DiffIR: Efficient Diffusion Model for lmage Restoration
DiffIR:用于图像复原的有效扩散模型
论文链接:https://arxiv.org/abs/2303.09472
项目链接:https://github.com/Zj-BinXia/DiffIR
Abstract
扩散模型(DM)通过将图像合成过程建模为去噪网络的顺序应用,实现了SOTA的性能。然而,与图像合成从头生成每个像素不同,图像复原(IR)的大部分像素是给定的。因此,对于IR,传统的DMs在大型模型上运行大量迭代来估计整个图像或特征映射是低效的。为了解决这个问题,我们提出了一种高效的IRDM (DiffIR),它由紧凑的IR先验提取网络(CPEN)、动态IRtransformer(DIRformer)和去噪网络组成。具体来说,DiffIR有两个训练阶段:预训练和训练DM。在预训练中,我们将真实图像输入到CPENS1中,以捕获紧凑的IR先验表示(IPR)来指导DIRformer。在第二阶段,我们只使用LQ图像训练DM直接估计与预训练的CPENS1相同的IRP。我们观察到,由于IPR只是一个紧凑向量,DiffIR可以使用比传统DM更少的迭代来获得准确的估计,并产生更稳定和真实的结果。由于迭代次数少,我们的DiffIR可以采用CPENS2、diformer和去噪网络的联合优化,进一步降低了估计误差的影响。我们在几个IR任务上进行了广泛的实验,并在消耗更少的计算成本的同时实现了SOTA性能。
1. Introduction
由于图像复原具有广泛的应用价值和病态性,它一直是一个长期存在的问题。IR的目的是复原高质量(HQ)的图像从其低质量(LQ)对应损坏的各种退化因素(例如,模糊,蒙版,降采样)。目前,基于深度学习的IR方法已经取得了令人印象深刻的成功,因为它们可以从大规模数据集中学习强先验。
最近,扩散模型(Diffusion Models, DM)[49]是由去噪自编码器层次构建的,在图像合成[21,50,10,22]和IR任务(如inpainting[37,45]和超分辨率[47])中取得了令人印象深刻的结果。具体来说,训练DM通过反向扩散过程来迭代地去噪图像。DM已经表明,原则概率扩散建模可以实现从随机抽样的高斯噪声到复杂目标分布(如真实图像或潜在分布[45])的高质量映射,而不会像GAN那样遭受模型失效和训练不稳定性。
作为一类基于似然的模型,DM需要对大型去噪模型进行大量的迭代步骤(约50 ~ 1000步)来模拟数据的精确细节,这需要消耗大量的计算资源。与从头开始生成每个像素的图像合成任务不同,IR任务只需要在给定的LQ图像上添加精确的细节。因此,如果DM采用IR图像合成的范式,不仅会浪费大量的计算资源,而且容易产生一些与给定LQ图像不匹配的细节。
本文旨在设计一个基于DM的IR网络,充分有效地利用DM强大的分布映射能力来复原图像。为此,我们提出DiffIR。由于transformer可以模拟远程像素依赖关系,我们采用transformer块作为DiffIR的基本单元。我们将transformer块以Unet的形式堆叠形成动态transformer(Dynamic IRformer,简称DIRformer)来提取和聚合多层次特征。我们分两个阶段训练DiffIR:
(1) 在第一阶段(图2 (a)),我们开发了一个紧凑的IR先验提取网络(CPEN),从真实图像中提取紧凑的IR先验表示(IPR),以指导DIRformer。此外,我们还开发了动态门控前馈网络(DGFN)和动态多头转置注意(DMTA),以充分利用IPR。值得注意的是,CPEN和DIRformer是一起优化的。
(2) 在第二阶段(图2 (b)),我们训练DM直接从LQ图像中估计准确的IPR。由于IPR较轻,仅添加细节进行复原,因此我们的DM可以估算出相当准确的IPR,并经过多次迭代获得稳定的视觉结果。
除了上述方案和架构的新颖性外,我们还展示了联合优化的有效性。在第二阶段,我们观察到估计的IPR可能仍然存在较小的误差,这将影响到DIRformer的性能。然而,以前的DM需要多次迭代,这对于将解码器一起优化DM是不可用的。由于我们的DiffIR需要很少的迭代,我们可以运行所有的迭代,得到估计的IDR,并与DIRformer联合优化。如图1所示,我们的DiffIR实现了SOTA性能,比其他基于DM的方法(例如RePaint[37]和LDM[45])消耗的计算量要少得多。特别是,DiffIR比RePaint效率高1000倍。我们的主要贡献有三个方面:
- 我们提出了DiffIR,一个强大,简单,高效的基于DMIR基线。与图像合成不同,IR输入图像的大部分像素是给定的。因此,我们利用DM强大的映射能力来估计一个紧凑的IPR来指导IR,从而提高DM在IR中的复原效率和稳定性。
