一、理论
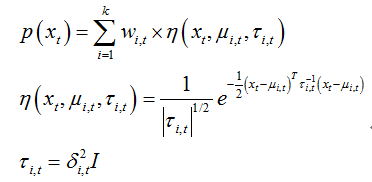
对于多峰高斯分布模型,图像的每一个像素点按不同权值的多个高斯分布的叠加来建模,每种高斯分布对应一个可能产生像素点所呈现颜色的状态,各个高斯分布的权值和分布参数随时间更新。当处理彩色图像时,假定图像像素点R、G、B三色通道相互独立并具有相同的方差。对于随机变量 X 的观测数据集{ x1 , x2 ,…, xN }, xt =( rt , gt , bt )为 t 时刻像素的样本,则单个采样点 xt 其服从的混合高斯分布概率密度函数:
k 为分布模式总数,η (xt ,μi,t , τi,t )为t 时刻第i 个高斯分布,μi,t 为其均值,τi,t 为其协方差矩阵,δi,t 为方差,I 为三维单位矩阵,ωi,t 为t 时刻第i 个高斯分布的权重。
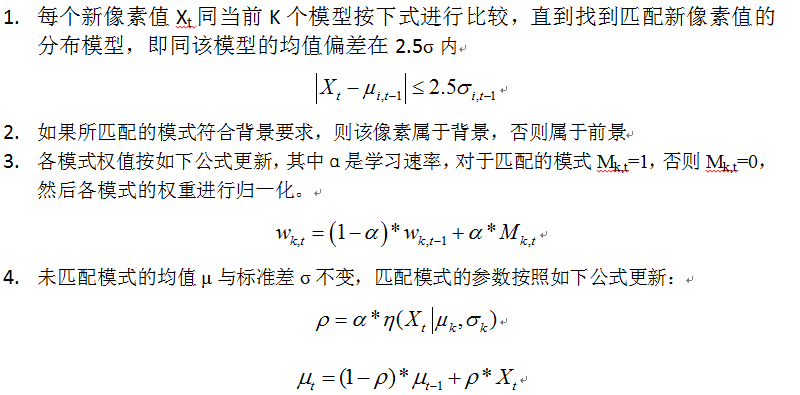
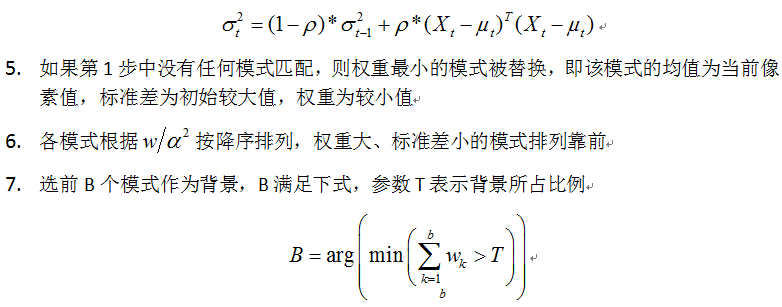
详细算法流程:
由于能力有限,代码来自实验室的师兄写的代码,我从中学到了很多内容。
//混合高斯背景建模 File name: MixtureGaussian.cpp Author: source code by RamiYim Version: cs-hhu-cn0.0 Date: 20150208 Description: background modelling by mixture gaussian Others: Function List: mixtureGaussian(); History: ,<20150208>,,<20150505><0.0><第一次创建函数> //高斯分布个数number of gaussian components (typically 3-5) //背景分布个数number of background components //初始标准差initial standard deviation (for new components) var = 36 in paper //学习速率a learning rate (between 0 and 1) (from paper 0.01) //偏差阈值λ positive deviation threshold //前景阈值 foreground threshold (0.25 or 0.75 in paper) //initial rho variable (used to update lpv_mean and lpv_std)<20150208><0.0><第一次创建函数> //number of gaussian components (typically 3-5) //number of background components //initial standard deviation (for new components) var = 36 in paper //learning rate (between 0 and 1) (from paper 0.01) //positive deviation threshold //foreground threshold (0.25 or 0.75 in paper) //initial rho variable (used to update lpv_mean and lpv_std) //foreground array //background array //pixel means //pixel standard deviations //difference of each pixel from lpv_mean // variable to single component match // end while