最小生成树——prim算法实现
案例引入
N个城市之间需要铺设一张交通网,使任意两个城市间都有交通路线直达,现已知各个城市之间铺设道路的经济成本,问该如何求算铺网的最低经济成本?为求算最低经济成本,可以假设N个城市就是连通网G的N个顶点,而求算最低成本问题可以转化为在N个城市间找到N-1条边,使这些边的权值之和达到最小。在N个顶点之间可以生成许多棵不同的生成树,而最合理的交通网就是N-1条边权值之和最小的生成树。
最小生成树定义
在一个连通网的所有生成树当中,各边权值之和最小的那棵生成树就叫做连通网的最小代价树,简称最小生成树。
MST性质
在构造最小生成树中,难免脱离不了对MST性质的应用。
该性质的定义为:假设U为连通网G=(V,E)中V的非空子集合,若(u,v)是一条权值最小的边,其中 ,那么必定存在一棵G的最小生成树包含(u,v)。
,那么必定存在一棵G的最小生成树包含(u,v)。
反证法:假设G的任意一棵最小生成树都不包含(u,v),设T为G的一棵最小生成树,那么必定存在(u1,v1)为T的一条边,且 .此时若在T中加入(u,v),那么新树newT一定存在环(在T中U集与V-U集分别可以构成两个连通分量),由于
.此时若在T中加入(u,v),那么新树newT一定存在环(在T中U集与V-U集分别可以构成两个连通分量),由于 ,可知u与u1在U集中是连通的,v与v1在V-U集中也是连通的,那么去掉(u1,v1)则将消除树的环,同时(u,v)可使U与V-U这两个连通分量重新组合成为一棵生成树。由于(u,v)的权值比(u1,v1)大,故(u,v)必定存在于某一棵最小树中。证明完毕!
,可知u与u1在U集中是连通的,v与v1在V-U集中也是连通的,那么去掉(u1,v1)则将消除树的环,同时(u,v)可使U与V-U这两个连通分量重新组合成为一棵生成树。由于(u,v)的权值比(u1,v1)大,故(u,v)必定存在于某一棵最小树中。证明完毕!
普里姆算法
算法思路
该算法也称为“加点法”,即每次都选取一条权值最小的边(u,v)加入到最小生成树中,其中,使v加入到U中并且更新U到V-U各个顶点的最小权值边;重复上述步骤,直到V=U为止。
我们可以将U看成一棵树,该树到V-U的各个顶点的权值最小边由U中的某个顶点决定,比如求算U到v的权值最小需要逐一比较U中的已有顶点到v的距离,选取到达v的距离最小的顶点u,规定(u,v)为U到V-U中顶点v的权值最小边。
普里姆算法的构造过程
假设N=(V,E)是连通网,TE是N上最小生成树的最小边集合。
初始化U={u0},TE={空},
 ;
;
选取U到V-U的最小权值边(u,v),将v加入到U中,(u,v)加入TE。由于v的加入,需要更新U到V-U的最小权值边;
重复步骤(2),直到U=V,构造结束。
注意事项:假如存在两条权值相同的最小边,则任意选取一条边加入TE。
辅助数组
由于需要选取U到V-U的最小权值边,故需要借助一个辅助数组Assistarr[mvnum]记录U到V-U的各个最小权值边。其中数组下标为顶点在邻接矩阵中的下标(待会用邻接矩阵作为连通网的存储结构),adject表示U到V-U最小权值边(u,v)中的顶点u,lowcost表示边(u,v)的最小权值,其中lowcost==0表示顶点已在U中,无需再次加入。
代码实现
//文件名为:AMGraph.h
#pragma once
#include
using namespace std;
//先实现邻接矩阵的搜索算法
#define Mvnum 100 //最大顶点数
typedef char VerType; //顶点数据类型
typedef int ArcType; //边的数据类型
typedef struct AMGraph {
int vexnum, arcnum;
VerType vexs[Mvnum]; //顶点信息表
ArcType arcs[Mvnum][Mvnum]; //邻接矩阵
}AMGraph;
//创建无向网
void CreateUDN(AMGraph& G); //文件名:AMGraph.cpp
#include"AMGraph.h"
//用邻接矩阵创建无向网
void CreateUDN(AMGraph& G)
{
//表示无穷大,以方便生成最小生成树
int inf = 999999999;
//输入顶点与边的个数,图的第一部分信息
cin >> G.vexnum >> G.arcnum;
//判断合法性
if (G.vexnum > Mvnum || G.arcnum > (G.vexnum - 1) * G.vexnum / 2)
{
cout << "所输入信息非法" << endl;
return;
}
//紧接着输入顶点的信息,图的第二部分信息
for (int i = 0;i < G.vexnum;i++)
{
cin >> G.vexs[i];
}
//将图的边初始化,权值全部置为inf,inf表示无穷大
for (int i = 0;i < G.vexnum;i++)
{
for (int j = 0;j < G.vexnum;j++)
G.arcs[i][j] = inf;
}
//输入权值
for (int i = 0;i < G.arcnum;i++)
{
//输入v1,v2作为边(v1,v2)的顶点以及边之间的权值w
//编号从0开始
int v1, v2, w;
//此处省略了查找v1,v2编号的过程
cin >> v1 >> v2 >> w;
//时刻关注合法性
if (v1 == v2 || v1 >= G.vexnum || v2 >= G.vexnum