- 我们提出DGTA和DGFN用于动态IRformer,以充分利用PIR。与以往单独优化去噪网络的潜在DM不同,我们提出了去噪网络和解码器(即DIRformer)的联合优化,以进一步提高估计误差的鲁棒性。
- 大量实验表明,与其他基于DM的方法相比,所提出的DiffIR可以在IR任务中实现SOTA性能,同时消耗的计算资源要少得多。

2. Related Work
图像复原。作为先驱工作,SRCNN[13]、DnCNN[79]和ARCNN[12]采用紧凑型CNN在IR上取得了令人印象深刻的性能。此后,与传统IR方法相比,基于CNN的方法更受欢迎。到目前为止,研究人员已经从不同的角度对CNN进行了研究,得到了更精细的网络架构设计和学习方案,如残差块[27,76,6]、GAN[19,60,44]、注意力[81,61,9,67,66,63,68]、知识蒸馏[62]等[24,17,28,16,71]。
近年来,自然语言处理模型transformer在计算机视觉界获得了广泛的关注。与CNN相比,transformer可以模拟不同区域之间的全局相互作用,并达到最先进的性能。目前,transformer已被广泛应用于图像识别[15,55]、图像分割[57,64,82]、目标检测[5,84]、图像复原[7,35,69,33]等视觉任务中。
扩散模型。扩散模型(Diffusion Models, DM)[21]已经在密度估计[29]和样本质量[10]方面取得了最先进的结果。DM采用参数化马尔可夫链对似然函数的下变分界进行优化,使其生成的目标分布比GAN等生成模型更精确。近年来,DM在图像复原任务领域的影响力越来越大,如超分辨率[26,47]和图像修复[37,45]。SR3[47]将DM引入到图像超分辨率中,取得了比基于SOTA GAN的方法更好的性能。此外,Palette[46]受到条件生成模型[40]的启发,提出了IR的条件扩散模型。LDM[45]提出对潜空间进行DM以提高复原效率。此外,RePaint[37]通过DM中的重采样迭代设计了一种改进的去噪策略。然而,这些基于DM的IR方法直接使用DM的范式进行图像合成。然而,IR中的大部分像素是给定的,有必要对整个图像或特征图执行DM。我们的DiffIR在紧凑的IPR上执行DM,这可以使DM过程更加高效和稳定。
3. Preliminaries: Diffusion Models
在本文中,我们采用扩散模型(diffusion models, DM)[21]来生成准确的IR先验表示(IPR)。在训练阶段,DM方法定义了一个扩散过程,将输入图像 x 0 x_0 x0转换为高斯噪声 x T ∼ N ( 0 ; 1 ) x_T \sim \mathcal{N} (0;1) xT∼N(0;1)通过T次迭代。扩散过程的每次迭代可以描述如下:
q ( x t ∣ x t − 1 ) = N ( x t ; 1 − β t x t − 1 , β t I ) , (1) q\left(x_{t}\mid x_{t-1}\right)=\mathcal{N}\left(x_{t};\sqrt{1-\beta_{t}}x_{t-1},\beta_{t}\mathbf{I}\right), \tag{1} q(xt∣xt−1)=N(xt;1−βtxt−1,βtI),(1)
式中, x t x_t xt为时间步长为 t t t的噪声图像, β t \beta_{t} βt为预定义的比例因子, N \mathcal{N} N为高斯分布。(1)式可进一步简化为:
q ( x t ∣ x 0 ) = N ( x t ; α ˉ t x 0 , ( 1 − α ˉ t ) I ) , (2) q\left(\mathbf{x}_{t}\mid\mathbf{x}_{0}\right)=\mathcal{N}\left(\mathbf{x}_{t};\sqrt{\bar{\alpha}_{t}}\mathbf{x}_{0},\left(1-\bar{\alpha}_{t}\right)\mathbf{I}\right), \tag{2} q(xt∣x0)=N(xt;αˉtx0,(1−αˉt)I),(2)
其中 α t = 1 − β t , α ˉ t = ∏ i = 0 t α i \alpha_{t}=1-\beta_{t},\bar{\alpha}_{t}=\prod_{i=0}^{t}\alpha_{i} αt=1−βt,αˉt=∏i=0tαi。
在推理阶段(反向过程),DM方法对高斯随机噪声图 x T x_T xT进行采样,然后逐步对 x T x_T xT进行降噪,直到得到高质量的输出 x 0 x_0 x0:
p ( x t − 1 ∣ x t , x 0 ) = N ( x t − 1 ; μ t ( x t , x 0 ) , σ t 2 I ) , (3) p\left(\mathbf{x}_{t-1}\mid\mathbf{x}_{t},\mathbf{x}_{0}\right)=\mathcal{N}\left(\mathbf{x}_{t-1};\mathbf{\mu}_{t}\left(\mathbf{x}_{t},\mathbf{x}_{0}\right),\sigma_{t}^{2}\mathbf{I}\right), \tag{3} p(xt−1∣xt,x0)=N(xt−1;μt(xt,x0),σt2I),(3)
其中均值 μ t ( x t , x 0 ) = 1 α t ( x t − ϵ 1 − α t 1 − α ~ t ) \mu_{t}\left(\mathbf{x}_{t},\mathbf{x}_{0}\right)={\frac{1}{\sqrt{\alpha_{t}}}}\left(\mathbf{x}_{t}-\epsilon{\frac{1-\alpha_{t}}{\sqrt{1-\tilde{\alpha}_{t}}}}\right) μt(xt,x0)=αt1(xt−ϵ1−α~t1−αt)和方差 σ t 2 = 1 − α ˉ t − 1 1 − α ˉ t β t \sigma_{t}^{2}=\frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_{t}}\beta_{t} σt2=1−αˉt1−αˉt−1βt。 ϵ \epsilon ϵ表示 x t x_t xt中的噪声,它是反向过程中唯一的不确定变量。DM采用去噪网络 ϵ θ ( x t ; T ) \epsilon_θ(x_t;T) ϵθ(xt;T)估计 ϵ \epsilon ϵ。训练 ϵ θ ( x t ; T ) \epsilon_θ(x_t;T) ϵθ(xt;T),给定一个干净的图像 x 0 x_0 x0, DM随机采样时间步长 t t t和噪声 ϵ ∼ N ( 0 , I ) \epsilon\sim\mathcal{N}(0,\mathbf{I}) ϵ∼N(0,I)根据公式(2)生成带噪图像 x t x_t xt。然后,DM对 ϵ θ \epsilon_θ ϵθ的网络参数θ进行如下优化[21]:
∇ θ ∥ ϵ − ϵ θ ( α ˉ t x 0 + ϵ 1 − α ˉ t , t ) ∥ 2 2 . (4) \nabla_{\theta}\left\|\epsilon-\epsilon_{\theta}\left(\sqrt{\bar{\alpha}_{t}}\mathrm{x}_{0}+\epsilon\sqrt{1-\bar{\alpha}_{t}},t\right)\right\|_{2}^{2}. \tag{4} ∇θ ϵ−ϵθ(αˉtx0+ϵ1−αˉt,t) 22.(4)
4. Methodology
传统的DM[49,45,37]需要大量的迭代、计算资源和模型参数来生成准确逼真的图像或潜在特征图。尽管DM在从头生成图像(图像合成)方面取得了令人印象深刻的性能,但将图像合成的DM范例直接应用于IR是浪费计算资源。由于IR中的大部分像素和信息都是给定的,因此对整幅图像或特征图进行DM不仅需要大量的迭代和计算,而且容易产生更多的伪影。总体而言,DM具有较强的数据估计能力,但将现有的DM模式应用到IR图像合成中效率不高。为了解决这一问题,我们提出了一种有效的IR分解模型(即DiffIR),它采用分解模型估计一个紧凑的IPR来指导网络复原图像。由于IPR相当轻,因此与传统DM相比,DiffIR的模型尺寸和迭代可以大大减少,从而产生更准确的估计。

在本节中,我们将介绍DiffIR。如图2所示,DiffIR主要由紧凑的IR先验提取网络(CPEN)、动态IR transformer(DIRformer)和去噪网络组成。我们分两个阶段训练DiffIR,包括DiffIR的预训练和扩散模型的训练。在接下来的章节中,我们首先介绍4.1节中的预训练DiffIR。然后,我们在4.2节中提供了DiffIR的训练效率DM的细节。
4.1. Pretrain DiffIR
在介绍预训练DiffIR之前,我们想在第一阶段介绍两个网络,包括紧凑型IR先验提取网络(CPEN)和动态IRformer (DIRformer)。CPEN的结构如图2黄色方框所示,主要由残差块和线性层堆叠,以提取紧凑的IR先验表示(IPR)。之后,DIRformer可以使用提取的IDR来复原LQ图像。DIRformer的结构如图2粉色方框所示,由Unet形状的动态DIRformer块堆叠而成。动态DIRformertransformer模块由动态多磁头转置注意(DMTA,图2绿框)和动态门控前馈网络(DGFN,图2蓝框)组成,可以使用IDR作为动态调制参数,将复原细节添加到特征图中。
