PCL知识点汇总
文章目录
- 1.点云常用处理
-
- 1.1点云读写
-
- 1.1.1点云存储格式
- 1.1.2点的类型
- 1.1.3读写显示
- 1.1.4点云拼接
- 1.2搜索方式
-
- 1.2.1KDTree
- 1.2.2Octree
- 1.3点云滤波
-
- 1.3.1直通滤波
- 1.3.2VoxelGrid滤波
- 1.3.3均匀采样滤波(下采样)
- 1.3.4statisticalOutlierRemoval统计滤波
- 1.3.5RadiusOutlinerRemoval半径滤波
- 1.3.6ConditionalRemoval条件滤波
- 1.3.7投影滤波
- 1.3.8模型滤波
- 1.3.9高斯滤波
- 1.3.10双边滤波
- 1.3.11ExtractIndices索引提取
- 1.3.12CropHull滤波
- 1.4点云分割
-
- 1.4.1随机采样一致(RANSAC)
- 1.4.2欧式聚类分割
- 1.4.3条件欧式聚类分割
- 1.4.4基于区域生长分割
- 1.4.5颜色的区域生长分割
- 1.4.6最小图割的分割
- 1.4.7基于法线微分分割
- 1.4.8基于超体素的分割
- 1.5点云特征点
-
- 1.5.1PFH
- 1.5.2FPFH
- 1.5.3VFH
- 1.5.4CVFH
- 1.5.5RIFT
- 1.5.6NARF
- 1.5.7RSD
- 1.5.8ESF
- 1.6点云配准
-
- 1.6.1ICP迭代最近点算法
- 1.6.2匹配多幅点云
- 1.7类型转换
-
- 1.6.1Ptr<—>Cloud
- 1.6.2PCLPointCloud2<—>PointCloud< pcl::PointXYZ >
- 1.8相关参数
-
- 1.8.1模型参数
1.点云常用处理
1.1点云读写
1.1.1点云存储格式
1.pcd
2.ply
3.txt
4.obj
5…
1.1.2点的类型
#include 1.1.3读写显示
1.PCD
#include 2.PLY
#include 3.TXT
获取.txt中点xyz值存储为PointXYZ类型的点,其他格式同理
4.可视化
#include //窗口相关设置
//设置视窗xy最小最大坐标(0-1间),渲染器
void createViewPort (double xmin, double ymin, double xmax, double ymax, int &viewport);
//双视窗
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3DViewer"));
//添加坐标系
viewer->addCoordinateSystem();
viewer->initCameraParameters();
int v1(0),v2(0);
viewer->createViewPort(0.0,0.0,0.5,1.0,v1);
//设置背景颜色
viewer->setBackgroundColor(0,0,0,v1);
//添加视窗名称
viewer->addText("original", 10,10,"v1 text",v1);
//添加点云
viewer->addPointCloud(cloud,"sample cloud1", v1);
//v2同理
- setPointCloudRenderingProperties属性参数
| 属性 | 默认值 |
|---|---|
| PCLVISUALIZER_COLOR | 4 |
| PCLVISUALIZER_FONT_SIZE | 3 |
| PCLVISUALIZER_IMMEDIATE_RENDERING | 6 |
| PCLVISUALIZER_LINE_WIDTH | 2 |
| PCLVISUALIZER_OPACITY透明高 | 1 |
