.c文件中BSP_Init(void)函数中断配置函数如下:
static void TIMx_NVIC_Configuration(void) { NVIC_InitTypeDef NVIC_InitStructure; //NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);// 设置中断组为0 NVIC_InitStructure.NVIC_IRQChannel = GENERAL_TIM_IRQn; // 设置中断来源 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; // 设置抢占优先级 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;// 设置子优先级 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); }中断调用函数见
stm32f4xx_it.c文件中,注意判断中断类型和标志位清除中断代码如下:
void GENERAL_TIM_IRQHandler (void) { uint32_t ulReturn; ulReturn = taskENTER_CRITICAL_FROM_ISR();//进入临界段,临界段可嵌套 if ( TIM_GetITStatus( GENERAL_TIM, TIM_IT_Update) != RESET ) //判断中断类型 { TIM_ClearITPendingBit(GENERAL_TIM , TIM_IT_Update); //清除中断标志 Read_Encoder();//读取电机速度 } taskEXIT_CRITICAL_FROM_ISR(ulReturn); } -
通用定时器TIM14
使用TIM14输出PWM信号控制电机电压,使用Channel1
配置函数如下:
static void TIM14_PWM_Init() { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14,ENABLE); TIM_TimeBaseStructure.TIM_Prescaler=PSC_PWM; //定时器分频 TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式 TIM_TimeBaseStructure.TIM_Period=ARR_PWM; //自动重装载值 TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeBaseInit(TIM14,&TIM_TimeBaseStructure);//初始化定时器14 //初始化TIM14 Channel1 PWM模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高 TIM_OC1Init(TIM14, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 4OC1 TIM_OC1PreloadConfig(TIM14, TIM_OCPreload_Enable); //使能TIM14在CCR1上的预装载寄存器 TIM_ARRPreloadConfig(TIM14,ENABLE);//ARPE使能 TIM_Cmd(TIM14, ENABLE); //使能TIM14 } -
AD转换器分配
-
ADC1
这里有两路模拟输入:电流、角度,均为电压值输入(小于3.3V)
使用ADC1,使用通道2(角度)、通道4(电流)
配置函数如下:
static void ADC_Mode_Config(void) { ADC_InitTypeDef ADC_InitStructure; ADC_CommonInitTypeDef ADC_CommonInitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);// 开启ADC时钟 ADC_DeInit(); //复位 ADC_CommonInitStructure.ADC_Mode = ADC_Mode_Independent;//独立模式 ADC_CommonInitStructure.ADC_TwoSamplingDelay = ADC_TwoSamplingDelay_5Cycles;//两个采样阶段之间的延迟5个时钟 ADC_CommonInitStructure.ADC_DMAAccessMode = ADC_DMAAccessMode_Disabled; //DMA失能 ADC_CommonInitStructure.ADC_Prescaler = ADC_Prescaler_Div4;//预分频4分频。ADCCLK=PCLK2/4=84/4=21Mhz,ADC时钟最好不要超过36Mhz ADC_CommonInit(&ADC_CommonInitStructure);//初始化 ADC_InitStructure.ADC_Resolution = ADC_Resolution_12b;//12位模式 ADC_InitStructure.ADC_ScanConvMode = DISABLE;//非扫描模式 ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;//关闭连续转换 ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None;//禁止触发检测,使用软件触发 //ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_T1_CC1;//外部触发通道(这里使用软件触发,随意) ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;//右对齐 ADC_InitStructure.ADC_NbrOfConversion = 1;//1个转换在规则序列中 也就是只转换规则序列1 ADC_Init(ADC1, &ADC_InitStructure);//ADC初始化 ADC_Cmd(ADC1, ENABLE);// 使能ADC }
-
-
串口USART1分配
GPIO口配置:
static void gpiousart() { RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); GPIO_InitTypeDef gpio_init; gpio_init.GPIO_Speed=GPIO_Fast_Speed; gpio_init.GPIO_PuPd=GPIO_PuPd_UP; gpio_init.GPIO_Mode=GPIO_Mode_AF;//复用模式 gpio_init.GPIO_OType=GPIO_OType_PP;//推挽输出 gpio_init.GPIO_Pin=GPIO_Pin_9;//TX GPIO_Init(GPIOA,&gpio_init); gpio_init.GPIO_Pin=GPIO_Pin_10;//RX GPIO_Init(GPIOA,&gpio_init); /* gpio复用 */ GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); }串口配置:
void usartinit() { gpiousart(); RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); USART_InitTypeDef USART_InitStructure; USART_InitStructure.USART_BaudRate = 115200;//波特率 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长8位 USART_InitStructure.USART_StopBits = USART_StopBits_1;//停止位1位 USART_InitStructure.USART_Parity = USART_Parity_No;//不校验 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//不用硬件流 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//usart模式RX+TX USART_Init(USART1, &USART_InitStructure); //初始化 #if EN_USART1_RX nvicinit();//中断配置 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//使能串口接收中断 #endif USART_Cmd(USART1, ENABLE);//使能串口 }中断配置:
static void nvicinit(void) { NVIC_InitTypeDef NVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//中断源 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); }
软件设计
-
数据结构
结构体system_msg定义在app.h文件中
结构体pid_msg定义在pid.h文件中
数据类型 变量名 用途 system_msg sys_msg 电机参数 system_flag sys_flag 系统状态信号 pid_msg pid_motspeed 电机速度环(内环) pid_msg pid_motang 电机角度环(外环) system_msg结构体:
struct system_msg { int16_t mot_pwm; //给定PWM int16_t mot_speed;//实际速度 float mot_ang; //实际角度 u16 mot_Ama; //实际电流 int16_t mot_tag_speed; //目标速度 float mot_tag_ang; //目标角度 u16 dead_A;//堵转电流 };pid_msg结构体:
struct pid_msg { float SetSpeed; //目标 float ActualSpeed; //实际 float output;//输出值 float Err; //误差值 float Err_last; //上次误差值 float Err_llast;//上上次误差 float output_last; //上次输出值 float Kp, Ki, Kd; }; -
宏定义
宏名称 值 用途 DEAD_PWM 1000 PWM输出限制 DEAD_SPEED 80 电机速度限制 DE_ANG_DOWN 0 角度下限 DE_ANG_UP 235 角度上限 -
串口通讯协议
帧头A5,帧尾AA,定义在usart.h中
功能位 用途 说明 0x01 接收 上位机给定角度 0x01 上传 输出PWM值 0x02 上传 电机电流 0x03 上传 电机实际速度 0x04 上传 电机给定速度 0x05 上传 电机实际角度 0x06 上传 电机给定角度
主要代码
任务构建
- 初始化与任务构建
-
int main(void);
首先进行板卡初始化,初始化硬件设施
然后新建AppTaskCreate任务,在此任务中创建其他任务
最后启动任务调度。
板卡初始化:
static void BSP_Init(void) { //中断优先级分组为4(4bit都用来表示抢占优先级,范围:0~15),不要再次分组!! NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 ); led_inint(); GPIO_OLED_InitConfig(); usartinit(); THE_ADC_Init(); PWM_Init(); TIMx_Configuration(); config_motor(); PID_Init(); IWDG_Config(IWDG_Prescaler_64 ,625);//看门狗1s printf("This is STM32F4 and FreeRTOS\r\n"); //OLED_Clear(); //OLED_ShowString(0,0,"This is RTOS"); } -
static void AppTaskCreate(void);
创建任务
SpeedPID_Task:速度环任务
AngPID_Task:角度环任务
Iwdg_Task:看门狗任务
Usarttx_Task:串口传输任务
首先进入临界区,不进行任务调度,防止任务切换
taskENTER_CRITICAL(); //进入临界区然后新建四个任务,分配资源和优先级
最后删除AppTaskCreate任务,退出临界区
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务 taskEXIT_CRITICAL(); //退出临界区
-
角度环任务
通过AD转换读取角度,进行PID运算得出给定速度
static void AngPID_Task(void* parameter) { TickType_t xLastWakeTime; sys_msg.mot_tag_ang=(int)DE_ANG_UP/2; while (1) { vTaskDelayUntil(&xLastWakeTime,50); sys_msg.mot_ang=((double) GetAng_ADC()/(double)4096*270)-30;//读取角度 sys_msg.mot_tag_speed=PID_Cal(&pid_motang,sys_msg.mot_tag_ang,sys_msg.mot_ang,DEAD_SPEED,(-DEAD_SPEED));//PID输出角度 } } -
