STM32内存管理方法
一、问题背景
最近在研究内存管理的时候,看见了正点原子的代码,不过由于我使用的是GCC编译,很多地方必须修改,于是就看见了下面这篇文章,并解决了问题。
STM32 .ld链接文件分析及一次bug解决过程
不过,在查资料的途中又遇见了这篇文章,开了眼界。
两种内存池管理方法对比
于是,为了学习内存管理思想的精妙,故留下此学习笔记,以作总结,有错误还请多多包涵。
二、介绍
内存管理,是指软件运行时对计算机内存资源的分配和使用的技术。其最主要的目的是如
何高效,快速的分配,并且在适当的时候释放和回收内存资源。
在我们学习C语言的时候,有学习到malloc和free,一般情况下,C程序使用malloc()在堆上分配内存,free()释放内存。
malloc工作原理
malloc函数分配的内存是在堆(heap)上的。操作系统有一个记录空闲内存地址的链表,当系统收到程序的申请时,会遍历该链表,寻找第一个空间大于所申请空间的堆结点,然后将该结点从空闲结点链表中删除,并将该结点的空间分配给程序,另外,对于大多数系统,会在这块内存空间中的首地址处记录本次分配的大小,这样代码中的delete或free语句才能正确的释放本内存空间。我们常说的内存泄露,最常见的就是堆泄露(还有资源泄露),它是指程序在运行中出现泄露,如果程序被关闭掉的话,操作系统会帮助释放泄漏的内存。
malloc的使用
malloc函数使用起来倒是挺简单的,主要的使用范例有两种:一是动态分配结构体,通常用于被称为“链表”的数据结构中;二是分配可变长度的数组。
有几点值得注意:
1.调用malloc函数后,应该对函数返回值进行检查。前面说过,内存分配一旦失败,malloc()会返回NULL。
char *p = NULL;
p = (char *)malloc(sizeof(char));
if(!p)
return;2.在程序结束时,应该调用free函数对malloc函数分配的内存进行释放。
实际上,c语言标准没有规定要这么做,而且普通的PC上的操作系统,在进程结束时,肯定会释放曾经分配给当前进程的内存空间,也就是说,在程序结束之前,没有必要调用free()。但是,对于一串连续的程序处理事件,如果先前程序分配的内存没有及时释放掉,那后面的工作就遭殃了。所以”malloc与free配套出现”还是相当合理的。
三、固定大小内存块分配
讲了这么多题外话,现在让我们在单片机上实现内存管理吧。
参考《STM32F1开发指南-HAL库版本_V1.1.pdf》
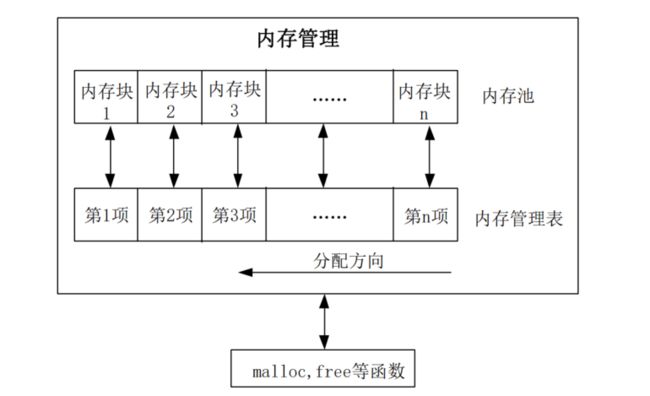
我们将内存池分为n块,对应到内存管理表上。
内存管理表的意义就是:
当该项值为 0 的时候,代表对应的内存块未被占用;
当该项值非零的时候,代表该项对应的内存块已经被占用,其数值则代表被连续占用的内存块数。
比如某项值为 10,那么说明包括本项对应的内存块在内,总共分配了 10 个内存块给外部的某
个指针。
内寸分配方向如图所示,是从顶→底的分配方向。即首先从最末端开始找空内存。当内存管理刚初始化的时候,内存表全部清零,表示没有任何内存块被占用。
分配原理
当指针p调用malloc申请内存的时候,先判断p要分配的内存块数(m),然后从第n项开始,向下查找,直到找到m块连续的空内存块(即对应内存管理表项为0),然后将这m个内存管理表项的值都设置为m(标记被占用),最后,把最后的这个空内存块的地址返回指针p,完成一次分配。注意,如果当内存不够的时候(找到最后也没找到连续的m块空闲内存),则返回NULL给p,表示分配失败。
u32 _mem_malloc(u8 memx, u32 size)//memx:要选择申请的内存区域 size:申请的大小
{
signed long offset;//地址偏移
u32 nmemb; //需要的内存块数
u32 cmemb = 0; //连续空内存块数
if (!malloc_dev.memrdy[memx]) malloc_dev.init(memx);//未初始化
if (size == 0) return 0xFFFFFFFF; //不需要分配了
nmemb = size / memblksize[memx]; //获取需要分配的连续内存块数
if(size % memblksize[memx]) nmemb++;//不满一块的按一块算
for(offset = memtblsize[memx]-1; offset >= 0; offset --)
{
if(!malloc_dev.memmap[memx][offset])cmemb++;//连着是空的
else cmemb = 0;//连续的条件被打断了
if(cmemb == nmemb) //找到了
{
for(u32 i = 0; i < nmemb; i++)
{
malloc_dev.memmap[memx][offset + i] = nmemb; //填表
}
return (offset*memblksize[memx]);;//返回偏移地址
}
}
return 0XFFFFFFFF;//未找到符合分配条件的内存块
}释放原理
当p申请的内存用完,需要释放的时候,调用free函数实现。free函数先判断p指向的内存地址所对应的内存块,然后找到对应的内存管理表项目,得到p所占用的内存块数目m(内存管理表项目的值就是所分配内存块的数目),将这m个内存管理表项目的值都清零,标记释放,完成一次内存释放。
u8 _mem_free(u8 memx,u32 offset)
{
if (!malloc_dev.memrdy[memx])
{
malloc_dev.init(memx);//未初始化
return Fail;
}
if (offset < memsize[memx]) //偏移在内存池中
{
int index = offset/memblksize[memx]; //偏移所在内存块号码
int nmemb=malloc_dev.memmap[memx][index]; //内存块数量
for(int i=0; i < nmemb; i++) //给这些内存块清零
{
malloc_dev.memmap[memx][index+i] = 0;
}
return OK;//释放成功了,yeah
}
else //偏移超区了.
{
return Fail;
}
}看一下完整的代码:
malloc.h