| PCLVISUALIZER_POINT_SIZE | 0 |
| PCLVISUALIZER_REPRESENTATION | 5 |
| PCLVISUALIZER_REPRESENTATION_POINTS | 0 |
| PCLVISUALIZER_REPRESENTATION_SURFACE | 2 |
| PCLVISUALIZER_REPRESENTATION_WIREFRAME | 1 |
- 相机视角相关参数
void pcl::visualization::PCLVisualizer::setCameraPosition
(double pos_x,double pos_y,double pos_z,
double view_x,double view_y,double view_z,
double up_x,double up_y,double up_z,int viewport = 0 )
| 参数 | 含义 |
|---|---|
| pos | 相机所在的位置即观察点 |
| view | 相机看向的点即焦点 |
| up | 相机朝上的方向 |
| viewport | 修改相机的视口0修改所有相机 |

1.1.4点云拼接
#include 1.2搜索方式
- 提高查找和处理速度 优化系统性能
1.2.1KDTree
#include 
1.2.2Octree
#include 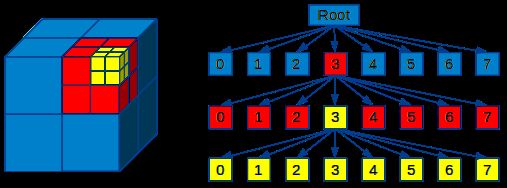
1.3点云滤波
- 数据量大需下采样
- 平滑 去噪 去除离群点
1.3.1直通滤波
- 简单高效,适用于消除背景等操作
#include 
1.3.2VoxelGrid滤波
- voxelGrid类通过在点云数据中创建三维体素栅格,然后用每个体素的质心来近似表达体素中的其它点。
#include
1.3.3均匀采样滤波(下采样)
- 与体素滤波(建立正方体)相似,但不改变点的位置,准确度好于体素滤波
- 构建指定半径球体对点云进行下采样滤波,将每一个球内距离球体中心最近的点作为下采样之后的点输出。
#include keypointIndices;
//filter.compute(keypointIndices);
//pcl::copyPointCloud(*cloud, keypointIndices.points, *outcloud);
filter.filter(*outcloud);
1.3.4statisticalOutlierRemoval统计滤波
- 滤除稀疏离群点,计算查询点与领域点集的距离判断是否为离群点。
- 计算点云中每一个点与其临近点的平均距离,假设得到的结果为高斯分布,形状由均值和标准差决定,平均距离在标准范围之外的点定义为离群点并滤除。
#include 
1.3.5RadiusOutlinerRemoval半径滤波
- 滤除指定半径范围内点数小于某设定值的点
#include 1.3.6ConditionalRemoval条件滤波
- 设定滤波条件进行滤波,删除不符合用户指定的一个或者多个条件
#include | 参数 | 含义 |
|---|---|
| LT | less than小于 |
| LE | less than or equal 小于等于 |
| EQ | 等于 |
| GE | 大于等于 |
| GT | 大于 |
1.3.7投影滤波
- 将三维点云投影至二维平面,用图像处理的方式处理
- 参数化模型可以是平面,圆球/柱等
#include 1.3.8模型滤波
- 根据点到模型的距离,设置距离阈值过滤非模型点,
基于模型的点分割操作,将模型外的点从点云中剔除
#include 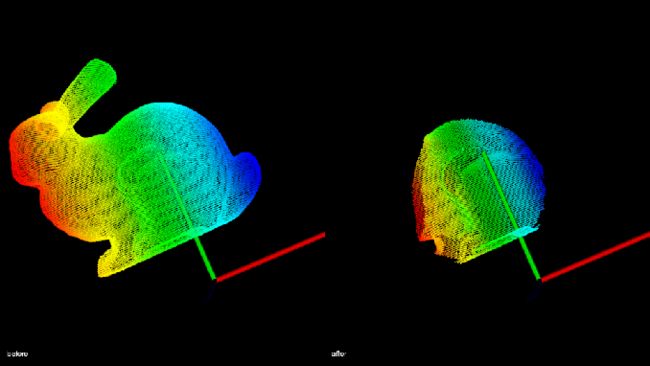
1.3.9高斯滤波
- 基于高斯核的卷积滤波实现,高斯滤波相当于一个具有平滑性能的低通滤波。