在预训练中(图2 (a)),我们将CPENS1和DIRformer一起训练。具体来说,我们首先将ground-truth和LQ图像连接在一起,并使用PixelUnshuffle操作对它们进行下采样,以获得CPENS1的输入。然后,CPENS1提取IPR Z ∈ R 4 C ′ \mathbf{Z}\in\mathbb{R}^{4C^{\prime}} Z∈R4C′为:
Z = C P E N S 1 ( P i x e l U n s h u f f l e ( C o n c a t ( I G T , I L Q ) ) ) . (5) \mathbf{Z}=\mathrm{CPEN}_{\mathrm{S}1}(\mathrm{PixelUnshuffle}(\mathrm{Concat}(I_{GT},I_{LQ}))). \tag{5} Z=CPENS1(PixelUnshuffle(Concat(IGT,ILQ))).(5)
然后将IPR Z作为动态调制参数送入DIRformer的DGFN和DMTA,指导复原:
F ′ = W l 1 Z ⊙ N o r m ( F ) + W l 2 Z , (6) \mathbf{F}^{\prime}=W_{l}^{1}\mathbf{Z}\odot\mathrm{Norm}(\mathbf{F})+W_{l}^{2}\mathbf{Z}, \tag{6} F′=Wl1Z⊙Norm(F)+Wl2Z,(6)
式中 ⊙ \odot ⊙表示逐元素乘法,Norm表示层归一化[2], W l W_l Wl表示线性层, F \mathbf{F} F和 F ′ ∈ R H ^ × W ^ × C ^ \mathbf{F}^{\prime} \in \mathbb{R}^{\hat{H} \times \hat{W} \times \hat{C}} F′∈RH^×W^×C^分别为输入和输出特征映射, W l 1 Z , W l 2 Z ∈ R C W_l^1 \mathbf{Z}, W_l^2 \mathbf{Z} \in \mathbb{R}^C Wl1Z,Wl2Z∈RC。
然后,我们在DMTA中聚合了全局空间信息。具体来说, F ′ \mathbf{F}^{\prime} F′被投影为查询 Q = W d Q W c Q F ′ \mathbf{Q}=W_d^Q W_c^Q \mathbf{F}^{\prime} Q=WdQWcQF′,键 K = W d K W c K F ′ \mathbf{K}=W_d^K W_c^K \mathbf{F}^{\prime} K=WdKWcKF′,值 V = W d V W c V F ′ \mathbf{V}=W_d^V W_c^V \mathbf{F}^{\prime} V=WdVWcVF′,其中 W c W_c Wc为 1 × 1 1 \times 1 1×1点卷积, W d W_d Wd为 3 × 3 3 \times 3 3×3深度卷积。接下来,我们重塑查询, Q ^ ∈ R A ^ W ^ × C ^ \hat{\mathbf{Q}} \in \mathbb{R}^{\hat{A} \hat{W} \times \hat{C}} Q^∈RA^W^×C^,键 K ^ ∈ R C × ^ H ^ \hat{\mathbf{K}} \in \mathbb{R}^{\hat{C \times} \hat{H}} K^∈RC×^H^和值 V ^ ∈ R H ^ W ^ × C ^ \hat{\mathbf{V}} \in \mathbb{R}^{\hat{H} \hat{W} \times \hat{C}} V^∈RH^W^×C^。之后,我们在 Q ^ \hat{\mathbf{Q}} Q^和 K ^ \hat{\mathbf{K}} K^之间进行点积,生成大小为的 R C × C \mathbb{R}^{C \times C} RC×C转置注意图 A \mathbf{A} A,它比大小为 R H ^ W ^ × H ^ W ^ \mathbb{R}^{\hat{H} \hat{W} \times \hat{H} \hat{W}} RH^W^×H^W^的常规注意图更有效。DMTA的整个过程可以描述如下:
F ^ = W c V ^ ⋅ Softmax ( K ^ ⋅ Q ^ / γ ) + F , (7) \hat{\mathbf{F}}=W_c \hat{\mathbf{V}} \cdot \operatorname{Softmax}(\hat{\mathbf{K}} \cdot \hat{\mathbf{Q}} / \gamma)+\mathbf{F}, \tag{7} F^=WcV^⋅Softmax(K^⋅Q^/γ)+F,(7)