#ifndef HELLOWORLD_MALLOC_H
#define HELLOWORLD_MALLOC_H
#include "main.h"
#ifndef NULL
#define NULL 0
#endif
#ifndef OK
#define OK 0
#endif
#ifndef Fail
#define Fail 1
#endif
#define SRAM_IN 0 //内部SRAM
#define SRAM_EX 1 //外部SRAM
#define SRAMBANK 2
//mem1 内部SRAM
#define MEM1_BLOCK_SIZE 16 //每个内存块为16字节
#define MEM1_MAX_SIZE 40*1024 //40KB
#define MEM1_ALLOC_TABLE_SIZE MEM1_MAX_SIZE/MEM1_BLOCK_SIZE
//mem2 外部SRAM
#define MEM2_BLOCK_SIZE 32 //每个内存块为32字节
#define MEM2_MAX_SIZE 960*1024 //960KB
#define MEM2_ALLOC_TABLE_SIZE MEM2_MAX_SIZE/MEM2_BLOCK_SIZE
//内存管理控制器
struct _malloc_dev
{
void (*init)(u8); //初始化
u8 (*perused)(u8); //内存使用率
u8 *membase[SRAMBANK]; //内存池
u16 *memmap[SRAMBANK]; //内存管理状态表
u8 memrdy[SRAMBANK]; //内存管理是否就绪
};
extern struct _malloc_dev malloc_dev;
void *mem_realloc(u8 memx, void *ptr, u32 size);
void *mem_malloc(u8 memx, u32 size);
void mem_free(u8 memx, void *ptr);
void mem_cpy(void *des, void *src, u32 len);
void mem_set(void *addr, u8 val, u32 len);
void mem_init(u8 memx);//memx:所属内存块
u8 mem_perused(u8 memx);
#endif //HELLOWORLD_MALLOC_Hmalloc.c
#include "malloc.h"
#pragma pack(4) //4字节对齐
u8 mem1base[MEM1_MAX_SIZE]; //内部SRAM内存池
u8 mem2base[MEM2_MAX_SIZE]__attribute__((section (".malloc")));//外部SRAM内存池
//MAP
u16 mem1mapbase[MEM1_ALLOC_TABLE_SIZE];
u16 mem2mapbase[MEM2_ALLOC_TABLE_SIZE]__attribute__((section (".mallocmap")));
//内存管理参数
const u32 memtblsize[SRAMBANK] = {MEM1_ALLOC_TABLE_SIZE, MEM2_ALLOC_TABLE_SIZE};//内存表大小(一共多少块)
const u32 memblksize[SRAMBANK] = {MEM1_BLOCK_SIZE, MEM2_BLOCK_SIZE};//每个快的大小
const u32 memsize[SRAMBANK] = {MEM1_MAX_SIZE, MEM2_MAX_SIZE};//内存总大小
//内存管理控制器
struct _malloc_dev malloc_dev=
{
mem_init,
mem_perused,
mem1base, mem2base,
mem1mapbase, mem2mapbase,
0, 0,
};
//复制内存
//*des:目的地址(Destination)
//*src:源地址
//len:单位:字节
void mem_cpy(void *des, void *src, u32 len)
{
u8 *xdes = des;
u8 *xsrc = src;
while (len--)
{
*xdes++ = *xsrc++;
}
}
void mem_set(void *addr, u8 val, u32 len)
{
u8 *xaddr = addr;
while (len--)
{
*xaddr++ = val;
}
}
//memx:所属内存块
void mem_init(u8 memx)//初始化时,只用将内存池和内存管理表都清零即可。
{
mem_set(malloc_dev.memmap[memx], 0, memtblsize[memx] * 2);
mem_set(malloc_dev.membase[memx], 0, memsize[memx]);
malloc_dev.memrdy[memx]=1;
}
u8 mem_perused(u8 memx)
{
u32 used=0;
for(u32 i=0;i= 0; offset --)
{
if(!malloc_dev.memmap[memx][offset])cmemb++;
else cmemb = 0;
if(cmemb == nmemb) //找到了
{
for(u32 i = 0; i < nmemb; i++)
{
malloc_dev.memmap[memx][offset + i] = nmemb; //填表
}
return (offset*memblksize[memx]);;//返回偏移地址
}
}
return 0XFFFFFFFF;//未找到符合分配条件的内存块
}
//返回值: 0,释放成功; 1,释放失败;
u8 _mem_free(u8 memx,u32 offset)
{
if (!malloc_dev.memrdy[memx])
{
malloc_dev.init(memx);//未初始化
return Fail;
}
if (offset < memsize[memx]) //偏移在内存池中
{
int index = offset/memblksize[memx]; //偏移所在内存块号码