#include 1.3.10双边滤波
- 非线性滤波器,保持边缘,降噪平滑
#include 1.3.11ExtractIndices索引提取
- 利用索引向量来构建点云索引并提取点云子集
#include 1.3.12CropHull滤波
- 得到2D封闭多边形内部或外部的点云
//求上面给出的这个边框点集的凸包
pcl::ConvexHull<pcl::PointXYZ> hull;
hull.setInputCloud(boundingbox_ptr);
//设置凸包维度
hull.setDimension(2);
//polygons保存的是所有凸包多边形的顶点在surface_hull中的下标,用于保存凸包顶点
std::vector<pcl::Vertices> polygons;
pcl::PointCloud<pcl::PointXYZ>::Ptr
surface_hull (new pcl::PointCloud<pcl::PointXYZ>);
//凸包点云存放在surface_hull中,polygons中的Vertices存放一组点的索引,索引是surface_hull中的点对应的索引
hull.reconstruct(*surface_hull, polygons);
pcl::PointCloud<pcl::PointXYZ>::Ptr objects (new pcl::PointCloud<pcl::PointXYZ>);
pcl::CropHull<pcl::PointXYZ> bb_filter;
//设置维度
bb_filter.setDim(2);
bb_filter.setInputCloud(cloud);
//封闭多边形顶点
bb_filter.setHullIndices(polygons);
//封闭多边形形状
bb_filter.setHullCloud(surface_hull);
bb_filter.filter(*objects);
std::cout << objects->size() << std::endl;
1.4点云分割
1.4.1随机采样一致(RANSAC)
- 随机取两个点计算直线模型方程
- 将所有数据点套到模型中计算误差
- 找到所有满足误差阈值的点
- 重复上述步骤,直到达到一定迭代次数K,选出被支持最多的模型作为解
#include 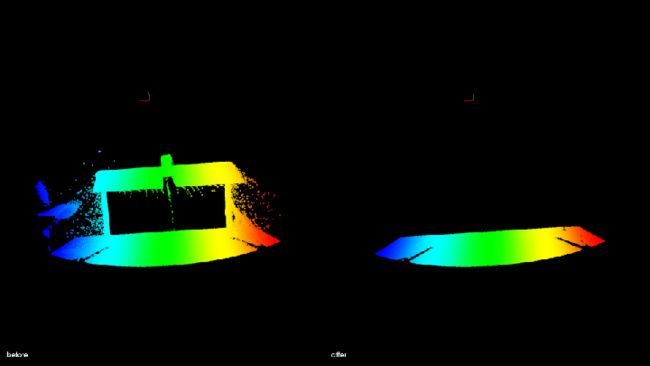
1.4.2欧式聚类分割
- 空间中一点P利用KDTree找离其最近n个点P1P2P3…,距离小于阈值r则归入类Q中
- 在类中另取一点P1,重复上述步骤,将找到的P22P23P24放入类Q中
- 当类Q中没有新的点加入,搜索完成
#include 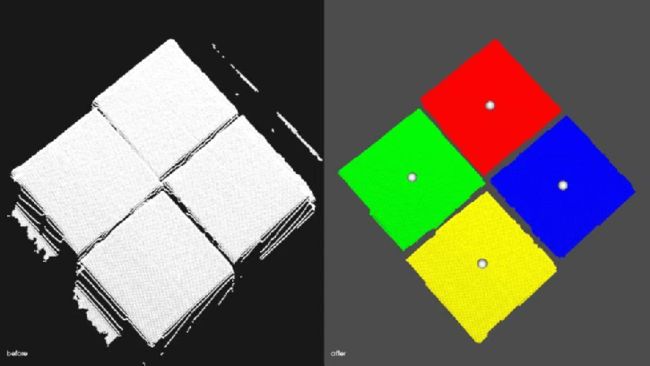
1.4.3条件欧式聚类分割
- 聚类约束条件(欧式距离、平滑度、RGB颜色等)可以由用户自己定义,即当搜索到一个近邻点时,用户可以自定义该邻域点是否合并到当前聚类的条件
- 以第一个点为标准作为种子点,候选其周边的点作为它的对比或者比较的对象,
如果满足条件就加入到聚类的对象中
#include
1.4.4基于区域生长分割
- 将具有相似性的点云集合起来构成区域。
- 计算法线曲率,依据曲率升序排序;
选曲率最低为初始种子点,种子周围的临近点和
种子点云相比较;法线的方向是否足够相近(法线夹角足够 r p y),法线夹角阈值; 曲率是否足够小(表面处在同一个弯曲程度),区域差值阈值;如果满足2,3则该点可用做种子点;如果只满足2,则归类而不做种子;
#include 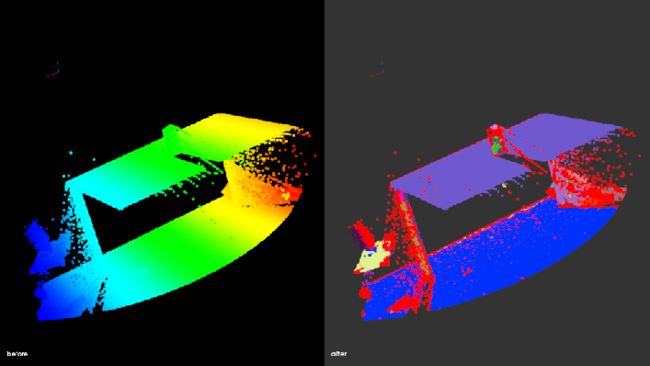
1.4.5颜色的区域生长分割
- 分割,当前种子点和领域点之间色差小于色差阀值的视为一个聚类;合并,聚类之间的色差小于色差阀值和并为一个聚类,且当前聚类中点的数量小于聚类点数量的与最近的聚类合并在一起