其中 γ \gamma γ是可学习的缩放参数。与传统的多头自注意一样[15,7],我们将通道划分为多头并计算注意图。
接下来,在DGFN中,我们聚合局部特征。我们使用1×1卷积对不同通道的信息进行聚合,采用3 × 3深度卷积对空间相邻像素的信息进行聚合。此外,我们还采用了门控机制来增强信息编码。DGFN的整个过程定义为:
F ^ = G E L U ( W d 1 W c 1 F ′ ) ⊙ W d 2 W c 2 F ′ + F . (8) \mathbf{\hat{F}}=\mathrm{GELU}\left(W_{d}^{1}W_{c}^{1}\mathbf{F}^{\prime}\right)\odot W_{d}^{2}W_{c}^{2}\mathbf{F}^{\prime}+\mathbf{F}. \tag{8} F^=GELU(Wd1Wc1F′)⊙Wd2Wc2F′+F.(8)
我们将CPENS1和DIRformer一起训练,使DIRformer能够充分利用CPENS1提取的IPR进行复原。训练损失定义如下:
L r e c = ∥ I G T − I ^ H Q ∥ 1 , (9) L_{rec}=\left\|I_{GT}-\hat{I}_{HQ}\right\|_{1}, \tag{9} Lrec= IGT−I^HQ 1,(9)
其中 I G T I_{GT} IGT和 I ^ H Q \hat{I}_{HQ} I^HQ分别是ground-truth和复原的HQ图像。 ∥ ⋅ ∥ 1 \|\cdot\|_1 ∥⋅∥1表示L1范数。如果有些工作强调视觉质量,如inpainting和SISR,我们可以进一步增加感性损失和对抗性损失。在补充材料中提供了更多的细节。
4.2. 图像复原的扩散模型
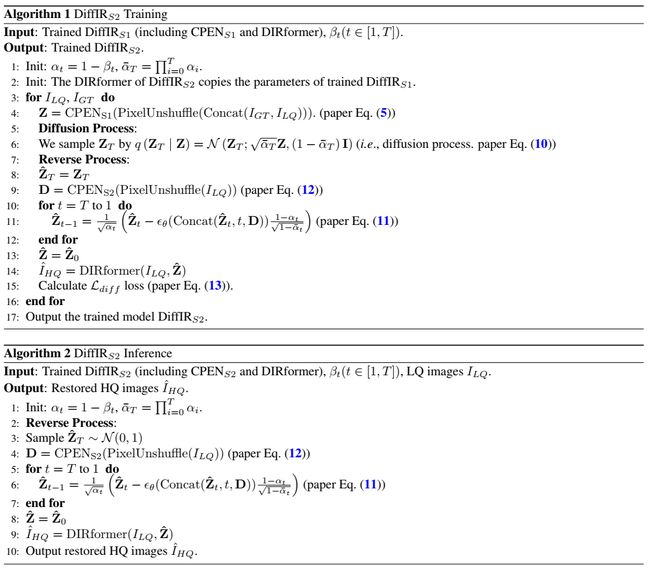
在第二阶段(图2 (b)),我们利用DM强大的数据估计能力来估计IPR。具体来说,我们使用预训练的CPENS1来捕获IPR Z ∈ R 4 C ′ \mathbf{Z}\in\mathbb{R}^{4C^{\prime}} Z∈R4C′。之后,我们将Z上的扩散过程应用到采样 Z T ∈ R 4 C ′ \mathbf{Z}_T\in\mathbb{R}^{4C^{\prime}} ZT∈R4C′上,可以描述为:
q ( Z T ∣ Z ) = N ( Z T ; α ˉ T Z , ( 1 − α ˉ T ) I ) , (10) q\left(\mathbf{Z}_{T}\mid\mathbf{Z}\right)=\mathcal{N}\left(\mathbf{Z}_{T};\sqrt{\bar{\alpha}_{T}}\mathbf{Z},\left(1-\bar{\alpha}_{T}\right)\mathbf{I}\right), \tag{10} q(ZT∣Z)=N(ZT;αˉTZ,(1−αˉT)I),(10)
其中T是迭代的总次数, α ˉ \bar{\alpha} αˉ和 α \alpha α在公式(1)和(2)中定义。(即 α ˉ T = ∏ i = 0 T α i \bar{\alpha}_{T}=\prod_{i=0}^{T}\alpha_{i} αˉT=∏i=0Tαi)。
在反向的过程中,由于IPR是紧凑的,DiffIRS2可以使用比传统DM更少的迭代和更小的模型尺寸来获得相当好的估计[45,37]。由于传统的DM在迭代中有巨大的计算成本,它们必须随机采样一个时间步 t ∈ [ 1 , T ] t \in [1,T] t∈[1,T],仅在该时间步长优化去噪网络(公式(1)、(2)、(3)、(4))由于去噪网络和解码器(即DIRformer)缺乏联合训练,意味着去噪网络引起的估计误差很小,使DIRformer无法发挥其潜力。相比之下,DiffIR从第t个时间步长(公式(10))开始,运行所有去噪迭代(公式(11)),得到 Z ^ \hat{Z} Z^,并将其传递给DIRformer进行联合优化。
Z ^ t − 1 = 1 α t ( Z ^ t − ϵ 1 − α t 1 − α ˉ t ) , (11) \hat{\mathbf{Z}}_{t-1}=\frac{1}{\sqrt{\alpha_{t}}}\left(\hat{\mathbf{Z}}_{t}-\epsilon\frac{1-\alpha_{t}}{\sqrt{1-\bar{\alpha}_{t}}}\right), \tag{11} Z^t−1=αt1(Z^t−ϵ1−αˉt1−αt),(11)
其中 ϵ \epsilon ϵ表示相同的噪声,我们使用CPENS2和去噪网络来预测公式(3)中的噪声。值得注意的是,与公式(3)中的传统DM不同,我们的DiffIRS2删除了方差估计,并发现它有助于准确的IPR估计和更好的性能(第6节)。