速度环任务
根据电机速度与外环给定值进行PID运算得出输出PWM
static void SpeedPID_Task(void* parameter) { TickType_t xLastWakeTime; while (1) { vTaskDelayUntil(&xLastWakeTime,10); sys_msg.mot_Ama =(double)2000/7.8*((double) GetA_ADC()/(double)4096*3.3); // 读取电流MA sys_msg.mot_pwm=PID_Cal(&pid_motspeed,sys_msg.mot_tag_speed,sys_msg.mot_speed,DEAD_PWM,(-DEAD_PWM));//PID速度 set_pwm(sys_msg.mot_pwm); //修改占空比 } } -
看门狗任务
进行定时喂狗
static void Iwdg_Task(void* parameter) { while (1) { vTaskDelay(5000); GPIO_ToggleBits(GPIOA,GPIO_Pin_6);//指示灯 IWDG_Feed(); } } -
串口数据发送任务
上传数据给上位机,方便数据可视化
static void Usarttx_Task(void* parameter) { while (1) { vTaskDelay(80); Usart_Dataframe( 0x01, sys_msg.mot_pwm); Usart_Dataframe( 0x02, sys_msg.mot_A10ma); Usart_Dataframe( 0x03, sys_msg.mot_speed); Usart_Dataframe( 0x04, sys_msg.mot_tag_speed); Usart_Dataframe( 0x05, sys_msg.mot_ang); Usart_Dataframe( 0x06, sys_msg.mot_tag_ang); } }
PID算法
这里使用增量式PID算法,包含输出上下限控制
增量PID公式:
Δ u ( k ) = K p [ e ( k ) − e ( k − 1 ) ] + K i e ( k ) + K d [ e ( k ) − 2 e ( k − 1 ) + e ( k − 2 ) ] \Delta u(k)=K_p[e(k)-e(k-1)]+K_ie(k)+K_d[e(k)-2e(k-1)+e(k-2)] Δu(k)=Kp[e(k)−e(k−1)]+Kie(k)+Kd[e(k)−2e(k−1)+e(k−2)]
PID结构体如下:
struct pid_msg {
float SetSpeed; //目标
float ActualSpeed; //实际
float output;//输出值
float Err; //误差值
float Err_last; //上次误差值
float Err_llast;//上上次误差
float output_last; //上次输出值
float Kp, Ki, Kd;
};
PID参数:
void PID_Init()
{
pid_motspeed.Kp = 25;
pid_motspeed.Ki = 0;
pid_motspeed.Kd = 0;
pid_motang.Kp = 2;
pid_motang.Ki = 0.3;
pid_motang.Kd = 0.04;
}
PID控制函数:
int16_t PID_Cal(struct pid_msg * pid_mot,int16_t tag,int16_t act,int16_t deadup,int16_t deaddown)
{
pid_mot->ActualSpeed=act; //实际值
pid_mot->SetSpeed = tag; //目标值
pid_mot->Err = pid_mot->SetSpeed - pid_mot->ActualSpeed; //本次误差
pid_mot->output = pid_mot->output_last + \
pid_mot->Kp*(pid_mot->Err-pid_mot->Err_last) + \
pid_mot->Ki*pid_mot->Err + \
pid_mot->Kd*(pid_mot->Err - 2*pid_mot->Err_last + pid_mot->Err_llast);//根据增量型PID控制的公式
//上下限死区设置
if(pid_mot->output>deadup)
pid_mot->output=deadup;
if(pid_mot->outputoutput=deaddown;
pid_mot->output_last=pid_mot->output;//更新上次输出值
pid_mot->Err_llast=pid_mot->Err_last; //更新上上次误差
pid_mot->Err_last = pid_mot->Err; //更新上次误差
return pid_mot->output;//PID的输出
}
串口通讯
-
编写数据发送函数
-
单字节发送
/*发送一个字符*/ void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch) { USART_SendData(pUSARTx,ch);//串口+数据 while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == 0);//等待发送数据寄存器为空 } -
双字节数据发送
void Usart_SendHalfWord( USART_TypeDef * pUSARTx, uint16_t ch) { uint8_t temp_h, temp_l; /* 取出高八位 */ temp_h = (ch&0XFF00)>>8; /* 取出低八位 */ temp_l = ch&0XFF; /* 发送高八位 */ USART_SendData(pUSARTx,temp_h); while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == 0); /* 发送低八位 */ USART_SendData(pUSARTx,temp_l); while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == 0); } -