#include
1.4.6最小图割的分割
- 建图;为边缘分配权重;设置数据成本;对前背景点进行划分。
#include 1.4.7基于法线微分分割
- 对于输入点云数据中的每一点,利用较大的支撑半径计算法向量;对于输入点云数据中的每一点,单位化每一点的法向量差异;过滤所得的向量域(DoN特征向量),分割出目标尺寸对应的点云。
#include 1.4.8基于超体素的分割
- 以八叉树对点云进行划分,获得不同点团之间的邻接关系
//体素大小,空间八叉树的分辨率,类kinect或xtion获取的数据0.008左右合适
float voxel_resolution = 0.008f;
//种子的分辨率,一般可设置为体素分辨率的50倍以上
float seed_resolution = 0.1f;
//针对分割场景,如果分割场景中各个物体之间的颜色特征差异明显,可以设置较大
float color_importance = 0.2f;
//设置较大且其他影响较小时,基本按照空间分辨率来决定体素分割
float spatial_importance = 0.4f;
//针对分割场景,如果分割场景中各个物体连通处的法线特征差异明显,可以设置较大,但在实际使用中,需要针对数据的结构适当考虑,发现估计的准确性等因素
float normal_importance = 1.0f;
//生成结晶器
pcl::SupervoxelClustering<PointT> super(voxel_resolution, seed_resolution);
//和点云形式有关
if(disable_transform)
super.setUseSingleCameraTransform(false);
//输入点云及结晶参数
super.setInputCloud(cloud);
super.setColorImportance(color_importance);
super.setSpatialImportance(spatial_importance);
super.setNormalImportance(normal_importance);
//输出结晶分割结果:结果是一个映射表
std::map <uint32_t, pcl::Supervoxel<PointT>::Ptr > supervoxel_clusters;
//获得晶体中心
super.extract(supervoxel_clusters);
//获得晶体
PointCloudT::Ptr voxel_centroid_cloud = super.getVoxelCentroidCloud();
PointLCloudT::Ptr labeled_voxel_cloud = super.getLabeledVoxelCloud();
1.5点云特征点
| Feature Name | Supports Texture / Color | Local / Global / Regional | Best Use Case |
|---|---|---|---|
| PFH | No | L | |
| FPFH | No | L | 2.5D Scans (Pseudo single position range images) |
| VFH | No | G | Object detection with basic pose estimation |
| CVFH | No | R | Object detection with basic pose estimation, detection of partial objects |
| RIFT | Yes | L | Real world 3D-Scans with no mirror effects. RIFT is vulnerable against flipping. |