在DM的反向过程中,我们首先使用CPENS2从LQ图像中获得条件向量 D ∈ R 4 C ′ \mathbf{D}\in\mathbb{R}^{4C^{\prime}} D∈R4C′:
D = C P E N S 2 ( P i x e l U n s h u f f l e ( I L Q ) ) , (12) \mathbf{D}=\mathrm{CPEN}_{\mathrm{S}2}(\mathrm{PixelUnshuffle}(I_{LQ})), \tag{12} D=CPENS2(PixelUnshuffle(ILQ)),(12)
其中,除了第一次卷积的输入维不同,CPENS2与CPENS1具有相同的结构。然后,我们使用去噪网络θ估计每个时间步t中的噪声为 ϵ θ ( C o n c a t ( Z ^ t , t , D ) ) . \epsilon_{\theta}(\mathrm{Concat}(\hat{\mathbf{Z}}_{t},t,\mathbf{D})). ϵθ(Concat(Z^t,t,D)).。将估计的噪声代入公式(11),得到 Z ^ t − 1 \hat{Z}_{t−1} Z^t−1,开始下一次迭代。
然后,经过T次迭代,我们得到最终估计的IPR Z ^ ∈ R 4 C ′ \hat{\mathbf{Z}}\in\mathbb{R}^{4C^{\prime}} Z^∈R4C′。我们使用Lall联合训练DPENS2、去噪网络和DIRformer:
L d i f f = 1 4 C ′ ∑ i = 1 4 C ′ ∣ Z ^ ( i ) − Z ( i ) ∣ , L a l l = L r e c + L d i f f , (13) \begin{aligned}\mathcal{L}_{diff}=\frac{1}{4C'}\sum_{i=1}^{4C'}\left|\hat{\mathbf{Z}}(i)-\mathbf{Z}(i)\right|, \mathcal{L}_{all}=\mathcal{L}_{rec}+\mathcal{L}_{diff}, \end{aligned} \tag{13} Ldiff=4C′1i=1∑4C′ Z^(i)−Z(i) ,Lall=Lrec+Ldiff,(13)
我们可以在Lall中进一步添加感知损失和对抗损失,以获得更好的视觉质量,如公式(9)。
在推理阶段,我们只使用反向扩散过程(图2 (b)底部)。CPENS2从LQ图像中提取条件向量D,随机抽取高斯噪声 Z ^ T \hat{Z}_T Z^T。去噪网络利用 Z ^ T \hat{Z}_T Z^T和D来估计T次迭代后的IPR Z ^ \hat{Z} Z^。之后,DIRformer利用IPR复原LQ映像。
5. Experiments
5.1. 实验设置
我们将我们的方法分别应用于三种典型的IR任务:(a)图像修复,(b)图像超分辨率(SR), ©单图像运动去模糊。我们的DiffIR采用4级编码器-解码器结构。从1级到4级,DMTA的注意头依次为[1,2,4,8],通道数为[48,96,192,384]。此外,在所有IR任务中,我们调整了DIRformer中动态transformer块的数量,以比较DiffIR和SOTA方法在相似参数和计算成本方面的差异。具体来说,从第1层到第4层,我们设置动态transformer块数为[1,1,1,9]、[13,1,1,1],[3,5,6,6]分别用于图像修复、SR和去模糊。此外,根据之前的工作[37,45],我们引入了针对图像修复和SR的对抗损失和感知损失。CPEN的通道数 C ′ C' C′设置为64。
在训练扩散模型时,将总时间步长T设为4,公式(11)中的βt (αt = 1−βt)从β1 = 0.1线性增加到βt = 0.99。我们使用Adam优化器(β1 = 0.9, β2 = 0.99)训练模型。更多的细节载于补充材料中。
5.2. 图像修复评估
我们使用LaMa的相同设置来训练和验证我们的DiffIRS2的inpainting[52]。具体来说,我们分别在Places-Standard[83]和CelebA-HQ[25]数据集上训练了batch大小为30和patch大小为256的DiffIR。我们使用LPIPS[80]和FID[20]在验证数据集上比较了DiffIRS2与SOTA的图像修复方法(ICT [56], LaMa[52]和RePaint[37])。
定量结果如表1和图1 (a)所示。我们可以看到,我们的DiffIRS2明显优于其他方法。具体来说,我们的DiffIRS2超过竞争方法LaMa的FID裕度高达0.2706和0.5583,在Places和CelebA-HQ上具有宽掩模,消耗相似的参数和multiadd总数。此外,与基于DM的RePaint方法相比[45],我们的DiffIRS2在仅消耗4.3%的参数和0.1%的计算资源的情况下可以获得更好的性能。这表明DiffIR可以充分有效地利用DM对IR的数据估计能力。