|| v1 < 0 || v2 < 0)
{
i--;
continue;
}
if (G.arcs[v1][v2] != inf)
{
i--;
continue;
}
//输入边的权值
G.arcs[v1][v2] = G.arcs[v2][v1] = w;
}
//创建完毕
}
//文件名:prim.h
#pragma once
#include"AMGraph.h"
//定义辅助数组
typedef struct closedge {
//最小边(u,v)在U中的顶点
VerType adject;
//U到k的最小权值
ArcType lowcost;
}closedge;
//普里姆算法声明
void MiniSpanTree_Prim(const AMGraph& G, VerType u);
//查找下标函数
int LocateVex(const AMGraph& G, VerType u);
//找权值最小边,返回其在辅助数组中的下标
//注意数组名本身就是一个常量地址,不能传引用
int Findminarc(const AMGraph& G, const closedge* Assistarr);//文件名:prim.cpp
#include"prim.h"
//辅助数组
closedge Assistarr[Mvnum];
//查找下标函数
int LocateVex(const AMGraph& G, VerType u)
{
for (int i = 0;i < G.vexnum;i++)
{
if (G.vexs[i] == u)
return i;
}
//表示没有找到,一般都不会出现这种情况
return -1;
}
//找权值最小边,返回其在辅助数组中的下标
int Findminarc(const AMGraph& G, const closedge*Assistarr)
{
int mark = 999999999;
int k = 0;
for (int i = 0;i < G.vexnum;i++)
{
//排除已经在U中的顶点,该顶点下标为i
if (Assistarr[i].lowcost != 0)
{
if (mark > Assistarr[i].lowcost)
{
mark = Assistarr[i].lowcost;
k = i;
}
}
}
return k;
}
//实现普里姆算法,针对连通图而言
void MiniSpanTree_Prim(const AMGraph& G, VerType u)
{
//查找到u的下标,更新Assistarr数组的数据
int k = LocateVex(G, u);
if (k == -1)
{
cout << "顶点不存在" << endl;
return;
}
//更新Assistarr数组
for (int i = 0;i < G.vexnum;i++)
{
if (i != k)
{
//最小边(u0,v0)在U上的顶点最初都为u
Assistarr[i].adject = u;
//最小边的权值最初都为(u,v0)
Assistarr[i].lowcost = G.arcs[k][i];
}
}
//规定,如果Assistarr[i].lowcost ==0,则表示下标为i的顶点
//已经在U中
//顶点u一开始就在数组中,故Assistarr[k].lowest = 0;
Assistarr[k].lowcost = 0;
//紧接着,将剩余的n-1个顶点加入到U中
for (int i = 1;i < G.vexnum;i++)
{
//找到权值最小边(u,v),u在U中,v在V-U中,因此只需要放回最小边在
//数组中的下标k
int k = Findminarc(G,Assistarr);
//在U中的顶点
VerType u0 = Assistarr[k].adject;
//通过下标k在vexs数组中找到其顶点值
VerType v0 = G.vexs[k];
//打印最小生成树的一条边
cout << u0 << "--" << v0 << endl;
//将下标为k的顶点加入到U中
Assistarr[k].lowcost = 0;
//更新最小权值边
for (int j = 0;j < G.vexnum;j++)
{
//G.arcs[k][j]表示(k,j)的权值,Assistarr[j].lowcost
//表示目前U中的顶点到V-U下标为j的最小权值
if (G.arcs[k][j] < Assistarr[j].lowcost)
{
Assistarr[j].lowcost = G.arcs[k][j];
Assistarr[j].adject = G.vexs[k];
}
}
}
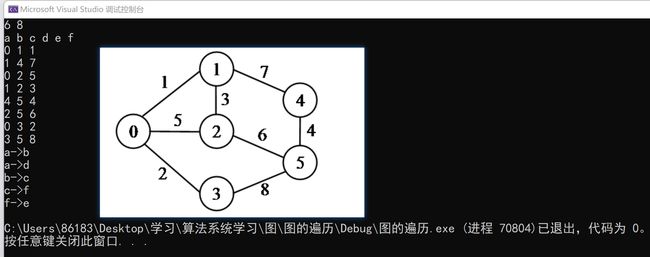
}测试
void test01()
{
AMGraph G;
CreateUDN(G);
MiniSpanTree_Prim(G, G.vexs[0]);
}
int main()
{
test01();
return 0;
}测试结果
算法分析
在上述算法的二层循环中,第一层循环旨在将n-1条边加入到TE,故需要循环n-1次。同时,每次找最小权值边与更新最小权值边都需要扫描n次,因此时间复杂度为O(n^2)。算法的时间复杂度与顶点的个数有关,与图的存储结构无关,因此prim算法适合于稠密图。另外,由于辅助数组也会产生额外的内存空间,故空间复杂度为O(n)。