【手把手做ROS2机器人系统开发一】开发环境搭建
【手把手做ROS2机器人系统开发一】开发环境搭建
目录
【手把手做ROS2机器人系统开发一】开发环境搭建
一、专栏介绍:
二、开发环境搭建:
1.Ubuntu系统安装
2.ROS2系统环境安装
3.测试系统运行
一、专栏介绍:
大家好,今天给大家带来新的一专栏教程。有不足之处,请大家多多指教。专栏采用最新的软件系统和架构,为大家带来最新的体验。专栏实现目标:驱动一款常用工业机器人scar,实现机器人动态抓取目标。大家可以使用实体机器人测试,也可以使用仿真机器人测试。
专栏测试机器人硬件如下图结构:
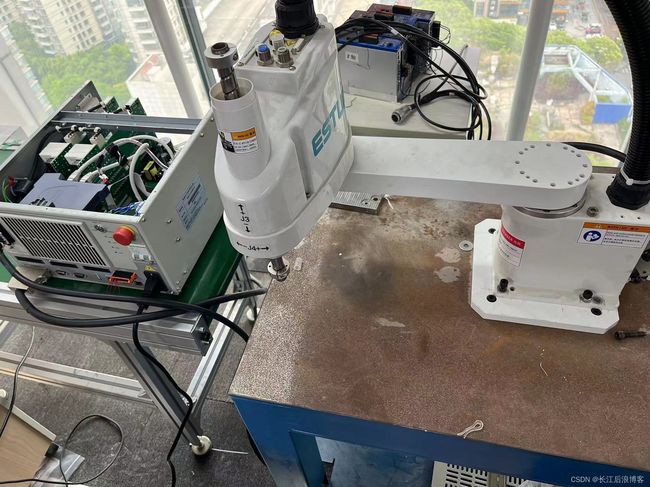
使用机械结构和驱动部分:通过ethercat总线控制驱动部分运行,pc硬件采用笔记本电脑和工控机电脑,软件部分就是本专栏的学习内容。现在开始开启学习之旅。。。。
二、开发环境搭建:
一般做新的软件系统开发,搭建测试学习编程环境是第一课。所谓万丈高楼平地起哈。第一阶段学习对应环境搭建分为两部分:
1.Ubuntu系统安装
2.ROS2系统环境安装
1.Ubuntu系统安装
学习阶段使用Oracle VM VirtualBox虚拟机,这样方便随时随地的学习。
这块软件不做具体介绍,安装下载:
https://www.oracle.com/cn/virtualization/technologies/vm/downloads/virtualbox-downloads.html
Ubuntu系统镜像下载-采用国内高校镜像源:ubuntu-22.04.2-desktop-amd64.iso
https://mirrors.tuna.tsinghua.edu.cn/ubuntu-releases/22.04/
安装注意事项:
1.虚拟机安装时候显示不全,导致无法点击下一步

解决办法: alt+F7 鼠标移动窗口位置
2.为了安装时间,采用最小化安装,不连接网络或者跳过更新

3.配置国内软件源-更新ubuntu
sudo gedit /etc/apt/sources.list修改软件源:
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-updates main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-backports main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-backports main restricted universe multiverse
# deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-security main restricted universe multiverse
# # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-security main restricted universe multiverse
deb http://security.ubuntu.com/ubuntu/ jammy-security main restricted universe multiverse
# deb-src http://security.ubuntu.com/ubuntu/ jammy-security main restricted universe multiverse
# 预发布软件源,不建议启用
# deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-proposed main restricted universe multiverse
# # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-proposed main restricted universe multiverse执行命令行软件更新命令:
sudo apt updatesudo apt upgrade 2.ROS2系统环境安装
下载 ROS 的 GPG Key
sudo apt install curl gnupg2
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg小伙伴的网络被屏蔽,无法出去,采用下述办法解决
ros-archive-keyring.gpg文件直接提供
ros-archive-keyring.gpg
将对应的密锁移动到指令的目录:
/usr/share/keyrings/
添加国内ROS2镜像源
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] https://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu jammy main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt updatesudo apt upgrade开始安装ROS2最新版本:Get Humble Hawksbill on Ubuntu Linux 22.04
安装标准桌面版:
sudo apt install ros-humble-desktop安装开发编译工具:
sudo apt install ros-dev-tools更新系统环境:
sudo gedit ~/.bashrc 追加末尾行:
export ROSDISTRO_INDEX_URL=https://mirrors.tuna.tsinghua.edu.cn/rosdistro/index-v4.yaml
source /opt/ros/humble/setup.bash 3.测试系统运行
1号终端执行:
ros2 run demo_nodes_cpp talker2号终端执行:
ros2 run demo_nodes_py listener执行结果:

三、补充内容
1、检查系统安装环境
printenv | grep -i ROS 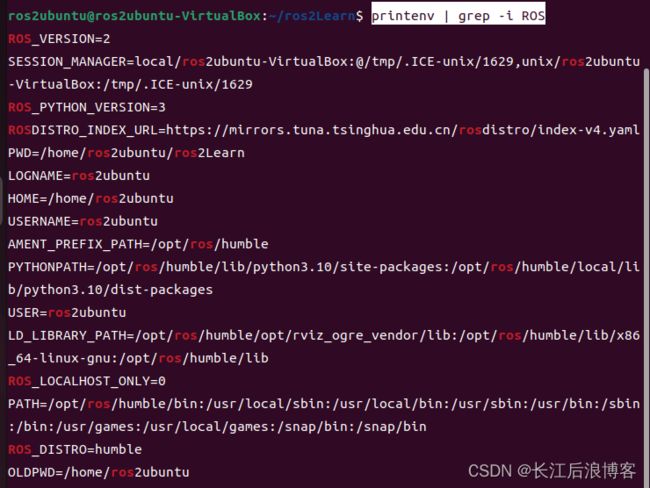
2、使用ROS域ID功能
export ROS_DOMAIN_ID=
echo "export ROS_DOMAIN_ID=98" >> ~/.bashrc
3、测试小海龟运行
启动小海龟
os2 run turtlesim turtlesim_node启动键盘节点运行
ros2 run turtlesim turtle_teleop_keyROS2系统安装搭建成功,谢谢大家阅读