int nmemb=malloc_dev.memmap[memx][index]; //内存块数量
for(int i=0; i < nmemb; i++) //内存块清零
{
malloc_dev.memmap[memx][index+i] = 0;
}
return OK;
}
else //偏移超区了.
{
return Fail;
}
}
//返回值:分配到的内存首地址 (为NULL就错误)
void *mem_malloc(u8 memx, u32 size)
{
u32 offset;
offset = _mem_malloc(memx,size);
if(offset == 0xFFFFFFFF) return NULL;
else return (void*)((u32)malloc_dev.membase[memx]+offset);
}
void mem_free(u8 memx, void *ptr)
{
u32 offset;
if(ptr==NULL)return;//地址为 0.
offset=(u32)ptr-(u32)malloc_dev.membase[memx];
_mem_free(memx,offset); //释放内存
}
//返回值:分配到的内存首地址 (为NULL就错误)
void *mem_realloc(u8 memx, void *ptr, u32 size)
{
u32 offset;
offset=_mem_malloc(memx,size);
if(offset==0XFFFFFFFF)return NULL;
else
{
mem_cpy((void *) ((u32) malloc_dev.membase[memx] + offset), ptr, size); //拷贝
mem_free(memx,ptr); //释放旧内存
return (void*)((u32)malloc_dev.membase[memx]+offset); //返回新内存首地址
}
} 不过,由于是GCC编译,如果继续使用
__align(32) u8 mem2base[MEM2_MAX_SIZE] __attribute__((at(0X68000000)));就会出现
warning: 'at' attribute directive ignored [-Wattributes]解决方法
arm-gcc同样支持指定变量地址,只不过语法是下面这样的:
__attribute__ ((section ("SECTIONNAME")))换句话说,在link文件中划分一个新的段,将这个变量放到这个段内就可以解决了。
于是,
u8 mem1base[MEM1_MAX_SIZE]; //内部SRAM内存池
u8 mem2base[MEM2_MAX_SIZE]__attribute__((section (".malloc")));//外部SRAM内存池
//MAP
u16 mem1mapbase[MEM1_ALLOC_TABLE_SIZE];
u16 mem2mapbase[MEM2_ALLOC_TABLE_SIZE]__attribute__((section (".mallocmap")));然后我们在去ld文件中创建这个段。CubeMX生成的工程下面找到
在里面我们找到Specify the memory areas
MEMORY
{
RAM (xrw) : ORIGIN = 0x20000000, LENGTH = 64K
FLASH (rx) : ORIGIN = 0x8000000, LENGTH = 512K
MALLOC(rw) : ORIGIN = 0x68000000, LENGTH = 1024K
MALLOCMAP(rw) : ORIGIN = 0x680F0000, LENGTH = 60K
}给出地址的划分区间,这里增加了一个由malloc使用的MALLOC段,放在外部SRAM上,地址0x68000000,然后把表放在MALLOC之后,表的大小可以由表的数据类型大小乘以块的数量得到。
然后再
.malloc :
{
. = ALIGN(4);
__MALLOC_SYMBOLS = .;
*(.malloc)
*(.malloc*)
. = ALIGN(4);
__EMALLOC_SYMBOLS = .;
} >MALLOC
.mallocmap :
{
. = ALIGN(4);
__MALLOCMAP_SYMBOLS = .;
*(.mallocmap)
*(.mallocmap*)
. = ALIGN(4);
__EMALLOCMAP_SYMBOLS = .;
} >MALLOCMAP . = ALIGN(4);是指4字节对齐
.,小数点表示当前的地址位置,例如__MALLOC_SYMBOLS = .;的意思是`__MALLOC_SYMBOLS 的地址就是.malloc段的地址
一般的程序中包含常见的几个段:text(存放程序),rodata(存放被初始化的数据),data(表示初始化不为0的变量),bss(表示初始化值为默认的全局变量)
text,rodata放在flash中,而data中的初始化值作为rodata放在flash中,变量在ram中占有空间,bss占ram空间
段可以自定义,如上面写的malloc段,由于编译obj过程中不会生成用户自定义的段,因此在源码中需要指定需要特殊处理的段
结尾的>MALLOC指上面花括号内的内容都放在第二部分中定义的MALLOC空间中。如果没有AT> FLASH,那么编译bin文件时地址是连续的。不过我加上了之后会出现报错section `.malloc' will not fit in region `FLASH',于是没加,不过好像也能运行。希望明白的网友给出解答。
这里附上整个ld文件:
/*