定性结果如图3所示。我们的DiffIRS2可以产生比其他竞争对手的图像补全方法更真实合理的结构和细节。在补充材料中提供了更多的定性结果。

5.3. 图像超分辨率评估
我们在图像超分辨率上训练和验证了DiffIRS2。具体来说,我们在DIV2K[1] (800张图像)和Flickr2K[54] (2650张图像)数据集上训练DiffIRS2,用于4倍超分辨率。批量大小设置为64,LQ补丁大小设置为64×64。我们使用LPIPS[80]和DISTS[11]在五个基准(Set5 [3], Set14 [72], General100 [14], Urban100[23]和DIV2K100[1])上评估了我们的DiffIRS2和其他基于SOTA GAN的SR方法。
表2和图1 (b)显示了DiffIRS2与基于SOTA GAN的SR方法SFTGAN[59]、SRGAN[32]、ESRGAN[60]、USRGAN[75]、SPSR[39]和BebyGAN[34]的性能和multiadd比较。我们可以看到DiffIRS2达到了最好的性能。与竞争对手的SR方法BebyGAN相比,我们的DiffIRS2在General100和Urban100上的LPIPS差值高达0.0121和0.0175,而仅消耗63%的计算资源。此外,值得注意的是,DiffIRS2在消耗2%计算资源的情况下显著优于基于DM的方法LDM。

定性结果如图4所示。DiffIRS2实现了最好的视觉质量,包含更多的现实细节。这些视觉对比与定量结果一致,显示了DiffIR的优越性。DiffIR可以有效地使用强大的DM来复原图像。补充材料中给出了更多的视觉结果。

5.4. 图像运动去模糊评估
我们在GoPro[41]数据集上训练DiffIR用于图像运动去模糊,并在两个经典基准(GoPro, HIDE[48])上评估DiffIR。我们将DiffIRS2与最先进的图像运动去模糊方法进行了比较,包括Restormer[69]、MPRNet[70]和IPT[7]。
定量结果(PSNR和SSIM)如表3所示,Multi-Adds如图1 ©所示。我们可以看到,我们的DiffIRS2优于其他运动去模糊方法。具体来说,DiffIRS2在GoPro上分别比IPT和MIMIUnet+高0.68 dB和0.54 dB。此外,DiffIRS2在GoPro和HIDE数据集上分别比Restormer高0.28 dB和0.33 dB,仅消耗78%的计算资源。这证明了DiffIR的有效性。

定性结果如图5所示,我们的DiffIRS2具有最好的视觉质量,包含更接近相应HQ图像的逼真细节。在补充材料中提供了更多的定性结果。

6. Ablation Study
图像复原的有效扩散模型。在这一部分中,我们验证了DiffIR中DM、DM的训练方案以及是否在DM中插入方差噪声等成分的有效性(表4)。

(1) DiffIRS2- v3实际为表1中采用的DiffIRS2, DiffIRS1为以真地图像为输入的第一阶段预训练网络。比较DiffIRS1和DiffIRS2-V3,我们可以看到DiffIRS2-V3的LPIPS与DiffIRS1非常相似,这意味着DM具有强大的数据建模能力,可以准确预测IPR。
(2) 为了进一步证明DM的有效性,我们取消了在DiffIRS2-V3中使用DM来获得DiffIRS2V1。比较DiffIRS2-V1和DiffIRS2-V3,我们可以看到DiffIRS2-V3(使用DM)明显优于DiffIRS2-V1。这意味着DM学习到的IPR可以有效地指导DIRformer复原LQ图像。
(3) 为了探索更好的DM训练方案,我们比较了传统DM优化和我们提出的联合优化两种训练方案。由于传统的DM[45,49]需要多次迭代来估计大型图像或特征图,因此必须采用传统的DM优化,通过随机采样一个时间步来优化去噪网络,而后者无法使用后面的解码器(即本文中的DIRformer)进行优化。由于DiffIR仅使用DM来估计紧凑的一维向量IPR,因此我们可以使用多次迭代来获得相当准确的结果。因此,我们可以采用联合优化的方式,运行去噪网络的所有迭代,获得IPR并与DIRformer共同优化。比较DiffIRS2-V2和DiffIRS2-V3, DiffIRS2-V3显著超过了DiffIRS2-V2,这证明了我们提出的联合优化训练DM的有效性。这是因为DM在IPR中较小的估计误差可能导致DIRformer的性能下降。联合培训DM和DIRformer可以解决这个问题。