| RSD | No | L | |
| NARF | No | L | 2.5D (Range Images) |
1.5.1PFH
- 局部特征点
- (1)计算P中点云法线;估计P中的点Pi的特征。
(2)获取围绕点Pi(Pik)的半径r中的k个邻居的集合。在两点之间计算四个特征。相应的bin增加1.生成点特征直方图(PFH)。
(3)将得到的直方图组与其他点云的组进行比较,以便找到对应关系。
1.5.2FPFH
- (1)计算P中点法线;获取围绕点Pi(Pik)的半径r中的k个邻居的集合。在两点之间计算三个特征(仅在Pi与其邻居之间!)。相应的bin增加1.生成简单的点特征直方图(SPFH)
(2)为了达到更多的点和连接(最多2次r),邻居的SPFH根据它们的空间距离加以加权作为最后一步
(3)可以将得到的直方图组与其他点云的组进行比较,以便找到对应关系。
1.5.3VFH
- 全局特征点
- (1)估算点云中的质心及其法线。计算视点和视点之间的归一化矢量vc。
(2)对于所有点,计算它们的法线和vc之间的角度。
(3)估算质心的FPFH,将所有剩余点设置为邻居。
1.5.4CVFH
- 基于区域描述
- (1)将点云细分为具有相似法线的相邻点的聚类(稳定区域)。
(2)计算每个群集的VFH。
(3)将形状分布组件(SDC)添加到每个直方图。
1.5.5RIFT
- 局部特征描述法,输入点须有纹理
- (1)对于P样本中的每个点Pi,Pi周围的所有k个邻居。
(2)根据距离d和它们的梯度角θ将所有邻居分配给直方图。
(3)可以将得到的直方图组与其他点云的组进行比较,以便找到对应关系。
1.5.6NARF
- 局部特征点,输入深度图像
- (1)对于深度图像RI中的每个关键点Pi,对Pi周围的所有邻居进行采样,并将它们转换为局部坐标系,其中Pi为O.
(2)在图像块上投射星形图案并计算每个光束下的强度变化以获得光束的分数。 在计算中,更靠近中心的光束具有更大的权重。 分数归一化为[-0.5,0.5]。
(3)迭代所有光束并找到图像块的主要方向。
1.5.7RSD
- 局部特征点
- (1)对于P样本中的每个点Pi,Pi周围的所有k个邻居。
(2)根据距离d和无向法线的角度将所有邻居分配到直方图。
(3)假设与每个邻居的Pi对描述一个圆(见图)。 找到Pi描述的所有球体的最小和最大半径及其邻域。
(4)得到的直方图和半径组可以与其他点云的组合进行比较,以便找到对应关系。
1.5.8ESF
- (1)开始一个从点云P中随机抽样20,000点的循环。每轮样本三点Pri,Prj,Prk。
(2)对于两个点对,计算彼此之间的距离,并检查两者之间的线是否位于表面上,外部或与物体相交(IN,OUT或MIXED)。在D2的三个子图表中的一个中增加与计算的距离对应的bin。
(3)对于前一行,找到位于表面或外部的那条线的部分之间的比率。结果应该是0表示完全在外面,1表示完全在表面上,并且来自MIXED线的所有值都在它们之间分布。增加D2比率直方图的对应bin。
(4)对于三元组,建立一个三角形并计算两侧之间的角度,并将角度的一侧分为三角形(IN,OUT,MIXED)。增加A3的IN,OUT或MIXED子组合图中的相应角度箱。
(5)对于前一个三角形,计算区域的平方根,并将区域分为IN,OUT或MIXED。增加D3的IN,OUT或MIXED子组合图中的相应区域bin。
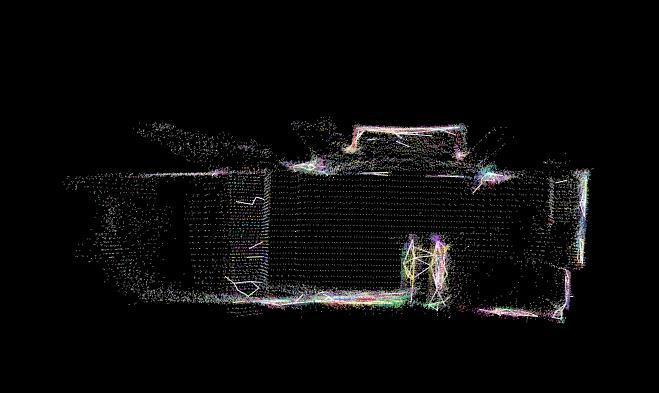
1.6点云配准
- 点云不完整,旋转错位,平移错位
- 确定一个合适的坐标系,将从各个视角得到的点集合并到统一的坐标系下形成一个完整的点云。关键:得到坐标变换的参数R(旋转矩阵)和T(平移向量),使得两视角下测得的三维数据经坐标变换后的距离最小
- 实质:把不同的坐标系中测得到的数据点云进行坐标系的变换,以得到整体的数据模型。