******************************************************************************
**
** File : LinkerScript.ld
**
** Author : STM32CubeMX
**
** Abstract : Linker script for STM32F103ZETx series
** 512Kbytes FLASH and 64Kbytes RAM
**
** Set heap size, stack size and stack location according
** to application requirements.
**
** Set memory bank area and size if external memory is used.
**
** Target : STMicroelectronics STM32
**
** Distribution: The file is distributed “as is,” without any warranty
** of any kind.
**
*****************************************************************************
** @attention
**
** © COPYRIGHT(c) 2019 STMicroelectronics
**
** Redistribution and use in source and binary forms, with or without modification,
** are permitted provided that the following conditions are met:
** 1. Redistributions of source code must retain the above copyright notice,
** this list of conditions and the following disclaimer.
** 2. Redistributions in binary form must reproduce the above copyright notice,
** this list of conditions and the following disclaimer in the documentation
** and/or other materials provided with the distribution.
** 3. Neither the name of STMicroelectronics nor the names of its contributors
** may be used to endorse or promote products derived from this software
** without specific prior written permission.
**
** THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
** AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
** IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
** DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
** FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
** DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
** SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
** CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
** OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
** OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
**
*****************************************************************************
*/
/* Entry Point */
ENTRY(Reset_Handler)
/* Highest address of the user mode stack */
_estack = ORIGIN(RAM) + LENGTH(RAM); /* end of RAM */
/* Generate a link error if heap and stack don't fit into RAM */
_Min_Heap_Size = 0x200; /* required amount of heap */
_Min_Stack_Size = 0x400; /* required amount of stack */
/* Specify the memory areas */
MEMORY
{
RAM (xrw) : ORIGIN = 0x20000000, LENGTH = 64K
FLASH (rx) : ORIGIN = 0x8000000, LENGTH = 512K
MALLOC(rw) : ORIGIN = 0x68000000, LENGTH = 1024K
MALLOCMAP(rw) : ORIGIN = 0x680F0000, LENGTH = 60K
}
/* Define output sections */
SECTIONS
{
/* The startup code goes first into FLASH */
.isr_vector :
{
. = ALIGN(4);
KEEP(*(.isr_vector)) /* Startup code */
. = ALIGN(4);
} >FLASH
/* The program code and other data goes into FLASH */
.text :
{
. = ALIGN(4);
*(.text) /* .text sections (code) */
*(.text*) /* .text* sections (code) */
*(.glue_7) /* glue arm to thumb code */
*(.glue_7t) /* glue thumb to arm code */
*(.eh_frame)
KEEP (*(.init))
KEEP (*(.fini))
. = ALIGN(4);