(4) 在传统的DM方法中,他们会在反向DM过程中插入方差噪声(公式(3))来生成更真实的图像。与传统的DM预测图像或特征图不同,我们使用DM来估计IPR。在DiffIRS2-V4中,我们在反向DM过程中添加噪声。我们可以看到,DiffIRS2-V3比DiffIRS2-V4实现了更好的性能。这意味着为了保证估计的IPR的准确性,最好消除添加噪声。
DM的损失函数。我们探索哪种损失函数最适合指导去噪网络和CPENS2学习从LQ图像中估计准确的IPR。这里,我们定义了三个损失函数。(1)我们定义Ldif进行优化(公式(13))。(2)我们采用L2 (公式(14))来度量估计误差。(3)我们使用Kullback Leibler散度来度量分布相似性(Lkl, 公式(15))。
L 2 = 1 4 C ′ ∑ i = 1 4 C ′ ( Z ^ ( i ) − Z ( i ) ) 2 , L k l = ∑ i = 1 4 C ′ Z n o r m ( i ) log ( Z n o r m ( i ) Z ^ n o r m ( i ) ) , \begin{align} \mathcal{L}_{2}=\frac{1}{4C^{\prime}}\sum_{i=1}^{4C^{\prime}}\left(\hat{\mathbf{Z}}(i)-\mathbf{Z}(i)\right)^{2}, \tag{14} \\ \mathcal{L}_{kl}=\sum_{i=1}^{4C^{\prime}}\mathbf{Z}_{norm}(i)\log\left(\frac{\mathbf{Z}_{norm}(i)}{\mathbf{\hat{Z}}_{norm}(i)}\right), \tag{15} \end{align} L2=4C′1i=1∑4C′(Z^(i)−Z(i))2,Lkl=i=1∑4C′Znorm(i)log(Z^norm(i)Znorm(i)),(14)(15)
其中 Z ^ \hat{\mathbf{Z}} Z^和 Z ∈ R 4 C ′ \mathbf{Z} \in \mathbb{R}^{4 C^{\prime}} Z∈R4C′分别为DiffIRS1和DiffIRS2提取的IPR。 Z ^ norm \hat{\mathbf{Z}}_{\text {norm }} Z^norm 和 Z norm ∈ R 4 C ′ \mathbf{Z}_{\text {norm }} \in \mathbb{R}^{4 C^{\prime}} Znorm ∈R4C′分别用 Z ^ \hat{\mathbf{Z}} Z^和 Z \mathbf{Z} Z的softmax操作归一化。我们分别在DiffIRS2上应用这三个损失函数,学习直接从LQ图像中估计准确的IPR。然后,我们在CelebA-HQ上对他们进行了评估。结果如表5所示。我们可以看到Ldif的性能优于L2和Lkl。

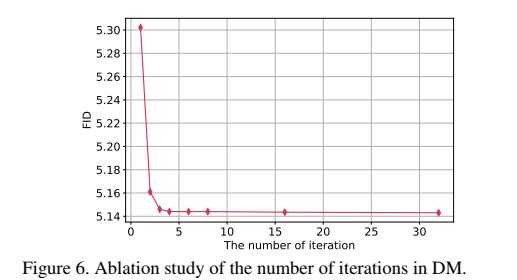
迭代次数的影响。在这一部分中,我们将探讨DM中的迭代次数如何影响DiffIRS2的性能。我们在DiffIRS2中设置了不同的迭代次数,并在公式(10)中调整βt(αt=1−βt),使Z在扩散过程(即 α ˉ T → 0 \bar{\alpha}_{T}\rightarrow0 αˉT→0)后成为高斯噪声 Z T ∼ N ( 0 , 1 ) Z_T\sim \mathcal{N}(0,1) ZT∼N(0,1)。结果如图6所示。当迭代增加到3次时,DiffIRS2的性能将显著提高。当迭代次数大于4次时,DiffIRS2几乎保持稳定,即达到上界。此外,我们可以看到,我们的DiffIRS2收敛速度比传统DM更快(需要200多次迭代)。这是因为我们仅仅对IPR(一个紧凑的一维向量)执行DM。
7. Conclusion
传统的DM在图像合成方面取得了令人印象深刻的性能。与从头开始生成每个像素的图像合成不同,IR给出了LQ图像作为参考。因此,将传统的决策模型直接应用于IR是低效的。在本文中,我们提出了一种有效的IR扩散模型(即DiffIR),该模型由CPEN、Diformer和去噪网络组成。具体来说,我们首先将ground-truth 图像输入到CPENS1中,生成一个紧凑的IPR来指导DIRformer。然后,我们训练DM来估计CPENS1提取的IPR。与传统的DM相比,我们的DiffIR可以比传统的DM使用更少的迭代来获得准确的估计,并减少复原图像中的伪影。此外,由于迭代次数少,我们的DiffIR可以采用CPENS2、Diformer和去噪网络的联合优化,以减少估计误差的影响。大量实验表明,DiffIR可以达到一般的SOTA IR性能。
Appendix
A. Appendix
B. Evaluation on Real-world SR

C. Algorithm