提取关键点->计算特征描述子->估算对应关系及点对->除去噪声点对->用剩余的正确的对应关系来估算刚体变换完成配准
1.6.1ICP迭代最近点算法
- 程序随机生成一个点与作为源点云,并将其沿x轴平移后作为目标点云,然后利用ICP估计源到目标的刚体变换矩阵
#include 1.6.2匹配多幅点云
#include 1.7类型转换
1.6.1Ptr<—>Cloud
//ptr->cloud
pcl::PointCloud<pcl::PointXYZ> cloud;
pcl::PointCloud < pcl::PointXYZ >::ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
cloud=*cloud_ptr;
//cloud->ptr
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ> cloud;
cloud_ptr=cloud.makeShared();
1.6.2PCLPointCloud2<—>PointCloud< pcl::PointXYZ >
//PCLPointCloud2—>PointCloud< pcl::PointXYZ >
pcl::fromPCLPointCloud2(*cloud_blob, *cloud);
//PointCloud< pcl::PointXYZ >—>PCLPointCloud2
pcl::toPCLPointCloud2(*cloud, *cloud_blob);
1.8相关参数
1.8.1模型参数
- setModelType
| 参数 | 含义 |
|---|---|
| SACMODEL_PLANE | 平面模型,4个参数ax+by+cz+d=0 |
| SACMODEL_LINE | 线模型,直线的六个系数由直线上的一个点和直线的方向给出 |
| SACMODEL_CIRCLE2D | 确定平面中的2D圆,圆的三个系数由其中心和半径给出 |
| SACMODEL_CIRCLE3D | 平面中的3D圆,圆的七个系数由其中心、半径和法线给出 |
| SACMODEL_SPHERE | 球体模型,球体的四个系数由其3D中心和半径给出。 |
| SACMODEL_CYLINDER | 气缸模型,圆柱体的七个系数由其轴上的点、轴方向和半径给出 |
| SACMODEL_CONE | 锥模型,锥体的七个系数由其顶点、轴方向和张角给出。 |
| SACMODEL_PARALLEL_LINE | 在最大指定角度偏差内确定与给定轴平行的线的模型 |
| SACMODEL_PERPENDICULAR_PLANE | 在最大指定角度偏差内确定垂直于用户指定轴的平面的模型 |
| SACMODEL_NORMAL_PLANE | 使用附加约束确定平面模型的模型:每个内点的表面法线必须平行于输出平面的表面法线,在指定的最大角度偏差内。平面系数类似于SACMODEL_PLANE |
| SACMODEL_NORMAL_SPHERE | 类似于SACMODEL_SPHERE,但具有额外的表面法线约束。 |
| SACMODEL_PARALLEL_PLANE | 在最大指定角度偏差内确定平行于用户指定轴的平面的模型。平面系数类似于SACMODEL_PLANE |
| SACMODEL_NORMAL_PARALLEL_PLANE | 使用附加表面法线约束定义 3D 平面分割模型。平面法线必须平行于用户指定的轴。因此SACMODEL_NORMAL_PARALLEL_PLANE 等效于SACMODEL_NORMAL_PLANE + SACMODEL_PERPENDICULAR_PLANE。平面系数类似于SACMODEL_PLANE |
| SACMODEL_STICK | 3D 棒分割模型。一根棍子是一条给定用户最小/最大宽度的线 |