_etext = .; /* define a global symbols at end of code */
} >FLASH
/* Constant data goes into FLASH */
.rodata :
{
. = ALIGN(4);
*(.rodata) /* .rodata sections (constants, strings, etc.) */
*(.rodata*) /* .rodata* sections (constants, strings, etc.) */
. = ALIGN(4);
} >FLASH
.ARM.extab : { *(.ARM.extab* .gnu.linkonce.armextab.*) } >FLASH
.ARM : {
__exidx_start = .;
*(.ARM.exidx*)
__exidx_end = .;
} >FLASH
.preinit_array :
{
PROVIDE_HIDDEN (__preinit_array_start = .);
KEEP (*(.preinit_array*))
PROVIDE_HIDDEN (__preinit_array_end = .);
} >FLASH
.init_array :
{
PROVIDE_HIDDEN (__init_array_start = .);
KEEP (*(SORT(.init_array.*)))
KEEP (*(.init_array*))
PROVIDE_HIDDEN (__init_array_end = .);
} >FLASH
.fini_array :
{
PROVIDE_HIDDEN (__fini_array_start = .);
KEEP (*(SORT(.fini_array.*)))
KEEP (*(.fini_array*))
PROVIDE_HIDDEN (__fini_array_end = .);
} >FLASH
/* used by the startup to initialize data */
_sidata = LOADADDR(.data);
/* Initialized data sections goes into RAM, load LMA copy after code */
.data :
{
. = ALIGN(4);
_sdata = .; /* create a global symbol at data start */
*(.data) /* .data sections */
*(.data*) /* .data* sections */
. = ALIGN(4);
_edata = .; /* define a global symbol at data end */
} >RAM AT> FLASH
/* Uninitialized data section */
. = ALIGN(4);
.bss :
{
/* This is used by the startup in order to initialize the .bss secion */
_sbss = .; /* define a global symbol at bss start */
__bss_start__ = _sbss;
*(.bss)
*(.bss*)
*(COMMON)
. = ALIGN(4);
_ebss = .; /* define a global symbol at bss end */
__bss_end__ = _ebss;
} >RAM
/* User_heap_stack section, used to check that there is enough RAM left */
._user_heap_stack :
{
. = ALIGN(8);
PROVIDE ( end = . );
PROVIDE ( _end = . );
. = . + _Min_Heap_Size;
. = . + _Min_Stack_Size;
. = ALIGN(8);
} >RAM
/* My Code */
.malloc :
{
. = ALIGN(4);
__MALLOC_SYMBOLS = .;
*(.malloc)
*(.malloc*)
. = ALIGN(4);
__EMALLOC_SYMBOLS = .;
} >MALLOC
.mallocmap :
{
. = ALIGN(4);
__MALLOCMAP_SYMBOLS = .;
*(.mallocmap)
*(.mallocmap*)
. = ALIGN(4);
__EMALLOCMAP_SYMBOLS = .;
} >MALLOCMAP AT> FLASH
/* My Code End */
/* Remove information from the standard libraries */
/DISCARD/ :
{
libc.a ( * )
libm.a ( * )
libgcc.a ( * )
}
.ARM.attributes 0 : { *(.ARM.attributes) }
}于是就实现了malloc,free,realloc(对一段地址重新分配)的功能。
四、可变大小内存块分配
可见,上面固定大小内存块方式在查找和释放时,都需要遍历、置/清内存表标志位,比较费时间。而可变大小内存块的思想是:将待分配的内存分为大、中、小这么几类。每一类由相同大小的内存块通过一个单链表链接在一起组成。初始化后,空闲链表*pFree就指向这个单链表头。
当需要申请内存的时候,按照从小到大的顺序,在这几类里面找到刚好能够容纳下申请内存的buf。如果找到,就直接将这类内存块的空闲链表头返回给它即可。然后空闲链表头指向next即可完成内存的申请。
在释放的时候,按照从大到小的顺序,找到和待释放的内存块大小相同的那类内存块,将其重新插入那类内存块空闲链表头,即完成释放。
这就是可变大小内存池的分配基本思路。
优点 |
缺点 |
|
固定大小内存块 |
灵活度高,能以较少的内存碎片,分配各种大小的内存; |
效率低,每次都要从尾部遍历一遍memmap,找合适大小的内存,置/清内存表; |
可变大小内存块 |
申请和释放速度快,效率高; |
1.需提前估算大概的内存需求大小; 2.灵活度不够,分配不好很容易内存碎片; |
具体实现可以参照:
两种内存池管理方法对比