数据帧发送函数
void Usart_Dataframe(uint8_t control,uint16_t data) { Usart_SendByte( USART1, FRA_HEAD); Usart_SendByte( USART1, control); Usart_SendHalfWord( USART1, data); Usart_SendByte( USART1, FRA_END); }
-
-
重写
printf、scanf函数///重定向c库函数printf到串口,重定向后可使用printf函数 int fputc(int ch, FILE *f) { //发送一个字节数据到串口 USART_SendData(USART1, (uint8_t) ch); //等待发送完毕 while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); return (ch); }///重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数 int fgetc(FILE *f) { //等待串口输入数据 while (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET); return (int)USART_ReceiveData(USART1); } -
编写中断处理函数
中断函数写在stm32f4xx.h文件中
//串口1中断 void eat_msg(uint8_t *res,uint8_t max); #define Max_BUFF_Len 5 uint8_t Uart2_Buffer[Max_BUFF_Len]; uint8_t Uart2_Rx=0; void USART1_IRQHandler(void) { //taskENTER_CRITICAL_FROM_ISR();//进入临界 //USART_GetITStatus(USART2, USART_IT_IDLE) != RESET//查询是否空中断 if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)//查询是否接收中断 { Uart2_Buffer[Uart2_Rx] = USART_ReceiveData(USART1); //接收串口数据到buff缓冲区 Uart2_Rx++; if(Uart2_Buffer[Uart2_Rx-1] == FRA_END) //接收到尾标识 { if(Uart2_Buffer[0] == FRA_HEAD) //检测到头标识 { //printf("%s",Uart2_Buffer); eat_msg(Uart2_Buffer,Uart2_Rx);//处理之 Uart2_Rx=0; } else { Uart2_Rx=0; } } else if(Uart2_Rx == Max_BUFF_Len)//超出最大限额 { Uart2_Rx=0; } } //taskEXIT_CRITICAL_FROM_ISR(0); }其中
eat_msg(Uart2_Buffer,Uart2_Rx)函数用来进行功能帧解析void eat_msg(uint8_t *res,uint8_t max) { if(max>=5) { int16_t data = (*((u16 *)(res+2))); if(res[1]==0x01)//设置目标角度 { if(data -
上位机设置
- 基本设置

- 收码设置

实际效果
- 速度控制曲线

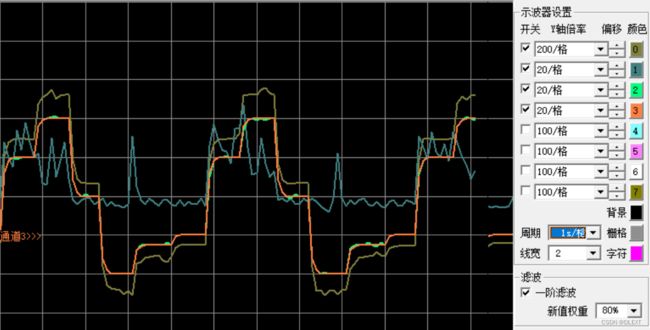
- 角度控制曲线

分析与改进
性能改善
-
改善任务调度周期
先前代码中任务阻塞延时函数使用的是
vTaskDelay(time),该函数运行时会阻塞当前任务并启动任务调度,待其他任务进入阻塞态且延时达到time个周期时才调用该任务。可认为此函数是阻塞相对时长。改善后使用
vTaskDelayUntil(&xLastWakeTime,time)函数,该函数运行时同样会阻塞当前任务并启动任务调度,当time个周期后无论是否有任务在运行都会启动任务调动(依据优先级调度)。可认为此函数是阻塞绝对时长。改善任务调度相关代码后,控制器的运行周期稳定性得到提高,控制效果提升。
-
简化任务代码
先前的任务中使用了OLED屏幕作为数据显示,但增大了CUP开销,后改为使用串口进行上位机显示,系统响应速度极大提高了。
-
电流滤波
如果需要较为精确的电流检测,可以使用平均值滤波或者中值滤波。
随动测试
系统中接入MPU6050陀螺仪作为角度给定值
使用I2C通讯
-
添加角度获取任务
由于MPU6050初始化时使用了系统延时,所以在此任务中初始化MPU6050,而不是在板卡初始化时初始化。
static void Ang_Task(void* parameter) { sys_flag.own_flag=1; float ang; float pitch,roll,yaw; //欧拉角 short aacx,aacy,aacz; //加速度传感器原始数据 short gyrox,gyroy,gyroz; //陀螺仪原始数据 //short temp; //温度 MPU_Init(); //调用了系统延时,必须在任务中进行 while(mpu_dmp_init()); while (1) { vTaskDelay(10); if(sys_flag.own_flag==1) { if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0) { //temp=MPU_Get_Temperature(); //得到温度值 MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据 MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据 ang=roll+(float)DE_ANG_UP/2; if (angMPU6050具体代码见
mpu6050.c、i2c.c、inv_mpu.c、inv_mpu_dmp_motion_driver.c文件。其中
inv_mpu.c、inv_mpu_dmp_motion_driver.c由厂商给出并进行相应移植后加入工程,具体移植过程参考网上内容。 -
测试效果

其他说明
- 项目中使用了OLED屏幕作为辅助调试,使用I2C协议通讯,占用了PE7\PE8端口,具体代码见
oled.c文件,若不使用请注释相关函数。 - 部分图片来源于网上,若有冒犯请联系删除
开源地址:https://github.com/DLABDE/DC_motor_angle_control